- Dirac delta function
-
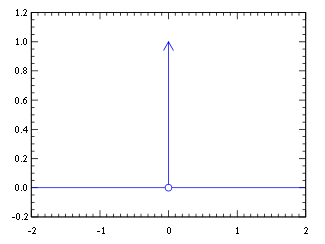 Schematic representation of the Dirac delta function by a line surmounted by an arrow. The height of the arrow is usually used to specify the value of any multiplicative constant, which will give the area under the function. The other convention is to write the area next to the arrowhead.
Schematic representation of the Dirac delta function by a line surmounted by an arrow. The height of the arrow is usually used to specify the value of any multiplicative constant, which will give the area under the function. The other convention is to write the area next to the arrowhead.
 The Dirac delta function as the limit (in the sense of distributions) of the sequence of Gaussians
The Dirac delta function as the limit (in the sense of distributions) of the sequence of Gaussians as
as 
The Dirac delta function, or δ function, is (informally) a generalized function depending on a real parameter such that it is zero for all values of the parameter except when the parameter is zero, and its integral over the parameter from −∞ to ∞ is equal to one.[1][2] It was introduced by theoretical physicist Paul Dirac. In the context of signal processing it is often referred to as the unit impulse function. It is a continuous analog of the Kronecker delta function which is usually defined on a finite domain, and takes values 0 and 1.
From a purely mathematical viewpoint, the Dirac delta is not strictly a function, because any extended-real function that is equal to zero everywhere but a single point must have total integral zero.[3] While for many purposes the Dirac delta can be manipulated as a function, formally it can be defined as a distribution that is also a measure. In many applications, the Dirac delta is regarded as a kind of limit (a weak limit) of a sequence of functions having a tall spike at the origin. The approximating functions of the sequence are thus "approximate" or "nascent" delta functions.
Overview
The graph of the delta function is usually thought of as following the whole x-axis and the positive y-axis. (This informal picture can sometimes be misleading, for example in the limiting case of the sinc function.)
Despite its name, the delta function is not truly a function, at least not a usual one with domain in reals. For example, the objects f(x) = δ(x) and g(x) = 0 are equal everywhere except at x = 0 yet have integrals that are different. According to Lebesgue integration theory, if f and g are functions such that f = g almost everywhere, then f is integrable if and only if g is integrable and the integrals of f and g are identical. Rigorous treatment of the Dirac delta requires measure theory, the theory of distributions, or a hyperreal framework.
The Dirac delta is used to model a tall narrow spike function (an impulse), and other similar abstractions such as a point charge, point mass or electron point. For example, to calculate the dynamics of a baseball being hit by a bat, one can approximate the force of the bat hitting the baseball by a delta function. In doing so, one not only simplifies the equations, but one also is able to calculate the motion of the baseball by only considering the total impulse of the bat against the ball rather than requiring knowledge of the details of how the bat transferred energy to the ball.
In applied mathematics, the delta function is often manipulated as a kind of limit (a weak limit) of a sequence of functions, each member of which has a tall spike at the origin: for example, a sequence of Gaussian distributions centered at the origin with variance tending to zero.
An infinitesimal formula for an infinitely tall, unit impulse delta function (infinitesimal version of Cauchy distribution) explicitly appears in an 1827 text of Augustin Louis Cauchy.[4] Siméon Denis Poisson considered the issue in connection with the study of wave propagation as did Gustav Kirchhoff somewhat later. Kirchhoff and Hermann von Helmholtz also introduced the unit impulse as a limit of Gaussians, which also corresponded to Lord Kelvin's notion of a point heat source. At the end of the 19th century, Oliver Heaviside used formal Fourier series to manipulate the unit impulse.[5] The Dirac delta function as such was introduced as a "convenient notation" by Paul Dirac in his influential 1927 book Principles of Quantum Mechanics.[6] He called it the "delta function" since he used it as a continuous analogue of the discrete Kronecker delta.
Definitions
The Dirac delta can be loosely thought of as a function on the real line which is zero everywhere except at the origin, where it is infinite,
and which is also constrained to satisfy the identity
This is merely a heuristic definition. The Dirac delta is not a true function, as no function has the above properties.[6] Moreover there exist descriptions of the delta function which differ from the above conceptualization. For example, sinc(x/a)/a becomes the delta function in the limit as a → 0,[8] yet this function does not approach zero for values of x outside the origin, rather it oscillates between 1/x and −1/x more and more rapidly as a approaches zero.
The Dirac delta function can be rigorously defined either as a distribution or as a measure.
As a measure
One way to rigorously define the delta function is as a measure, which accepts as an argument a subset A of the real line R, and returns δ(A) = 1 if 0 ∈ A, and δ(A) = 0 otherwise.[9] If the delta function is conceptualized as modeling an idealized point mass at 0, then δ(A) represents the mass contained in the set A. One may then define the integral against δ as the integral of a function against this mass distribution. Formally, the Lebesgue integral provides the necessary analytic device. The Lebesgue integral with respect to the measure δ satisfies
for all continuous compactly supported functions ƒ. The measure δ is not absolutely continuous with respect to the Lebesgue measure — in fact, it is a singular measure. Consequently, the delta measure has no Radon–Nikodym derivative — no true function for which the property
holds.[10] As a result, the latter notation is a convenient abuse of notation, and not a standard (Riemann or Lebesgue) integral.
As a probability measure on R, the delta measure is characterized by its cumulative distribution function, which is the unit step function[11]
This means that H(x) is the integral of the cumulative indicator function 1(−∞, x] with respect to the measure δ; to wit,
Thus in particular the integral of the delta function against a continuous function can be properly understood as a Stieltjes integral:[12]
All higher moments of δ are zero. In particular, characteristic function and moment generating function are both equal to one.
As a distribution
In the theory of distributions a generalized function is thought of not as a function itself, but only in relation to how it affects other functions when it is "integrated" against them. In keeping with this philosophy, to define the delta function properly, it is enough to say what the "integral" of the delta function against a sufficiently "good" test function is. If the delta function is already understood as a measure, then the Lebesgue integral of a test function against that measure supplies the necessary integral.
A typical space of test functions consists of all smooth functions on R with compact support. As a distribution, the Dirac delta is a linear functional on the space of test functions and is defined by[13]
-
![\delta[\varphi] = \varphi(0)\,](c/b1c2074d920e293f6ee23fc02130a233.png)
(
for every test function φ.
For δ to be properly a distribution, it must be "continuous" in a suitable sense. In general, for a linear functional S on the space of test functions to define a distribution, it is necessary and sufficient that, for every positive integer N there is an integer MN and a constant CN such that for every test function φ, one has the inequality[14]
With the δ distribution, one has such an inequality (with CN = 1) with MN = 0 for all N. Thus δ is a distribution of order zero. It is, furthermore, a distribution with compact support (the support being {0}).
The delta distribution can also be defined in a number of equivalent ways. For instance, it is the distributional derivative of the Heaviside step function. This means that, for every test function φ, one has
Intuitively, if integration by parts were permitted, then the latter integral should simplify to
and indeed, a form of integration by parts is permitted for the Stieltjes integral, and in that case one does have
In the context of measure theory, the Dirac measure gives rise to a distribution by integration. Conversely, equation (1) defines a Daniell integral on the space of all compactly supported continuous functions φ which, by the Riesz representation theorem, can be represented as the Lebesgue integral of φ with respect to some Radon measure.
Generalizations
The delta function can be defined in n-dimensional Euclidean space Rn as the measure such that
for every compactly supported continuous function ƒ. As a measure, the n-dimensional delta function is the product measure of the 1-dimensional delta functions in each variable separately. Thus, formally, with x = (x1,x2,...,xn), one has[15]
-

(
The delta function can also be defined in the sense of distributions exactly as above in the one-dimensional case.[16] However, despite widespread use in engineering contexts, (2) should be manipulated with care, since the product of distributions can only be defined under quite narrow circumstances.[17]
The notion of a Dirac measure makes sense on any set whatsoever.[9] Thus if X is a set, x0 ∈ X is a marked point, and Σ is any sigma algebra of subsets of X, then the measure defined on sets A ∈ Σ by
is the delta measure or unit mass concentrated at x0.
Another common generalization of the delta function is to a differentiable manifold where most of its properties as a distribution can also be exploited because of the differentiable structure. The delta function on a manifold M centered at the point x0 ∈ M is defined as the following distribution:
-
![\delta_{x_0}[\phi] = \phi(x_0)](b/1eb3281ef2f90360471468f213e873b4.png)
(
for all compactly supported smooth real-valued functions φ on M.[18] A common special case of this construction is when M is an open set in the Euclidean space Rn.
On a locally compact Hausdorff space X, the Dirac delta measure concentrated at a point x is the Radon measure associated with the Daniell integral (3) on compactly supported continuous functions φ. At this level of generality, calculus as such is no longer possible, however a variety of techniques from abstract analysis are available. For instance, the mapping
 is a continuous embedding of X into the space of finite Radon measures on X, equipped with its vague topology. Moreover, the convex hull of the image of X under this embedding is dense in the space of probability measures on X.[19]
is a continuous embedding of X into the space of finite Radon measures on X, equipped with its vague topology. Moreover, the convex hull of the image of X under this embedding is dense in the space of probability measures on X.[19]Properties
Scaling and symmetry
The delta function satisfies the following scaling property for a non-zero scalar α:[20]
and so
-

(
In particular, the delta function is an even distribution, in the sense that
- δ( − x) = δ(x)
which is homogeneous of degree −1.
Algebraic properties
The distributional product of δ with x is equal to zero:
- xδ(x) = 0.
Conversely, if xf(x) = xg(x), where f and g are distributions, then
- f(x) = g(x) + cδ(x)
for some constant c.
Translation
The integral of the time-delayed Dirac delta is given by:
This is sometimes referred to as the sifting property[21] or the sampling property. The delta function is said to "sift out" the value at
 .
.It follows that the effect of convolving a function ƒ(t) with the time-delayed Dirac delta is to time-delay ƒ(t) by the same amount:
-


 (using (4): δ( − x) = δ(x))
(using (4): δ( − x) = δ(x))
This holds under the precise condition that f be a tempered distribution (see the discussion of the Fourier transform below). As a special case, for instance, we have the identity (understood in the distribution sense)
Composition with a function
More generally, the delta distribution may be composed with a smooth function g(x) in such a way that the familiar change of variables formula holds, that
provided that g is a continuously differentiable function with g′ nowhere zero.[22] That is, there is a unique way to assign meaning to the distribution
 so that this identity holds for all compactly supported test functions ƒ. This distribution satisfies δ(g(x)) = 0 if g is nowhere zero, and otherwise if g has a real root at x0, then
so that this identity holds for all compactly supported test functions ƒ. This distribution satisfies δ(g(x)) = 0 if g is nowhere zero, and otherwise if g has a real root at x0, thenIt is natural therefore to define the composition δ(g(x)) for continuously differentiable functions g by
where the sum extends over all roots of g(x), which are assumed to be simple.[22] Thus, for example
In the integral form the generalized scaling property may be written as
Properties in n dimensions
The delta distribution in an n-dimensional space satisfies the following scaling property instead:
so that δ is a homogeneous distribution of degree −n. Under any reflection or rotation ρ, the delta function is invariant:
As in the one-variable case, it is possible to define the composition of δ with a bi-Lipschitz function[23] g : Rn → Rn uniquely so that the identity
for all compactly supported functions ƒ.
Using the coarea formula from geometric measure theory, one can also define the composition of the delta function with a submersion from one Euclidean space to another one of different dimension; the result is a type of current. In the special case of a continuously differentiable function g : Rn → R such that the gradient of g is nowhere zero, the following identity holds[24]
where the integral on the right is over g−1(0), the n−1 dimensional surface defined by g(x) = 0 with respect to the Minkowski content measure. This is known as a simple layer integral.
Fourier transform
The delta function is a tempered distribution, and therefore it has a well-defined Fourier transform. Formally, one finds[25]
Properly speaking, the Fourier transform of a distribution is defined by imposing self-adjointness of the Fourier transform under the duality pairing
 of tempered distributions with Schwartz functions. Thus
of tempered distributions with Schwartz functions. Thus  is defined as the unique tempered distribution satisfying
is defined as the unique tempered distribution satisfyingfor all Schwartz functions φ. And indeed it follows from this that

As a result of this identity, the convolution of the delta function with any other tempered distribution S is simply S:
That is to say that δ is an identity element for the convolution on tempered distributions, and in fact the space of compactly supported distributions under convolution is an associative algebra with identity the delta function. This property is fundamental in signal processing, as convolution with a tempered distribution is a linear time-invariant system, and applying the linear time-invariant system measures its impulse response. The impulse response can be computed to any desired degree of accuracy by choosing a suitable approximation for δ, and once it is known, it characterizes the system completely. See LTI system theory:Impulse response and convolution.
The inverse Fourier transform of the tempered distribution ƒ(ξ) = 1 is the delta function. Formally, this is expressed
and more rigorously, it follows since
for all Schwartz functions ƒ.
In these terms, the delta function provides a suggestive statement of the orthogonality property of the Fourier kernel on R. Formally, one has
This is, of course, shorthand for the assertion that the Fourier transform of the tempered distribution
is
which again follows by imposing self-adjointness of the Fourier transform.
By analytic continuation of the Fourier transform, the Laplace transform of the delta function is found to be[26]
Distributional derivatives
The distributional derivative of the Dirac delta distribution is the distribution δ′ defined on compactly supported smooth test functions φ by[27]
- δ'[φ] = − δ[φ'] = − φ'(0).
The first equality here is a kind of integration by parts, for if δ were a true function then
The kth derivative of δ is defined similarly as the distribution given on test functions by
- δ(k)[φ] = ( − 1)kφ(k)(0).
In particular δ is an infinitely differentiable distribution.
The first derivative of the delta function is the distributional limit of the difference quotients:[28]
More properly, one has
where τh is the translation operator, defined on functions by τhφ(x) = φ(x+h), and on a distribution S by
- (τhS)[φ] = S[τ − hφ].
In the theory of electromagnetism, the first derivative of the delta function represents a point magnetic dipole situated at the origin. Accordingly, it is referred to as a dipole or the doublet function.[29]
The derivative of the delta function satisfies a number of basic properties, including:
- xδ'(x) = − δ(x).
Furthermore, the convolution of δ' with a compactly supported smooth function f is
- δ' * f = δ * f' = f',
which follows from the properties of the distributional derivative of a convolution.
Higher dimensions
More generally, on an open set U in the n-dimensional Euclidean space Rn, the Dirac delta distribution centered at a point a ∈ U is defined by[30]
- δa[ϕ] = ϕ(a)
for all φ ∈ S(U), the space of all smooth compactly supported functions on U. If α = (α1, ..., αn) is any multi-index and ∂α denotes the associated mixed partial derivative operator, then the αth derivative ∂αδa of δa is given by[30]
That is, the αth derivative of δa is the distribution whose value on any test function φ is the αth derivative of φ at a (with the appropriate positive or negative sign).
The first partial derivatives of the delta function are thought of as double layers along the coordinate planes. More generally, the normal derivative of a simple layer supported on a surface is a double layer supported on that surface, and represents a laminar magnetic monopole. Higher derivatives of the delta function are known in physics as multipoles.
Higher derivatives enter into mathematics naturally as the building blocks for the complete structure of distributions with point support. If S is any distribution on U supported on the set {a} consisting of a single point, then there is an integer m and coefficients cα such that[31]
Representations of the delta function
The delta function can be viewed as the limit of a sequence of functions
where ηε(x) is sometimes called a nascent delta function. This limit is meant in a weak sense: either that
-

(
for all continuous functions ƒ having compact support, or that this limit holds for all smooth functions ƒ with compact support. The difference between these two slightly different modes of weak convergence is often subtle: the former is convergence in the vague topology of measures, and the latter is convergence in the sense of distributions.
Approximations to the identity
Typically a nascent delta function ηε can be constructed in the following manner. Let η be an absolutely integrable function on R of total integral 1, and define
In n dimensions, one uses instead the scaling
Then a simple change of variables shows that ηε also has integral 1.[32] One shows easily that (5) holds for all continuous compactly supported functions ƒ, and so ηε converges weakly to δ in the sense of measures. If the initial η = η1 is itself smooth and compactly supported then the sequence is called a mollifier.
The ηε constructed in this way are known as an approximation to the identity.[33] This terminology is because the space L1(R) of absolutely integrable functions is closed under the operation of convolution of functions: ƒ∗g ∈ L1(R) whenever ƒ and g are in L1(R). However, there is no identity in L1(R) for the convolution product: no element h such that ƒ∗h = ƒ for all ƒ. Nevertheless, the sequence ηε does approximate such an identity in the sense that
This limit holds in the sense of mean convergence (convergence in L1). Further conditions on the ηε, for instance that it be a mollifier associated to a compactly supported function,[34] are needed to ensure pointwise convergence almost everywhere.
The standard mollifier is given by Ψ(x/ε)/ε where Ψ is a suitably normalized bump function. For instance,
where
In some situations such as numerical analysis, a piecewise linear approximation to the identity is desirable. This can be obtained by taking η1 to be a hat function. With this choice of η1, one has
- ηε(x) = ε − 1max(1 − | x / ε | ,0)
which are all continuous and compactly supported, although not smooth and so not a mollifier.
Probabilistic considerations
In the context of probability theory, it is natural to impose the additional condition that the initial η1 in an approximation to the identity should be positive, as such a function then represents a probability distribution. Convolution with a probability distribution is sometimes favorable because it does not result in overshoot or undershoot, as the output is a convex combination of the input values, and thus falls between the maximum and minimum of the input function. Taking η1 to be any probability distribution at all, and letting ηε(x) = η1(x/ε)/ε as above will give rise to an approximation to the identity. In general this converges more rapidly to a delta function if, in addition, η has mean 0 and has small higher moments. For instance, if η1 is the uniform distribution on [−1/2, 1/2], also known as the rectangular function, then setting
 with n a new parameter:[35]
with n a new parameter:[35]Another example is with the Wigner semicircle distribution
This is continuous and compactly supported, but not a mollifier because it is not smooth.
Semigroups
Nascent delta functions often arise as convolution semigroups. This amounts to the further constraint that the convolution of ηε with ηδ must satisfy
- ηε * ηδ = ηε + δ
for all ε,δ > 0. Convolution semigroups in L1 that form a nascent delta function are always an approximation to the identity in the above sense, however the semigroup condition is quite a strong restriction.
In practice, semigroups approximating the delta function arise as fundamental solutions or Green's functions to physically motivated elliptic or parabolic partial differential equations. In the context of applied mathematics, semigroups arise as the output of a linear time-invariant system. Abstractly, if A is a linear operator acting on functions of x, then a convolution semigroup arises by solving the initial value problem
in which the limit is as usual understood in the weak sense. Setting ηε(x) = η(ε,x) gives the associated nascent delta function.
Some examples of physically important convolution semigroups arising from such a fundamental solution include the following.
- The heat kernel
The heat kernel, defined by
represents the temperature in an infinite wire at time t > 0, if a unit of heat energy is stored at the origin of the wire at time t = 0. This semigroup evolves according to the one-dimensional heat equation:
In probability theory, ηε(x) is a normal distribution of variance ε and mean 0. It represents the probability density at time t = ε of the position of a particle starting at the origin following a standard Brownian motion. In this context, the semigroup condition is then an expression of the Markov property of Brownian motion.
In higher dimensional Euclidean space Rn, the heat kernel is
and has the same physical interpretation, mutatis mutandis. It also represents a nascent delta function in the sense that ηε → δ in the distribution sense as ε → 0.
- The Poisson kernel
The Poisson kernel
is the fundamental solution of the Laplace equation in the upper half-plane.[36] It represents the electrostatic potential in a semi-infinite plate whose potential along the edge is held at fixed at the delta function. The Poisson kernel is also closely related to the Cauchy distribution. This semigroup evolves according to the equation
where the operator is rigorously defined as the Fourier multiplier
Oscillatory integrals
In areas of physics such as wave propagation and wave mechanics, the equations involved are hyperbolic and so may have more singular solutions. As a result, the nascent delta functions that arise as fundamental solutions of the associated Cauchy problems are generally oscillatory integrals. An example, which comes from a solution of the Euler–Tricomi equation of transonic gas dynamics,[37] is the rescaled Airy function
Although using the Fourier transform, it is easy to see that this generates a semigroup in some sense, it is not absolutely integrable and so cannot define a semigroup in the above strong sense. Many nascent delta functions constructed as oscillatory integrals only converge in the sense of distributions (an example is the Dirichlet kernel below), rather than in the sense of measures.
Another example is the Cauchy problem for the wave equation in R1+1:[38]
The solution u represents the displacement from equilibrium of an infinite elastic string, with an initial disturbance at the origin.
Other approximations to the identity of this kind include the sinc function
and the Bessel function
Plane wave decomposition
One approach to the study of a linear partial differential equation
where L is a differential operator on Rn, is to seek first a fundamental solution, which is a solution of the equation
When L is particularly simple, this problem can often be resolved using the Fourier transform directly (as in the case of the Poisson kernel and heat kernel already mentioned). For more complicated operators, it is sometimes easier first to consider an equation of the form
where h is a plane wave function, meaning that it has the form
for some vector ξ. Such an equation can be resolved (if the coefficients of L are analytic functions) by the Cauchy–Kovalevskaya theorem or (if the coefficients of L are constant) by quadrature. So, if the delta function can be decomposed into plane waves, then one can in principle solve linear partial differential equations.
Such a decomposition of the delta function into plane waves was part of a general technique first introduced essentially by Johann Radon, and then developed in this form by Fritz John (1955).[39] Choose k so that n + k is an even integer, and for a real number s, put
Then δ is obtained by applying a power of the Laplacian to the integral with respect to the unit sphere measure dω of g(x·ξ) for ξ in the unit sphere Sn−1:
The Laplacian here is interpreted as a weak derivative, so that this equation is taken to mean that, for any test function φ,
The result follows from the formula for the Newtonian potential (the fundamental solution of Poisson's equation). This is essentially a form of the inversion formula for the Radon transform, because it recovers the value of φ(x) from its integrals over hyperplanes. For instance, if n is odd and k = 1, then the integral on the right hand side is
where Rφ(ξ,p) is the Radon transform of φ:
An alternative equivalent expression of the plane wave decomposition, from Gel'fand & Shilov (1966–1968, I, §3.10), is
for n even, and
for n odd.
Fourier kernels
See also: Convergence of Fourier seriesIn the study of Fourier series, a major question consists of determining whether and in what sense the Fourier series associated with a periodic function converges to the function. The nth partial sum of the Fourier series of a function ƒ of period 2π is defined by convolution (on the interval [−π,π]) with the Dirichlet kernel:
Thus,
where
A fundamental result of elementary Fourier series states that the Dirichlet kernel tends to the a multiple of the delta function as N → ∞. This is interpreted in the distribution sense, that
for every compactly supported smooth function ƒ. Thus, formally one has
on the interval [−π,π].
In spite of this, the result does not hold for all compactly supported continuous functions: that is DN does not converge weakly in the sense of measures. The lack of convergence of the Fourier series has led to the introduction of a variety of summability methods in order to produce convergence. The method of Cesàro summation leads to the Fejér kernel[40]
The Fejér kernels tend to the delta function in a stronger sense that[41]
for every compactly supported continuous function ƒ. The implication is that the Fourier series of any continuous function is Cesàro summable to the value of the function at every point.
Hilbert space theory
The Dirac delta distribution is a densely defined unbounded linear functional on the Hilbert space L2 of square integrable functions. Indeed, smooth compactly support functions are dense in L2, and the action of the delta distribution on such functions is well-defined. In many applications, it is possible to identify subspaces of L2 and to give a stronger topology on which the delta function defines a bounded linear functional.
- Sobolev spaces
The Sobolev embedding theorem for Sobolev spaces on the real line R implies that any square-integrable function ƒ such that
is automatically continuous, and satisfies in particular
Thus δ is a bounded linear functional on the Sobolev space H1. Equivalently δ is an element of the continuous dual space H−1 of H1. More generally, in n dimensions, one has δ ∈ H −s(Rn) provided s > n / 2.
- Spaces of holomorphic functions
In complex analysis, the delta function enters via Cauchy's integral formula which asserts that if D is a domain in the complex plane with smooth boundary, then
for all holomorphic functions ƒ in D that are continuous on the closure of D. As a result, the delta function δz is represented on this class of holomorphic functions by the Cauchy integral:
More generally, let H2(∂D) be the Hardy space consisting of the closure in L2(∂D) of all holomorphic functions in D continuous up to the boundary of D. Then functions in H2(∂D) uniquely extend to holomorphic functions in D, and the Cauchy integral formula continues to hold. In particular for z ∈ D, the delta function δz is a continuous linear functional on H2(∂D). This is a special case of the situation in several complex variables in which, for smooth domains D, the Szegő kernel plays the role of the Cauchy integral.
- Resolutions of the identity
Given a complete orthonormal basis set of functions {φn} in a separable Hilbert space, for example, the normalized eigenvectors of a compact self-adjoint operator, any vector f can be expressed as:
The coefficients {αn} are found as:
which may be represented by the notation:
a form of the bra-ket notation of Dirac.[42] Adopting this notation, the expansion of f takes the dyadic form:[43]
Letting I denote the identity operator on the Hilbert space, the expression
is called a resolution of the identity. When the Hilbert space is the space L2(D) of square-integrable functions on a domain D, the quantity:
is an integral operator, and the expression for f can be rewritten as:
The right-hand side converges to f in the L2 sense. It need not hold in a pointwise sense, even when f is a continuous function. Nevertheless, it is common to abuse notation and write
resulting in the representation of the delta function:[44]
With a suitable rigged Hilbert space (Φ,L2(D),Φ∗) where Φ ⊂ L2(D) contains all compactly supported smooth functions, this summation may converge in Φ*, depending on the properties of the basis φn. In most cases of practical interest, the orthonormal basis comes from an integral or differential operator, in which case the series converges in the distribution sense.[45]
Infinitesimal delta functions
Cauchy used an infinitesimal α to write down a unit impulse, infinitely tall and narrow Dirac-type delta function δα satisfying
 in a number of articles in 1827.[46] Cauchy defined an infinitesimal in Cours d'Analyse (1827) in terms of a sequence tending to zero. Namely, such a null sequence becomes an infinitesimal in Cauchy's and Lazare Carnot's terminology.
in a number of articles in 1827.[46] Cauchy defined an infinitesimal in Cours d'Analyse (1827) in terms of a sequence tending to zero. Namely, such a null sequence becomes an infinitesimal in Cauchy's and Lazare Carnot's terminology.Modern set-theoretic approaches allow one to define infinitesimals via the ultrapower construction, where a null sequence becomes an infinitesimal in the sense of an equivalence class modulo a relation defined in terms of a suitable ultrafilter. The article by Yamashita (2007) contains a bibliography on modern Dirac delta functions in the context of an infinitesimal-enriched continuum provided by the hyperreals.
Dirac comb
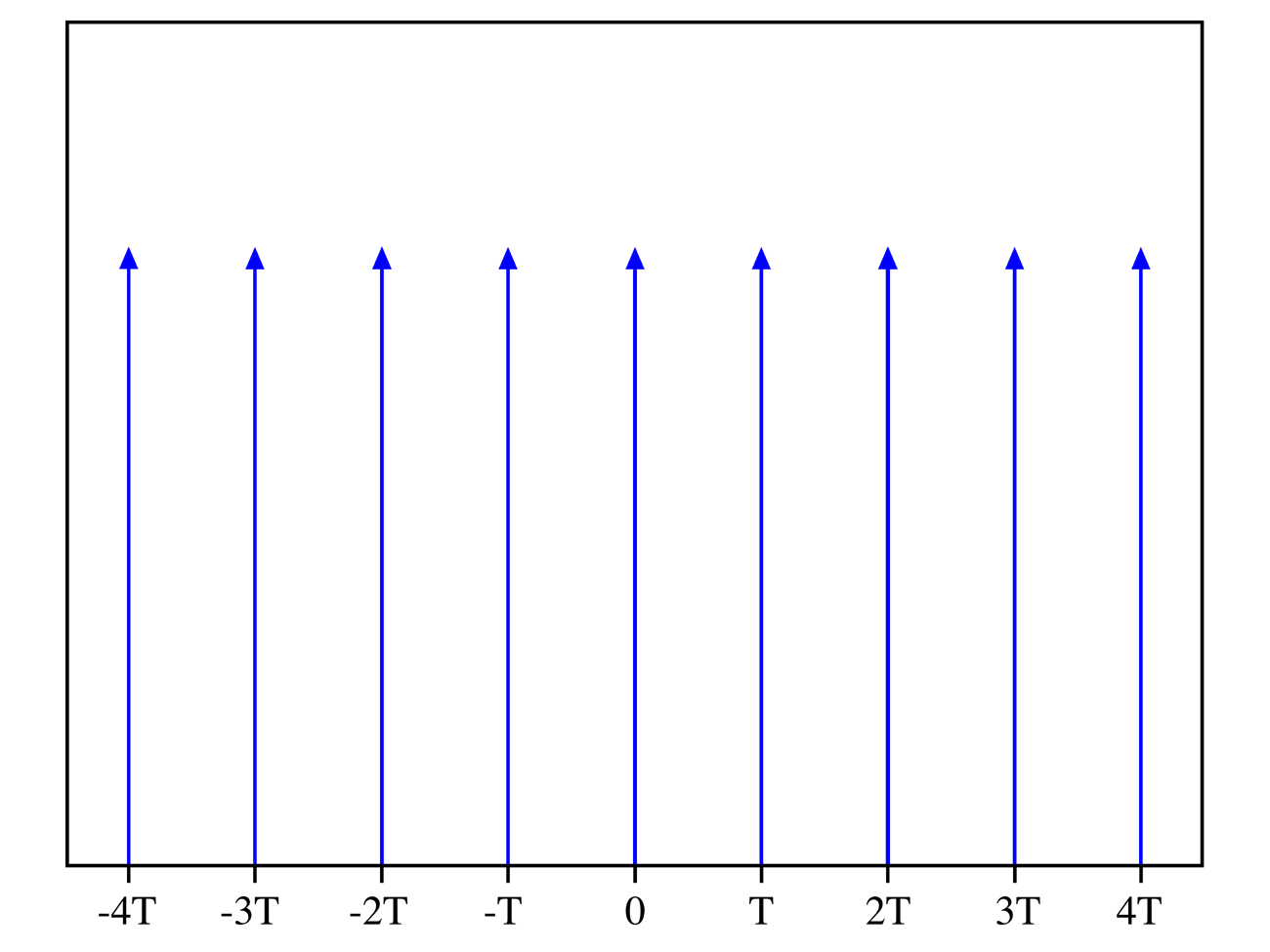
Main article: Dirac comb A Dirac comb is an infinite series of Dirac delta functions spaced at intervals of T
A Dirac comb is an infinite series of Dirac delta functions spaced at intervals of TA so-called uniform "pulse train" of Dirac delta measures, which is known as a Dirac comb, or as the Shah distribution, creates a sampling function, often used in digital signal processing (DSP) and discrete time signal analysis. The Dirac comb is given as the infinite sum, whose limit is understood in the distribution sense,
which is a sequence of point masses at each of the integers.
Up to an overall normalizing constant, the Dirac comb is equal to its own Fourier transform. This is significant because if ƒ is any Schwartz function, then the periodization of ƒ is given by the convolution
In particular,
is precisely the Poisson summation formula.[47]
Sokhatsky–Weierstrass theorem
The Sokhatsky–Weierstrass theorem, important in quantum mechanics, relates the delta function to the distribution p.v.1/x, the Cauchy principal value of the function 1/x, defined by
Sokhatsky's formula states that[48]
Here the limit is understood in the distribution sense, that for all compactly supported smooth functions f,
Relationship to the Kronecker delta
The Kronecker delta δij is the quantity defined by
for all integers i, j. This function then satisfies the following analog of the sifting property: if
 be any doubly infinite sequence, then
be any doubly infinite sequence, thenSimilarly, for any real or complex valued continuous function f on
 , the Dirac delta satisfies the sifting property
, the Dirac delta satisfies the sifting propertyThis exhibits the Kronecker delta function as a discrete analog of the Dirac delta function.[49]
Applications to probability theory
In probability theory and statistics, the Dirac delta function is often used to represent a discrete distribution, or a partially discrete, partially continuous distribution, using a probability density function (which is normally used to represent fully continuous distributions). For example, the probability density function
 of a discrete distribution consisting of points
of a discrete distribution consisting of points  , with corresponding probabilities
, with corresponding probabilities  , can be written as
, can be written asAs another example, consider a distribution which 6/10 of the time returns a standard normal distribution, and 4/10 of the time returns exactly the value 3.5 (i.e. a partly continuous, partly discrete mixture distribution). The density function of this distribution can be written as
The delta function is also used in a completely different way to represent the local time of a diffusion process (like Brownian motion). The local time of a stochastic process B(t) is given by
and represents the amount of time that the process spends at the point x in the range of the process. More precisely, in one dimension this integral can be written
where
![\mathbf{1}_{[x-\epsilon,x+\epsilon]}](6/a064e82bb3c7c5d96a79aa3224eff809.png) is the indicator function of the interval [x−ε,x+ε].
is the indicator function of the interval [x−ε,x+ε].Application to quantum mechanics
We give an example of how the delta function is expedient in quantum mechanics. The wave function of a particle gives the probability amplitude of finding a particle within a given region of space. Wave functions are assumed to be elements of the Hilbert space L2 of square-integrable functions, and the total probability of finding a particle within a given interval is the integral of the magnitude of the wave function squared over the interval. A set {φn} of wave functions is orthonormal if they are normalized by
where δ here refers to the Kronecker delta. A set of orthonormal wave functions is complete in the space of square-integrable functions if any wave function ψ can be expressed as a combination of the φn:
with
 . Complete orthonormal systems of wave functions appear naturally as the eigenfunctions of the Hamiltonian (of a bound system) in quantum mechanics that measures the energy levels, which are called the eigenvalues. The set of eigenvalues, in this case, is known as the spectrum of the Hamiltonian. In bra-ket notation, as above, this equality implies the resolution of the identity:
. Complete orthonormal systems of wave functions appear naturally as the eigenfunctions of the Hamiltonian (of a bound system) in quantum mechanics that measures the energy levels, which are called the eigenvalues. The set of eigenvalues, in this case, is known as the spectrum of the Hamiltonian. In bra-ket notation, as above, this equality implies the resolution of the identity:Here the eigenvalues are assumed to be discrete, but the set of eigenvalues of an observable may be continuous rather than discrete. An example is the position observable, Qψ(x) = xψ(x). The spectrum of the position (in one dimension) is the entire real line, and is called a continuous spectrum. However, unlike the Hamiltonian, the position operator lacks proper eigenfunctions. The conventional way to overcome this shortcoming is to widen the class of available functions by allowing distributions as well: that is, to replace the Hilbert space of quantum mechanics by an appropriate rigged Hilbert space.[50] In this context, the position operator has a complete set of eigen-distributions, labeled by the points y of the real line, given by
The eigenfunctions of position are denoted by
 in Dirac notation, and are known as position eigenstates.
in Dirac notation, and are known as position eigenstates.Similar considerations apply to the eigenstates of the momentum operator, or indeed any other self-adjoint unbounded operator P on the Hilbert space, provided the spectrum of P is continuous and there are no degenerate eigenvalues. In that case, there is a set Ω of real numbers (the spectrum), and a collection φy of distributions indexed by the elements of Ω, such that
That is, φy are the eigenvectors of P. If the eigenvectors are normalized so that
in the distribution sense, then for any test function ψ,
where
That is, as in the discrete case, there is a resolution of the identity
where the operator-valued integral is again understood in the weak sense. If the spectrum of P has both continuous and discrete parts, then the resolution of the identity involves a summation over the discrete spectrum and an integral over the continuous spectrum.
The delta function also has many more specialized applications in quantum mechanics, such as the delta potential models for a single and double potential well.
Application to structural mechanics
The delta function can be used in structural mechanics to describe transient loads or point loads acting on structures. The governing equation of a simple mass-spring system excited by a sudden force impulse I at time t = 0 can be written
where m is the mass, ξ the deflection and k the spring constant.
As another example, the equation governing the static deflection of a slender beam is, according to Euler-Bernoulli theory,
where EI is the bending stiffness of the beam, w the deflection, x the spatial coordinate and q(x) the load distribution. If a beam is loaded by a point force F at x = x0, the load distribution is written
As integration of the delta function results in the Heaviside step function, it follows that the static deflection of a slender beam subject to multiple point loads is described by a set of piecewise polynomials.
Also a point moment acting on a beam can be described by delta functions. Consider two opposing point forces F at a distance d apart. They then produce a moment M = Fd acting on the beam. Now, let the distance d approach the limit zero, while M is kept constant. The load distribution, assuming a clockwise moment acting at x = 0, is written
Point moments can thus be represented by the derivative of the delta function. Integration of the beam equation again results in piecewise polynomial deflection.
See also
Notes
- ^ Dirac 1958, §15 The δ function, p. 58
- ^ Gel'fand & Shilov 1968, Volume I, §§1.1, 1.3
- ^ Vladimirov 1971, §5.1
- ^ Laugwitz 1989, p. 230
- ^ A more complete historical account can be found in van der Pol & Bremmer 1987, §V.4.
- ^ a b Dirac 1958, §15
- ^ Gel'fand & Shilov 1968, Volume I, §1.1, p. 1
- ^ Weisstein, Eric W., "Delta Function" from MathWorld.
- ^ a b Rudin 1966, §1.20
- ^ Hewitt & Stromberg 1963, §19.61
- ^ Driggers 2003, p. 2321. See also Bracewell 1986, Chapter 5 for a different interpretation. Other conventions for the assigning the value of the Heaviside function at zero exist, and some of these are not consistent with what follows.
- ^ Hewitt & Stromberg 1965, §9.19
- ^ Strichartz 1994, §2.2
- ^ Hörmander 1983, Theorem 2.1.5
- ^ Bracewell 1986, Chapter 5
- ^ Hörmander 1983, §3.1
- ^ Strichartz 1994, §2.3; Hörmander 1983, §8.2
- ^ Dieudonné 1972, §17.3.3
- ^ Federer 1969, §2.5.19
- ^ Strichartz 1994, Problem 2.6.2
- ^ Weisstein, Eric W., "Sifting Property" from MathWorld.
- ^ a b Gel'fand & Shilov 1966–1968, Vol. 1, §II.2.5
- ^ Further refinement is possible, namely to submersions, although these require a more involved change of variables formula.
- ^ Hörmander 1983, §6.1
- ^ In some conventions for the Fourier transform.
- ^ Bracewell 1986
- ^ Gel'fand & Shilov 1966, p. 26
- ^ Gel'fand & Shilov 1966, §2.1
- ^ Weisstein, Eric W., "Doublet Function" from MathWorld.
- ^ a b Hörmander 1983, p. 56
- ^ Hörmander 1983, p. 56; Rudin 1991, Theorem 6.25
- ^ Stein Weiss, Theorem 1.18
- ^ Rudin 1991, §II.6.31
- ^ More generally, one only needs η = η1 to have an integrable radially symmetric decreasing rearrangement.
- ^ Aratyn & Rasinariu 2006, §5.3.1 Dirac delta function, p. 314
- ^ Stein & Weiss 1971, §I.1
- ^ Vallée & Soares 2004, §7.2
- ^ Hörmander 1983, §7.8
- ^ See also Courant & Hilbert 1962, §14.
- ^ Lang 1997, p. 312
- ^ In the terminology of Lang (1997), the Fejér kernel is a Dirac sequence, whereas the Dirichlet kernel is not.
- ^ The development of this section in bra-ket notation is found in (Levin 2002, Coordinate-space wave functions and completeness, pp.=109ff)
- ^ Davis & Thomson 2000, Perfect operators, p.344
- ^ Davis & Thomson 2000, Equation 8.9.11, p. 344
- ^ de la Madrid, Bohm & Gadella 2002
- ^ See Laugwitz (1989).
- ^ Córdoba 1988; Hörmander 1983, §7.2
- ^ Vladimirov 1971, §5.7
- ^ Hartmann 1997, pp. 154–155
- ^ Isham 1995, §6.2
References
- Aratyn, Henrik; Rasinariu, Constantin (2006), A short course in mathematical methods with Maple, World Scientific, ISBN 9812564616, http://books.google.com/?id=JFmUQGd1I3IC&pg=PA314.
- Bracewell, R. (1986), The Fourier Transform and Its Applications (2nd ed.), McGraw-Hill.
- Córdoba, A., "La formule sommatoire de Poisson", C.R. Acad. Sci. Paris, Series I 306: 373–376.
- Courant, Richard; Hilbert, David (1962), Methods of Mathematical Physics, Volume II, Wiley-Interscience.
- Davis, Howard Ted; Thomson, Kendall T (2000), Linear algebra and linear operators in engineering with applications in Mathematica, Academic Press, ISBN 012206349X, http://books.google.com/?id=3OqoMFHLhG0C&pg=PA344#v=onepage&q
- Dieudonné, Jean (1976), Treatise on analysis. Vol. II, New York: Academic Press [Harcourt Brace Jovanovich Publishers], ISBN 978-0-12-215502-4, MR0530406.
- Dieudonné, Jean (1972), Treatise on analysis. Vol. III, Boston, MA: Academic Press, MR0350769
- Dirac, Paul (1958), Principles of quantum mechanics (4th ed.), Oxford at the Clarendon Press, ISBN 978-0198520115.
- Driggers, Ronald G. (2003), Encyclopedia of Optical Engineering, CRC Press, ISBN 978-0824709402.
- Federer, Herbert (1969), Geometric measure theory, Die Grundlehren der mathematischen Wissenschaften, 153, New York: Springer-Verlag, pp. xiv+676, ISBN 978-3540606567, MR0257325.
- Gel'fand, I.M.; Shilov, G.E. (1966–1968), Generalized functions, 1–5, Academic Press.
- Hartman, William M. (1997), Signals, sound, and sensation, Springer, ISBN 9781563962837, http://books.google.com/books?id=3N72rIoTHiEC.
- Hewitt, E; Stromberg, K (1963), Real and abstract analysis, Springer-Verlag.
- Hörmander, L. (1983), The analysis of linear partial differential operators I, Grundl. Math. Wissenschaft., 256, Springer, ISBN 3-540-12104-8, MR0717035.
- Isham, C. J. (1995), Lectures on quantum theory: mathematical and structural foundations, Imperial College Press, ISBN 9788177641905.
- John, Fritz (1955), Plane waves and spherical means applied to partial differential equations, Interscience Publishers, New York-London, MR0075429.
- Lang, Serge (1997), Undergraduate analysis, Undergraduate Texts in Mathematics (2nd ed.), Berlin, New York: Springer-Verlag, ISBN 978-0-387-94841-6, MR1476913.
- Laugwitz, D. (1989), "Definite values of infinite sums: aspects of the foundations of infinitesimal analysis around 1820", Arch. Hist. Exact Sci. 39 (3): 195–245, doi:10.1007/BF00329867.
- Levin, Frank S. (2002), "Coordinate-space wave functions and completeness", An introduction to quantum theory, Cambridge University Press, pp. 109ff, ISBN 0521598419, http://books.google.com/?id=oc64f4EspFgC&pg=PA109
- Li, Y. T.; Wong, R. (2008), "Integral and series representations of the Dirac delta function", Commun. Pure Appl. Anal. 7 (2): 229–247, doi:10.3934/cpaa.2008.7.229, MR2373214.
- de la Madrid, R.; Bohm, A.; Gadella, M. (2002), "Rigged Hilbert Space Treatment of Continuous Spectrum", Fortschr. Phys. 50 (2): 185–216, arXiv:quant-ph/0109154, doi:10.1002/1521-3978(200203)50:2<185::AID-PROP185>3.0.CO;2-S.
- McMahon, D. (2005-11-22), "An Introduction to State Space", Quantum Mechanics Demystified, A Self-Teaching Guide, Demystified Series, New York: McGraw-Hill, pp. 108, doi:10.1036/0071455469, ISBN 0-07-145546-9, http://www.mhprofessional.com/product.php?isbn=0071455469&cat=&promocode=, retrieved 2008-03-17.
- van der Pol, Balth.; Bremmer, H. (1987), Operational calculus (3rd ed.), New York: Chelsea Publishing Co., ISBN 978-0-8284-0327-6, MR904873.
- Rudin, W. (1991), Functional Analysis (2nd ed.), McGraw-Hill, ISBN 0-07-054236-8.
- Soares, Manuel; Vallée, Olivier (2004), Airy functions and applications to physics, London: Imperial College Press.
- Saichev, A I; Woyczyński, Wojbor Andrzej (1997), "Chapter1: Basic definitions and operations", Distributions in the Physical and Engineering Sciences: Distributional and fractal calculus, integral transforms, and wavelets, Birkhäuser, ISBN 0817639241, http://books.google.com/?id=42I7huO-hiYC&pg=PA3
- Schwartz, L. (1950–1951), Théorie des distributions, 1–2, Hermann.
- Stein, Elias; Weiss, Guido (1971), Introduction to Fourier Analysis on Euclidean Spaces, Princeton University Press, ISBN 0-691-08078-X.
- Strichartz, R. (1994), A Guide to Distribution Theory and Fourier Transforms, CRC Press, ISBN 0849382734.
- Vladimirov, V. S. (1971), Equations of mathematical physics, Marcel Dekker, ISBN 0-8247-1713-9.
- Weisstein, Eric W., "Delta Function" from MathWorld.
- Yamashita, H. (2006), "Pointwise analysis of scalar fields: A nonstandard approach", Journal of Mathematical Physics 47 (9): 092301, Bibcode 2006JMP....47i2301Y, doi:10.1063/1.2339017
- Yamashita, H. (2007), "Comment on "Pointwise analysis of scalar fields: A nonstandard approach" [J. Math. Phys. 47, 092301 (2006)]", Journal of Mathematical Physics 48 (8): 084101, Bibcode 2007JMP....48h4101Y, doi:10.1063/1.2771422
External links
- KhanAcademy.org video lesson
- The Dirac Delta function, a tutorial on the Dirac delta function.
- Video Lectures - Lecture 23, a lecture by Arthur Mattuck.
- Dirac Delta Function on PlanetMath
- The Dirac delta measure is a hyperfunction
- We show the existence of a unique solution and analyze a finite element approximation when the source term is a Dirac delta measure
- Non-Lebesgue measures on R. Lebesgue-Stieltjes measure, Dirac delta measure.
Infinitesimals History Adequality · Infinitesimal calculus · Leibniz's notation · Integral sign · Criticism of non-standard analysis · The Analyst · The Method of Mechanical Theorems · Cavalieri's principleRelated branches of mathematics Formalizations of infinitesimal quantities Individual concepts Standard part function · Transfer principle · Hyperinteger · Increment theorem · Monad · Internal set · Levi-Civita field · Hyperfinite set · Law of Continuity · OverspillScientists Infinitesimals in physics and engineering Textbooks Analyse des Infiniment Petits · Elementary CalculusCategories:- Non-standard analysis
- History of calculus
- Fourier analysis
- Generalized functions
- Measure theory
- Digital signal processing






![H(x) = \int_{\mathbb{R}}\mathbf{1}_{(-\infty,x]}(t)\,\delta\{dt\} = \delta(-\infty,x].](a/57ac65d79872a397e1478303b8a014c6.png)

![|S[\phi]| \le C_N \sum_{k=0}^{M_N}\sup_{x\in [-N,N]}|\phi^{(k)}(x)|.](0/030ace79cd564b4f45e9d7083e118018.png)
![\delta[\phi] = -\int_{-\infty}^\infty \phi'(x)H(x)\, dx.](c/49c836b66863ded1069bba1f2c224c2c.png)










![\delta(x^2-\alpha^2) = \frac{1}{2|\alpha|}[\delta(x+\alpha)+\delta(x-\alpha)]](4/bb4362e21ccbe184e649420b70158150.png)










![\int_{-\infty}^\infty e^{i 2\pi \xi_1 t} \left[e^{i 2\pi \xi_2 t}\right]^*\,dt = \int_{-\infty}^\infty e^{-i 2\pi (\xi_2 - \xi_1) t} \,dt = \delta(\xi_1 - \xi_2).](8/d68f7cefb61fc55c5e9c8a558bfd9b95.png)























 = |2\pi\xi|\mathcal{F}f(\xi).](7/6571a41160f349c6e42ac3fcaa5fe6ea.png)




![L[u]=f,\,](9/1892330c3bf4359ba7d85f5477cd1dc5.png)
![L[u]=\delta.\,](9/5b90740ee993fff2fc4ab43ea58ea0f5.png)
![L[u]=h\,](4/d5479eae1f42c7bce59de2431206a266.png)

![g(s) = \operatorname{Re}\left[\frac{-s^k\log(-is)}{k!(2\pi i)^n}\right]=\begin{cases}
\frac{|s|^k}{4k!(2\pi i)^{n-1}}&n \text{ odd}\\
&\\
-\frac{|s|^k\log|s|}{k!(2\pi i)^{n}}&n \text{ even.}
\end{cases}](d/b6dce2d3baedf609f21c0d4686ed9067.png)














![\delta[f]=|f(0)| < C \|f\|_{H^1}.](4/d041f4205de07df754884b550badb5ba.png)

![\delta_z[f] = f(z) = \frac{1}{2\pi i} \oint_{\partial D} \frac{f(\zeta)\,d\zeta}{\zeta-z}.](9/b791831a2283ea47b3ee2a7a27ecea0e.png)





















![\ell(x,t) = \lim_{\epsilon\to 0^+}\frac{1}{2\epsilon}\int_0^t \mathbf{1}_{[x-\epsilon,x+\epsilon]}(B(s))\,ds](7/4a7abf9ff3089e931cdfe033a6139243.png)













Wikimedia Foundation. 2010.