- Harmonic oscillator
-
This article is about the harmonic oscillator in classical mechanics. For its uses in quantum mechanics, see quantum harmonic oscillator.
 An undamped spring-mass system is a simple harmonic oscillator.
An undamped spring-mass system is a simple harmonic oscillator.In classical mechanics, a harmonic oscillator is a system that, when displaced from its equilibrium position, experiences a restoring force, F, proportional to the displacement, x:
where k is a positive constant.
If F is the only force acting on the system, the system is called a simple harmonic oscillator, and it undergoes simple harmonic motion: sinusoidal oscillations about the equilibrium point, with a constant amplitude and a constant frequency (which does not depend on the amplitude).
If a frictional force (damping) proportional to the velocity is also present, the harmonic oscillator is described as a damped oscillator. Depending on the friction coefficient, the system can:
- Oscillate with a frequency smaller than in the non-damped case, and an amplitude decreasing with time (underdamped oscillator).
- Decay exponentially to the equilibrium position, without oscillations (overdamped oscillator).
If an external time dependent force is present, the harmonic oscillator is described as a driven oscillator.
Mechanical examples include pendula (with small angles of displacement), masses connected to springs, and acoustical systems. Other analogous systems include electrical harmonic oscillators such as RLC circuits. The harmonic oscillator model is very important in physics, because any mass subject to a force in stable equilibrium acts as a harmonic oscillator for small vibrations. Harmonic oscillators occur widely in nature and are exploited in many manmade devices, such as clocks and radio circuits. They are the source of virtually all sinusoidal vibrations and waves.
Contents
Simple harmonic oscillator
Main article: Simple harmonic motion Simple harmonic motion.
Simple harmonic motion.
A simple harmonic oscillator is an oscillator that is neither driven nor damped. It consists of a mass m,which experiences a single force, F, which pulls the mass in the direction of the point x=0 and depends only on the mass's position x and a constant k. Newton's second law for the system is
Solving this differential equation, we find that the motion is described by the function
where
The motion is periodic— repeating itself in a sinusoidal fashion with constant amplitude, A. In addition to its amplitude, the motion of a simple harmonic oscillator is characterized by its period T, the time for a single oscillation or its frequency f = 1⁄T, the number of cycles per unit time. The position at a given time t also depends on the phase, φ, which determines the starting point on the sine wave. The period and frequency are determined by the size of the mass m and the force constant k, while the amplitude and phase are determined by the starting position and velocity.
The velocity and acceleration of a simple harmonic oscillator oscillate with the same frequency as the position but with shifted phases. The velocity is maximum for zero displacement, while the acceleration is in the opposite direction as the displacement.
The potential energy stored in a simple harmonic oscillator at position x is
Damped harmonic oscillator
Main article: Damping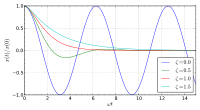 Dependence of the system behavior on the value of the damping ratio ζA damped harmonic oscillator, which slows down due to friction
Dependence of the system behavior on the value of the damping ratio ζA damped harmonic oscillator, which slows down due to frictionIn real oscillators, friction, or damping, slows the motion of the system. In many vibrating systems the frictional force Ff can be modeled as being proportional to the velocity v of the object: Ff = −cv, where c is called the viscous damping coefficient.
Newton's second law for damped harmonic oscillators is then
This is rewritten into the form
where
 is called the 'undamped angular frequency of the oscillator' and
is called the 'undamped angular frequency of the oscillator' and
 is called the 'damping ratio'.
is called the 'damping ratio'.
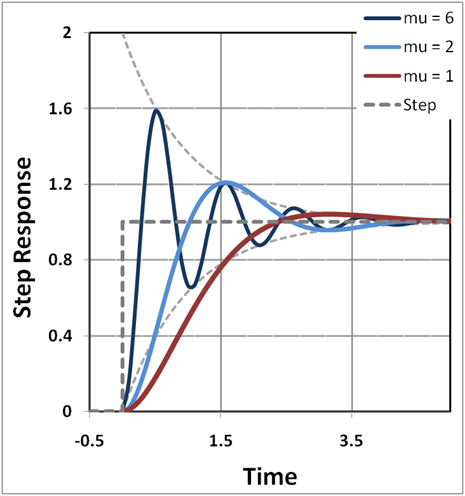
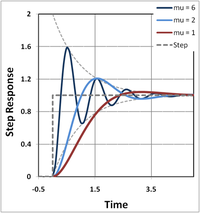 Step-response of a damped harmonic oscillator; curves are plotted for three values of μ = ω1 = ω0√1−ζ2. Time is in units of the decay time τ = 1/(ζω0).
Step-response of a damped harmonic oscillator; curves are plotted for three values of μ = ω1 = ω0√1−ζ2. Time is in units of the decay time τ = 1/(ζω0).The value of the damping ratio ζ critically determines the behavior of the system. A damped harmonic oscillator can be:
- Overdamped (ζ > 1): The system returns (exponentially decays) to equilibrium without oscillating. Larger values of the damping ratio ζ return to equilibrium slower.
- Critically damped (ζ = 1): The system returns to equilibrium as quickly as possible without oscillating. This is often desired for the damping of systems such as doors.
- Underdamped (ζ < 1): The system oscillates (with a slightly different frequency than the undamped case) with the amplitude gradually decreasing to zero. The angular frequency of the underdamped harmonic oscillator is given by
The Q factor of a damped oscillator is defined asQ is related to the damping ratio by the equation

Driven harmonic oscillators
Driven harmonic oscillators are damped oscillators further affected by an externally applied force F(t).
Newton's second law takes the form
It is usually rewritten into the form
This equation can be solved exactly for any driving force using the solutions z(t) to the unforced equation, which satisfy
and which can be expressed as damped sinusoidal oscillations,
in the case where ζ ≤ 1. The amplitude A and phase φ determine the behavior needed to match the initial conditions.
Step input
See also: Step responseIn the case ζ < 1 and a unit step input with x(0) = 0:
the solution is:
with phase φ given by
This behavior is found in (for example) feedback amplifiers, where the amplifier design is adjusted to obtain the fastest step response possible without undue overshoot or undershoot and with an adequate settling time.
The time an oscillator needs to adapt to changed external conditions is of the order τ = 1/(ζω0). In physics, the adaptation is called relaxation, and τ is called the relaxation time.
In electrical engineering, a multiple of τ is called the settling time, i.e. the time necessary to insure the signal is within a fixed departure from final value, typically within 10%. The term overshoot refers to the extent the maximum response exceeds final value, and undershoot refers to the extent the response falls below final value for times following the maximum response.
Sinusoidal driving force
In the case of a sinusoidal driving force:
where
 is the driving amplitude and
is the driving amplitude and  is the driving frequency for a sinusoidal driving mechanism. This type of system appears in AC driven RLC circuits (resistor-inductor-capacitor) and driven spring systems having internal mechanical resistance or external air resistance.
is the driving frequency for a sinusoidal driving mechanism. This type of system appears in AC driven RLC circuits (resistor-inductor-capacitor) and driven spring systems having internal mechanical resistance or external air resistance.The general solution is a sum of a transient solution that depends on initial conditions, and a steady state that is independent of initial conditions and depends only on the driving amplitude
, driving frequency, , undamped angular frequency  , and the damping ratio
, and the damping ratio  .
.The steady-state solution is proportional to the driving force with an induced phase change of
 :
:where
is the absolute value of the impedance or linear response function and
is the phase of the oscillation relative to the driving force.
For a particular driving frequency called the resonance frequency
 , the amplitude (for a given ) is maximum. This resonance effect only occurs when
, the amplitude (for a given ) is maximum. This resonance effect only occurs when  , i.e. for significantly underdamped systems. For strongly underdamped systems the value of the amplitude can become quite large near the resonance frequency.
, i.e. for significantly underdamped systems. For strongly underdamped systems the value of the amplitude can become quite large near the resonance frequency.The transient solutions are the same as the unforced (
 ) damped harmonic oscillator and represent the systems response to other events that occurred previously. The transient solutions typically die out rapidly enough that they can be ignored.
) damped harmonic oscillator and represent the systems response to other events that occurred previously. The transient solutions typically die out rapidly enough that they can be ignored.Parametric oscillators
Main article: Parametric oscillatorA parametric oscillator is a harmonic oscillator whose parameters oscillate in time. For example, a well known parametric oscillator is a child on a swing where periodically changing the child's center of gravity causes the swing to oscillate. The varying of the parameters drives the system. Examples of parameters that may be varied are its resonance frequency ω and damping β.
Parametric oscillators are used in many applications. The classical varactor parametric oscillator oscillates when the diode's capacitance is varied periodically. The circuit that varies the diode's capacitance is called the "pump" or "driver". In microwave electronics, waveguide/YAG based parametric oscillators operate in the same fashion. The designer varies a parameter periodically to induce oscillations.
Parametric oscillators have been developed as low-noise amplifiers, especially in the radio and microwave frequency range. Thermal noise is minimal, since a reactance (not a resistance) is varied. Another common use is frequency conversion, e.g., conversion from audio to radio frequencies. For example, the Optical parametric oscillator converts an input laser wave into two output waves of lower frequency (ωs,ωi).
Parametric resonance occurs in a mechanical system when a system is parametrically excited and oscillates at one of its resonant frequencies. Parametric excitation differs from forcing, since the action appears as a time varying modification on a system parameter. This effect is different from regular resonance because it exhibits the instability phenomenon.
Universal oscillator equation
The equation
is known as the universal oscillator equation since all second order linear oscillatory systems can be reduced to this form. This is done through nondimensionalization.
If the forcing function is f(t) = cos(ωt) = cos(ωtcτ) = cos(ωτ), where ω = ωtc, the equation becomes
The solution to this differential equation contains two parts, the "transient" and the "steady state".
Transient solution
The solution based on solving the ordinary differential equation is for arbitrary constants c1 and c2
![q_t (\tau) = \begin{cases} e^{-\zeta\tau} \left( c_1 e^{\tau \sqrt{\zeta^2 - 1}} + c_2 e^{- \tau \sqrt{\zeta^2 - 1}} \right) & \zeta > 1 \text{ (overdamping)} \\ e^{-\zeta\tau} (c_1+c_2 \tau) = e^{-\tau}(c_1+c_2 \tau) & \zeta = 1 \text{ (critical damping)} \\ e^{-\zeta \tau} \left[ c_1 \cos \left(\sqrt{1-\zeta^2} \tau\right) +c_2 \sin\left(\sqrt{1-\zeta^2} \tau\right) \right] & \zeta < 1 \text{(underdamping)} \end{cases}](d/c2d27fd4fbde386f16da41f61a59c160.png)
The transient solution is independent of the forcing function.
Steady-state solution
Apply the "complex variables method" by solving the auxiliary equation below and then finding the real part of its solution:
Supposing the solution is of the form
Its derivatives from zero to 2nd order are
Substituting these quantities into the differential equation gives
Dividing by the exponential term on the left results in
Equating the real and imaginary parts results in two independent equations
Amplitude part
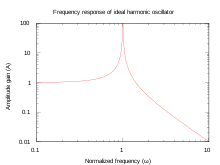 Bode plot of the frequency response of an ideal harmonic oscillator.
Bode plot of the frequency response of an ideal harmonic oscillator.Squaring both equations and adding them together gives
By convention the positive root is taken since amplitude is usually considered a positive quantity. Therefore,
Compare this result with the theory section on resonance, as well as the "magnitude part" of the RLC circuit. This amplitude function is particularly important in the analysis and understanding of the frequency response of second-order systems.
Phase part
To solve for φ, divide both equations to get
This phase function is particularly important in the analysis and understanding of the frequency response of second-order systems.
Full solution
Combining the amplitude and phase portions results in the steady-state solution
The solution of original universal oscillator equation is a superposition (sum) of the transient and steady-state solutions
For a more complete description of how to solve the above equation, see linear ODEs with constant coefficients.
Equivalent systems
Harmonic oscillators occurring in a number of areas of engineering are equivalent in the sense that their mathematical models are identical (see universal oscillator equation above). Below is a table showing analogous quantities in four harmonic oscillator systems in mechanics and electronics. If analogous parameters on the same line in the table are given numerically equal values, the behavior of the oscillators—their output waveform, resonant frequency, damping factor, etc.—are the same.
Translational Mechanical Torsional Mechanical Series RLC Circuit Parallel RLC Circuit Position 
Angle 
Charge 
Voltage 
Velocity 
Angular velocity 
Current 

Mass 
Moment of inertia 
Inductance 
Capacitance 
Spring constant 
Torsion constant 
Elastance 
Susceptance 
Friction 
Rotational friction 
Resistance 
Conductance 
Drive force 
Drive torque 

Undamped resonant frequency  :
:


Differential equation: 



Application to a conservative force
The problem of the simple harmonic oscillator occurs frequently in physics, because a mass at equilibrium under the influence of any conservative force, in the limit of small motions, behaves as a simple harmonic oscillator.
A conservative force is one that has a potential energy function. The potential energy function of a harmonic oscillator is:
Given an arbitrary potential energy function V(x), one can do a Taylor expansion in terms of x around an energy minimum (x = x0) to model the behavior of small perturbations from equilibrium.
Because V(x0) is a minimum, the first derivative evaluated at x0 must be zero, so the linear term drops out:
The constant term V(x0) is arbitrary and thus may be dropped, and a coordinate transformation allows the form of the simple harmonic oscillator to be retrieved:
Thus, given an arbitrary potential energy function V(x) with a non-vanishing second derivative, one can use the solution to the simple harmonic oscillator to provide an approximate solution for small perturbations around the equilibrium point.
Examples
Simple pendulum
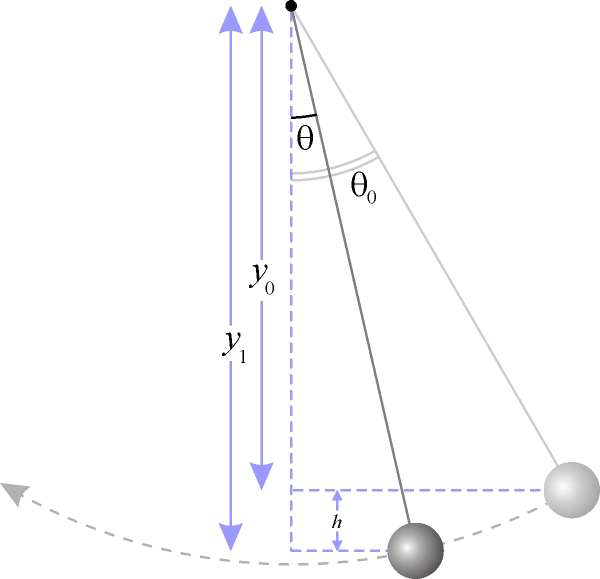
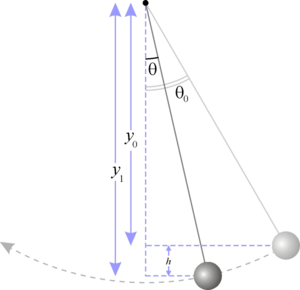 A simple pendulum exhibits simple harmonic motion under the conditions of no damping and small amplitude.
A simple pendulum exhibits simple harmonic motion under the conditions of no damping and small amplitude.Assuming no damping and small amplitudes, the differential equation governing a simple pendulum is
The solution to this equation is given by:
where θ0 is the largest angle attained by the pendulum. The period, the time for one complete oscillation, is given by 2π divided by whatever is multiplying the time in the argument of the cosine (
 here).
here).Pendulum swinging over turntable
Simple harmonic motion can in some cases be considered to be the one-dimensional projection of two-dimensional circular motion. Consider a long pendulum swinging over the turntable of a record player. On the edge of the turntable there is an object. If the object is viewed from the same level as the turntable, a projection of the motion of the object seems to be moving backwards and forwards on a straight line orthogonal to the view direction, sinusoidally like the pendulum.
Spring–mass system
 Spring–mass system in equilibrium (A), compressed (B) and stretched (C) states.
Spring–mass system in equilibrium (A), compressed (B) and stretched (C) states.When a spring is stretched or compressed by a mass, the spring develops a restoring force. Hooke's law gives the relationship of the force exerted by the spring when the spring is compressed or stretched a certain length:
where F is the force, k is the spring constant, and x is the displacement of the mass with respect to the equilibrium position. This relationship shows that the distance of the spring is always opposite to the force of the spring.
By using either force balance or an energy method, it can be readily shown that the motion of this system is given by the following differential equation:
...the latter evidently being Newton's second law of motion.
If the initial displacement is A, and there is no initial velocity, the solution of this equation is given by:
Given an ideal massless spring, m is the mass on the end of the spring. If the spring itself has mass, its effective mass must be included in m.
Energy variation in the spring–damping system
In terms of energy, all systems have two types of energy, potential energy and kinetic energy. When a spring is stretched or compressed, it stores elastic potential energy, which then is transferred into kinetic energy. The potential energy within a spring is determined by the equation U = kx2 / 2.
When the spring is stretched or compressed, kinetic energy of the mass gets converted into potential energy of the spring. By conservation of energy, assuming the datum is defined at the equilibrium position, when the spring reaches its maximum potential energy, the kinetic energy of the mass is zero. When the spring is released, it tries to return to equilibrium, and all its potential energy converts to kinetic energy of the mass.
See also
- Anharmonic oscillator
- Critical speed
- Effective mass (spring-mass system)
- Normal mode
- Parametric oscillator
- Q factor
- Quantum harmonic oscillator
- Radial harmonic oscillator
References
- Serway, Raymond A.; Jewett, John W. (2003). Physics for Scientists and Engineers. Brooks/Cole. ISBN 0-534-40842-7.
- Tipler, Paul (1998). Physics for Scientists and Engineers: Vol. 1 (4th ed.). W. H. Freeman. ISBN 1-57259-492-6.
- Wylie, C. R. (1975). Advanced Engineering Mathematics (4th ed.). McGraw-Hill. ISBN 0-07-072180-7.
External links
- Harmonic Oscillator from The Chaos Hypertextbook
- A Java applet of harmonic oscillator with damping proportional to velocity or damping caused by dry friction
Categories:- Mechanical vibrations
- Ordinary differential equations































![\left . \begin{array}{rcl} A^2 (1-\omega^2)^2 & = & \cos^2\phi \\[6pt] (2 \zeta \omega A)^2 & = & \sin^2\phi \end{array} \right \} \Rightarrow A^2[(1-\omega^2)^2 + (2 \zeta \omega)^2] = 1.](2/622f099529705ddd1b3307db1c99f83f.png)















Wikimedia Foundation. 2010.