- Open set
-
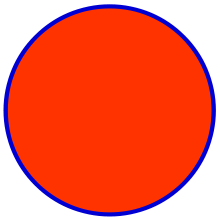 Example: The points (x, y) satisfying x2 + y2 = r2 are colored blue. The points (x, y) satisfying x2 + y2 < r2 are colored red. The red points form an open set. The blue points form a closed set. The union of the red and blue points is a closed set.
Example: The points (x, y) satisfying x2 + y2 = r2 are colored blue. The points (x, y) satisfying x2 + y2 < r2 are colored red. The red points form an open set. The blue points form a closed set. The union of the red and blue points is a closed set.
The concept of an open set is fundamental to many areas of mathematics, especially point-set topology and metric topology. Intuitively speaking, a set U is open if any point x in U can be "moved" a small amount in any direction and still be in the set U. The notion of an open set provides a fundamental way to speak of nearness of points in a topological space, without explicitly having a concept of distance defined. Concepts that use notions of nearness, such as the continuity of functions, can be translated into the language of open sets.
In point-set topology, open sets are used to distinguish between points and subsets of a space. The degree to which any two points can be separated is specified by the separation axioms. The collection of all open sets in a space defines the topology of the space. Functions from one topological space to another that preserve the topology are the continuous functions. Although open sets and the topologies that they comprise are of central importance in point-set topology, they are also used as an organizational tool in other important branches of mathematics. Examples of topologies include the Zariski topology in algebraic geometry that reflects the algebraic nature of varieties, and the topology on a differential manifold in differential topology where each point within the space is contained in an open set that is homeomorphic to an open ball in a finite-dimensional Euclidean space.
Point-set topology is the area of mathematics concerned with general topological spaces, and the relations between them. In the category of topological spaces, morphisms are continuous functions between topological spaces. Continuous functions are readily observed to preserve topological structure, as they map "points close together" to "points close together"; that is, they preserve the structure of open sets defined on the space.
In metric topology, one can concretely define a distance function between two points, and thus metric spaces also have a topology, i.e. a certain structure of open sets defined on them. Thus, as opposed to the pure topological invariants, metric topology deals with isometries and the like; that is, distance preserving maps. In this case, the idea of an open set is used as an organizational tool rather than an object of study. From the topological point of view, metric spaces are fairly well understood, although many open problems still remain in metrizability theory.
Contents
Motivation
Intuitively, an open set provides a method to distinguish two points. For example, if about one point in a topological space there exists an open set not containing another (distinct) point, the two points are referred to as topologically distinguishable. In this manner, one may speak of whether two subsets of a topological space are "near" without concretely defining a metric on the topological space. Therefore, topological spaces may be seen as a generalization of metric spaces.
In the set of all real numbers, one has the natural Euclidean metric; that is, a function which measures the distance between two real numbers: d(x, y) = |x - y|. Therefore, given a real number, one can speak of the set of all points close to that real number; that is, within ε of that real number (refer to this real number as x). In essence, points within ε of x approximate x to an accuracy of degree ε. Note that ε > 0 always but as ε becomes smaller and smaller, one obtains points that approximate x to a higher and higher degree of accuracy. For example, if x = 0 and ε = 1, the points within ε of x are precisely the points of the interval (-1, 1); that is, the set of all real numbers between -1 and 1. However, with ε = 0.5, the points within ε of x are precisely the points of (-0.5, 0.5). Clearly, these points approximate x to a greater degree of accuracy compared to when ε = 1.
The previous discussion shows, for the case x = 0, that one may approximate x to higher and higher degrees of accuracy by defining ε to be smaller and smaller. In particular sets of the form (-ε, ε) give us a lot of information about points close to x = 0. Thus, rather than speaking of a concrete Euclidean metric, one may use sets to describe points close to x. This innovative idea has far-reaching consequences; in particular, by defining different collections of sets containing 0 (distinct from the sets (-ε, ε)), one may find different results regarding the distance between 0 and other real numbers. For example, if we were to define R as the only such set for "measuring distance", all points are close to 0 since there is only one possible degree of accuracy one may achieve in approximating 0: being a member of R. Thus, we find that in some sense, every real number is distance 0 away from 0! It may help in this case to think of the measure as being a binary condition, all things in R are equally close to 0, while any item that is not in R is not close to 0.
In general, one refers to the family of sets containing 0, used to approximate 0, as a neighborhood basis; a member of this neighborhood basis is referred to as an open set. In fact, one may generalize these notions to an arbitrary set (X); rather than just the real numbers. In this case, given a point (x) of that set, one may define a collection of sets "around" (that is, containing) x, used to approximate x. Of course, this collection would have to satisfy certain properties (known as axioms) for otherwise we may not have a well-defined method to measure distance. For example, every point in X should approximate x to some degree of accuracy. Thus X should be in this family. Once we begin to define "smaller" sets containing x, we tend to approximate x to a greater degree of accuracy. Bearing this in mind, one may define the remaining axioms that the family of sets about x is required to satisfy.
Definitions
The concept of open sets can be formalized with various degrees of generality, for example:
Euclidean space
A subset U of the Euclidean n-space Rn is called open if, given any point x in U, there exists a real number ε > 0 such that, given any point y in Rn whose Euclidean distance from x is smaller than ε, y also belongs to U. Equivalently, a subset U of Rn is open if every point in U has a neighborhood in Rn contained in U.
Metric spaces
A subset U of a metric space (M, d) is called open if, given any point x in U, there exists a real number ε > 0 such that, given any point y in M with d(x, y) < ε, y also belongs to U. Equivalently, U is open if every point in U has a neighbourhood contained in U.
This generalises the Euclidean space example, since Euclidean space with the Euclidean distance is a metric space.
Topological spaces
If a nonempty set X is a topological space with topology T, then any member of T is an open set.
Note that infinite intersections of open sets need not be open. For example, the intersection of all intervals of the form (−1/n, 1/n), where n is a positive integer, is the set {0} which is not open in the real line. Sets that can be constructed as the intersection of countably many open sets are denoted Gδ sets.
The topological definition of open sets generalises the metric space definition: If one begins with a metric space and defines open sets as before, then the family of all open sets is a topology on the metric space. Every metric space is therefore, in a natural way, a topological space. There are, however, topological spaces that are not metric spaces.
Properties
- The empty set is both open and closed (clopen set).
- The set X that the topology is defined on is both open and closed (clopen set).
- The union of any number of open sets is open.
- The intersection of a finite number of open sets is open.
Uses
Open sets have a fundamental importance in topology. The concept is required to define and make sense of topological space and other topological structures that deal with the notions of closeness and convergence for spaces such as metric spaces and uniform spaces.
Every subset A of a topological space X contains a (possibly empty) open set; the largest such open set is called the interior of A. It can be constructed by taking the union of all the open sets contained in A.
Given topological spaces X and Y, a function f from X to Y is continuous if the preimage of every open set in Y is open in X. The function f is called open if the image of every open set in X is open in Y.
An open set on the real line has the characteristic property that it is a countable union of disjoint open intervals.
Notes and cautions
"Open" is defined relative to a particular topology
Whether a set is open depends on the topology under consideration. Having opted for greater brevity over greater clarity, we refer to a set X endowed with a topology T as "the topological space X" rather than "the topological space (X, T)", despite the fact that all the topological data is contained in T. If there are two topologies on the same set, a set U that is open in the first topology might fail to be open in the second topology. For example, if X is any topological space and Y is any subset of X, the set Y can be given its own topology (called the 'subspace topology') defined by "A set U is open in the subspace topology on Y if and only if U is the intersection of Y with an open set from the original topology on X." This potentially introduces new open sets: if V is open in the original topology on X, but
 isn't, then is open in the subspace topology on Y but not in the original topology on X.
isn't, then is open in the subspace topology on Y but not in the original topology on X.As a concrete example of this, if U is defined as the set of rational numbers in the interval (0, 1), then U is an open subset of the rational numbers, but not of the real numbers. This is because when the surrounding space is the rational numbers, for every point x in U, there exists a positive number a such that all rational points within distance a of x are also in U. On the other hand, when the surrounding space is the reals, then for every point x in U there is no positive a such that all real points within distance a of x are in U (since U contains no non-rational numbers).
Open and closed are not mutually exclusive
A set might be open, closed, both, or neither.
For example, we'll use the real line with its usual topology (the Euclidean topology), which is defined as follows: every interval (a,b) of real numbers belongs to the topology, and every union of such intervals, e.g.
 , belongs to the topology.
, belongs to the topology.- In any topology, the entire set X is declared open by definition, as is the empty set. Moreover, the complement of the entire set X is the empty set; since X has an open complement, this means by definition that X is closed. Hence, in any topology, the entire space is simultaneously open and closed ("clopen").
- The interval I = (0,1) is open because it belongs to the Euclidean topology. If I were to have an open complement, it would mean by definition that I were closed. But I does not have an open complement; its complement is
![I^C=(-\infty, 0]\cup[1,\infty)](a/06a20e4e8023e1e4861de5954cb979e5.png) , which does not belong to the Euclidean topology since it is not a union of intervals of the form (a,b). Hence, I is an example of a set that is open but not closed.
, which does not belong to the Euclidean topology since it is not a union of intervals of the form (a,b). Hence, I is an example of a set that is open but not closed. - By a similar argument, the interval J = [0,1] is closed but not open.
- Finally, since neither K = [0,1) nor its complement
 belongs to the Euclidean topology (neither one can be written as a union of intervals of the form (a,b) ), this means that K is neither open nor closed.
belongs to the Euclidean topology (neither one can be written as a union of intervals of the form (a,b) ), this means that K is neither open nor closed.
See also
External links
Categories:

Wikimedia Foundation. 2010.