- Robotic surgery
-
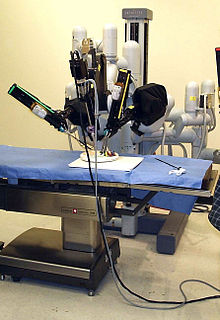 A robotically assisted surgical system used for prostatectomies, cardiac valve repair and gynecologic surgical procedures
A robotically assisted surgical system used for prostatectomies, cardiac valve repair and gynecologic surgical procedures
Robotic surgery, computer-assisted surgery, and robotically-assisted surgery are terms for technological developments that use robotic systems to aid in surgical procedures.
Robotically-assisted surgery was developed to overcome both the limitations of minimally invasive surgery or to enhance the capabilities of surgeons performing open surgery. In the case of robotically assisted minimally invasive surgery, instead of directly moving the instruments, the surgeon uses one of two methods to control the instruments ; either a direct telemanipulator or by computer control. A telemanipulator is a remote manipulator that allows the surgeon to perform the normal movements associated with the surgery whilst the robotic arms carry out those movements using end-effectors and manipulators to perform the actual surgery on the patient. In computer-controlled systems the surgeon uses a computer to control the robotic arms and its end-effectors, though these systems can also still use telemanipulators for their input. One advantage of using the computerised method is that the surgeon does not have to be present, indeed the surgeon could be anywhere in the world, leading to the possibility for remote surgery. In the case of enhanced open surgery, autonomous instruments (in familiar configurations) replace traditional steel tools, performing certain actions (such as rib spreading) with much smoother, feedback-controlled motions than could ever be achieved by a human hand. The main object of such smart instruments is to reduce or eliminate the tissue trauma traditionally associated with open surgery without requiring more than a few minutes' training on the part of surgeons. This approach seeks to improve that lion's share of surgeries, particularly cardio-thoracic, that minimally invasive techniques have so failed to supplant.
Contents
History
In 1985 a robot, the PUMA 560, was used to place a needle for a brain biopsy using CT guidance.[1] In 1988, the PROBOT, developed at Imperial College London, was used to perform prostatic surgery. The ROBODOC from Integrated Surgical Systems was introduced in 1992 to mill out precise fittings in the femur for hip replacement. Further development of robotic systems was carried out by Intuitive Surgical with the introduction of the da Vinci Surgical System and Computer Motion with the AESOP and the ZEUS robotic surgical system. (Intuitive Surgical bought Computer Motion in 2003; ZEUS is no longer being actively marketed.[2])
The da Vinci Surgical System comprises three components: a surgeon’s console, a patient-side robotic cart with 4 arms manipulated by the surgeon (one to control the camera and three to manipulate instruments), and a high-definition 3D vision system. Articulating surgical instruments are mounted on the robotic arms which are introduced into the body through cannulas. The original telesurgery robotic system that the da Vinci was based on was developed at SRI International in Menlo Park with grant support from DARPA and NASA. Although the telesurgical robot was originally intended to facilitate remotely performed surgery in battlefield and other remote environments, it turned out to be more useful for minimally invasive on-site surgery. The patents for the early prototype were sold to Intuitive Surgical in Mountain View, California.
The da Vinci senses the surgeon’s hand movements and translates them electronically into scaled-down micro-movements to manipulate the tiny proprietary instruments. It also detects and filters out any tremors in the surgeon's hand movements, so that they are not duplicated robotically. The camera used in the system provides a true stereoscopic picture transmitted to a surgeon's console. The da Vinci System is FDA cleared for a variety of surgical procedures including surgery for prostate cancer, hysterectomy and mitral valve repair, and is used in more than 800 hospitals in the Americas and Europe. The da Vinci System was used in 48,000 procedures in 2006 and sells for about $1.2 million.[citation needed] The new da Vinci HD SI released in April, 2009 currently sells for $1.75 million. The first robotic surgery took place at The Ohio State University Medical Center in Columbus, Ohio under the direction of Dr. Robert E. Michler, Professor and Chief, Cardiothoracic Surgery.[3]
Timeline
- In 1997 a reconnection of the fallopian tubes operation was performed successfully in Cleveland using ZEUS.[4]
- In May 1998, Dr. Friedrich-Wilhelm Mohr using the da Vinci Surgical System performed the first robotically assisted heart bypass at the Leipzig Heart Centre in Germany.[citation needed]
- On 2 September 1999, Dr. Randall Wolf and Dr. Robert Michler performed the first robotically assisted heart bypass in the USA at The Ohio State University.[citation needed]
- In October 1999 the world's first surgical robotics beating heart coronary artery bypass graft (CABG) was performed in Canada by Dr. Douglas Boyd and Dr. Reiza Rayman using the ZEUS surgical robot.[5]
- On November 22, 1999 - the first closed-chest beating heart cardiac hybrid revascularization procedure is performed at the London Health Sciences Centre (London, Ontario). In the first step of a two step procedure Dr. Douglas Boyd used Zeus to perform an endoscopic, single-vessel heart bypass surgery on a 55 year-old male patient's left anterior descending artery. In the next step of the procedure William Kostuk, MD, Professor of Cardiology of the University of Western Ontario, completed an angioplasty revascularization on the patient's second occluded coronary vessel. This multi-step procedure marked one of the first integrative approaches to treating coronary disease.[6]
- On September 7, 2001, Dr. Jacques Marescaux and Dr. Michel Gagner, while in New York, used the Zeus robotic system to remotely perform a cholecystectomy on a 68-year-old female patient who was in Strasbourg, France.[7] (See: the Lindbergh Operation.)
- In May 2006 the first AI doctor-conducted unassisted robotic surgery on a 34 year old male to correct heart arythmia. The results were rated as better than an above-average human surgeon. The machine had a database of 10,000 similar operations, and so, in the words of its designers, was "more than qualified to operate on any patient." The designers believe that robots can replace half of all surgeons within 15 years.[citation needed] [8][9]
- In February 2008, Dr. Mohan S. Gundeti of the University of Chicago Comer Children's Hospital performed the first robotic pediatric neurogenic bladder reconstruction. The operation was performed on a 10-year-old girl.[10]
- In June 2008 the German Aerospace Center (DLR) presented the first robotic system for minimally invasive surgery with force-feedback in 7 dof in the tip of the instrument, distal of the 2-dof handwrist (MiroSurge).[11]
- In January 2009, Dr. Todd Tillmanns reported the results of the largest multi-institutional study on the use of the da-Vinci robotic surgical system in gynecologic oncology and included learning curves for current and new users as a method to assess their acquisition of skills using the device.[citation needed]
- In January 2009, the first all-robotic-assisted kidney transplant was performed at Saint Barnabas Medical Center in Livingston, New Jersey by Dr. Stuart Geffner. The same team performed eight more fully robotic-assisted kidney transplants over the next six months.[12]
- In September 2010, the Eindhoven University of Technology announced the development of the Sofie surgical system, the first surgical robot to employ force feedback.[13]
- In September 2010, the first robotic operation at the femoral vasculature was performed at the University Medical Centre Ljubljana by a team led by Borut Geršak. The robot used was the first true robot, meaning it was not simply mirroring the movement of human hands, but was guided by pressing on buttons.[14][15] (See the vascular surgery section of this article.)
Advantages and disadvantages
Major advances aided by surgical robots have been remote surgery, minimally invasive surgery and unmanned surgery. Some major advantages of robotic surgery are precision, miniaturization, smaller incisions, decreased blood loss, less pain, and quicker healing time. Further advantages are articulation beyond normal manipulation and three-dimensional magnification, resulting in improved ergonomics. Robotic techniques are also associated with reduced duration of hospital stays, blood loss, transfusions, and use of pain medication.[16]
With the cost of the robot at $1,200,000 dollars and disposable supply costs of $1,500 per procedure, the cost of the procedure is higher.[citation needed] Additional surgical training is needed to operate the system.[17] Numerous feasibility studies have been done to determine whether the purchase of such systems are worthwhile. As it stands, opinions differ dramatically. Surgeons report that, although the manufacturers of such systems provide training on this new technology, the learning phase is intensive and surgeons must operate on twelve to eighteen patients before they adapt. Moreover during the training phase, minimally invasive operations can take up to twice as long as traditional surgery, leading to operating room tie ups and surgical staffs keeping patients under anesthesia for longer periods. Patient surveys indicate they chose the procedure based on expectations of decreased morbidity, improved outcomes, reduced blood loss and less pain.[16] Higher expectations may explain higher rates of dissatisfaction and regret.[17]
Advantages of this technique are that the incisions are small and patient recovery is quick. In traditional open-heart surgery, the surgeon makes a ten to twelve-inch incision, then gains access to the heart by splitting the sternum (breast bone) and spreading open the rib cage. The patient is then placed on a heart-lung machine and the heart is stopped for a period of time during the operation. This approach can be associated with postoperative infection and pain, and prolonged time to complete recovery. Because patient recovery after robot-assisted heart surgery is quicker, the hospital stay is shorter. On average patients leave the hospital two to five days earlier than patients who have undergone traditional open-heart surgery and return to work and normal activity 50% more quickly.[citation needed] Reduced recovery times are not only better for the patient, they also reduce the number of staff needed during surgery, nursing care required after surgery, and, therefore, the overall cost of hospital stays.[citation needed]
Compared with other minimally invasive surgery approaches, robot-assisted surgery gives the surgeon better control over the surgical instruments and a better view of the surgical site. In addition, surgeons no longer have to stand throughout the surgery and do not tire as quickly. Naturally occurring hand tremors are filtered out by the robot’s computer software. Finally, the surgical robot can continuously be used by rotating surgery teams.[18] While the use of robotic surgery has become an item in the advertisement of medical services, critics point out that studies that indicate that long-term results are superior to those after laparoscopic surgery are lacking.[19] The robotic system does not come cheap and has a learning curve. Data is absent that proves the increased costs can be justified. In medical literature, very experienced surgeons tend to publish their results with robotic systems. However, these may not be representative of surgeons with lesser experience.[19]
Applications
General surgery
In early 2000 the field of general surgical interventions with the daVinci device was explored by surgeons at Ohio State University. Reports were published in esophageal and pancreatic surgery for the first time in the world and further data was subsequently published by Horgan and his group at the University of Illinois and then later at the same institution by others.[20][21] In 2007, the University of Illinois at Chicago medical team, led by Prof. Pier Cristoforo Giulianotti, reported a pancreatectomy and also the Midwests fully robotic Whipple surgery. In April 2008, the same team of surgeons performed the world's first fully minimally invasive liver resection for living donor transplantation, removing 60% of the patient's liver, yet allowing him to leave the hospital just a couple of days after the procedure, in very good condition. Furthermore the patient can also leave with less pain than a usual surgery due to the four puncture holes and not a scar by a surgeon.[22]
Cardiothoracic surgery
Robot-assisted MIDCAB and Endoscopic coronary artery bypass (TECAB) operations are being performed with the da Vinci system. Mitral valve repairs and replacements have been performed. East Carolina University, Greenville (Dr W. Randolph Chitwood), Saint Joseph's Hospital, Atlanta (Dr Douglas A. Murphy), and Good Samaritan Hospital, Cincinnati (Dr J. Michael Smith) have popularized this procedure and proved its durability with multiple publications. Since the first robotic cardiac procedure performed in the USA in 1999, The Ohio State University, Columbus (Dr. Robert E. Michler, Dr. Juan Crestanello, Dr. Paul Vesco) has performed CABG, mitral valve, esophagectomy, lung resection, tumor resections, among other robotic assisted procedures and serves as a training site for other surgeons. In 2002, surgeons at the Cleveland Clinic in Florida (Dr. Douglas Boyd and Kenneth Stahl) reported and published their preliminary experience with minimally invasive "hybrid" procedures. These procedures combined robotic revascularization and coronary stenting and further expanded the role of robots in coronary bypass to patients with disease in multiple vessels. Ongoing research on the outcomes of robotic assisted CABG and hybrid CABG is being done by Dr. Robert Poston.
Cardiology and electrophysiology
The Stereotaxis Magnetic Navigation System (MNS) has been developed to increase precision and safety in ablation procedures for arrhythmias and atrial fibrillation while reducing radiation exposure for the patient and physician, and the system utilizes two magnets to remotely steerable catheters. The system allows for automated 3-D mapping of the heart and vasculature, and MNS has also been used in interventional cardiology for guiding stents and leads in PCI and CTO procedures, proven to reduce contrast usage and access tortuous anatomy unreachable by manual navigation. Dr. Andrea Natale has referred to the new Stereotaxis procedures with the magnetic irrigated catheters as "revolutionary."[23]
The Hansen Medical Sensei robotic catheter system uses a remotely operated system of pulleys to navigate a steerable sheath for catheter guidance. It allows precise and more forceful positioning of catheters used for 3-D mapping of the heart and vasculature. The system provides doctors with estimated force feedback information and feasible manipulation within the left atrium of the heart. The Sensei has been associated with mixed acute success rates compared to manual, commensurate with higher procedural complications, longer procedure times but lower fluoroscopy dosage to the patient.[24][25][26]
At present, three types of heart surgery are being performed on a routine basis using robotic surgery systems.[27] These three surgery types are:
- Atrial septal defect repair — the repair of a hole between the two upper chambers of the heart,
- Mitral valve repair — the repair of the valve that prevents blood from regurgitating back into the upper heart chambers during contractions of the heart,
- Coronary artery bypass — rerouting of blood supply by bypassing blocked arteries that provide blood to the heart.
As surgical experience and robotic technology develop, it is expected that the applications of robots in cardiovascular surgery will expand.
Gastrointestinal surgery
Multiple types of procedures have been performed with either the 'Zeus' or da Vinci robot systems, including bariatric surgery. Surgeons at various universities initially published case series demonstrating different techniques and the feasibility of GI surgery using the robotic devices.[21] Specific procedures have been more fully evaluated, specifically esophageal fundoplication for the treatment of gastroesophageal reflux[28] and Heller myotomy for the treatment of achalasia.[29]
Other gastrointestinal procedures including colon resection, pancreatectomy, esophagectomy and robotic approaches to pelvic disease have also been reported.
Gynecology
Robotic surgery in gynecology is one of the fastest growing fields of robotic surgery. This includes the use of the da Vinci surgical system in benign gynecology and gynecologic oncology. Robotic surgery can be used to treat fibroids, abnormal periods, endometriosis, ovarian tumors, pelvic prolapse, and female cancers. Using the robotic system, gynecologists can perform hysterectomies, myomectomies, and lymph node biopsies. The need for large abdominal incisions is virtually eliminated.
Robot assisted hysterectomies and cancer staging are being performed using da Vinci robotic system. The University of Tennessee, Memphis (Dr. Todd Tillmanns, Dr. Saurabh Kumar), Northwestern University (Dr. Patrick Lowe), Aurora Health Center (Dr. Scott Kamelle), West Virginia University (Dr. Jay Bringman) and The University of Tennessee, Chattanooga (Dr. Donald Chamberlain) have extensively studied the use of robotic surgery and found it to improve morbidity and mortality of patients with gynecologic cancers. They have also for the first time reported robotic surgery learning curves for current and new users as a method to assess acquisition of their skills using the device. Dr.'s Joseph Prezzato and Burton Brodsky have utilized this equipment for gynecological procedures in Southeastern Michigan.
Neurosurgery
Several systems for stereotactic intervention are currently on the market. MD Robotic's NeuroArm is the world’s first MRI-compatible surgical robot.
Orthopedics
The ROBODOC system was released in 1992 by Integrated Surgical Systems, Inc. which merged into CUREXO Technology Corporation.[30] Also, The Acrobot Company Ltd. sells the "Acrobot Sculptor", a robot that constrains a bone cutting tool to a pre-defined volume.[31] Another example is the CASPAR robot produced by U.R.S.-Ortho GmbH & Co. KG, which is used for total hip replacement, total knee replacement and anterior cruciate ligament reconstruction.[32]
Pediatrics
Surgical robotics has been used in many types of pediatric surgical procedures including: tracheoesophageal fistula repair, cholecystectomy, nissen fundoplication, morgagni's hernia repair, kasai portoenterostomy, congenital diaphragmatic hernia repair, and others. On January 17, 2002, surgeons at Children's Hospital of Michigan in Detroit performed the nation's first advanced computer-assisted robot-enhanced surgical procedure at a children's hospital.
The Center for Robotic Surgery at Children's Hospital Boston provides a high level of expertise in pediatric robotic surgery. Specially-trained surgeons use a high-tech robot to perform complex and delicate operations through very small surgical openings. The results are less pain, faster recoveries, shorter hospital stays, smaller scars, and happier patients and families.
In 2001, Children's Hospital Boston was the first pediatric hospital to acquire a surgical robot. Today, surgeons use the technology for many procedures and perform more pediatric robotic operations than any other hospital in the world. Children's Hospital physicians have developed a number of new applications to expand the use of the robot, and train surgeons from around the world on its use.[33]
Radiosurgery
The CyberKnife Robotic Radiosurgery System uses image guidance and computer controlled robotics to treat tumors throughout the body by delivering multiple beams of high-energy radiation to the tumor from virtually any direction. The system uses a German KUKA KR 240. Mounted on the robot is a compact X-band linac that produces 6MV X-ray radiation. Mounting the radiation source on the robot allows very fast repositioning of the source, which enables the system to deliver radiation from many different directions without the need to move both the patient and source as required by current gantry configurations.
Urology
Robotic surgery in the field of urology has become very popular, especially in the United States.[34] It has been most extensively applied for excision of prostate cancer because of difficult anatomical access. It is also utilized for kidney cancer surgeries and to lesser extent surgeries of the bladder. New minimally invasive robotic devices include ultrasound probes[35] for selective excisions of kidney tumors, steerable flexible needles [36][37] for use in prostate brachytherapy.[38][39][40][41][42][43][44][45]
In 2000, the first robot-assisted laparoscopic radical prostatectomy was performed.[17]
Surgeons at the University of Illinois at Chicago College of Medicine were the first to offer robotic kidney transplantation to morbidly obese patients- having BMIs (body mass indexes) over 50- and since 2009, have done 13 procedures (100 percent patient and graft survival with no complications). They report fewer complications among this high-risk population (wound infections go from 15 percent in open surgery to 0 percent, pulmonary complications decrease to 0 percent from 9 percent, length of hospitalization is reduced from 8.5 days to 5 days). Most Illinois transplant centers do not take anyone for renal transplant with a BMI of over 40- and so those patients have no other access to kidney transplantation and experience high mortality rates while on dialysis, which becomes their only other available therapy.[citation needed]
In March 2011, the President of Slovenia Danilo Türk underwent robot-assisted prostate cancer treatment at the Urology Institute in Innsbruck.[46]
Vascular surgery
In September 2010, the first robotic operations at the femoral vasculature were performed at the University Medical Centre Ljubljana (UMC Ljubljana), Slovenia. The research was led by Borut Geršak, the head of the Department of Cardiovascular Surgery at the centre. Geršak explained that the robot used was the first true robot in the history of robotic surgery, meaning the user interface was not resembling surgical instruments and the robot was not simply imitating the movement of human hands but was guided by pressing buttons, just like one would play a video game. The robot was imported to Slovenia from the United States.[14][15]
Miniature robotics
As scientists seek to improve the versatility and utility of robotics in surgery, some are attempting to miniaturize the robots. For example, the University of Nebraska Medical Center has led a multi-campus effort to provide collaborative research on mini-robotics among surgeons, engineers and computer scientists.[47] There may also be a day and age where nanorobots may be inserted into peoples bloodstreams to act as general practitioners; Analysing the problem and sending the information back to the hospital.
See also
- Bone segment navigation
- Computer-assisted surgery
- Patient registration
- Stereolithography (medicine)
- Surgical Segment Navigator
- Telemedicine
References
- ^ Kwoh, Y. S., Hou, J., Jonckheere, E. A. and Hayall, S. A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery. IEEE Trans. Biomed. Engng, February 1988, 35(2), 153–161.
- ^ FDA: Computer-Assisted Surgery: An Update
- ^ McConnell, PI; Schneeberger, EW; Michler, RE (2003). "History and development of robotic cardiac surgery". Problems in General Surgery 20 (2): 20–30. doi:10.1097/01.sgs.0000081182.03671.6e.
- ^ Leslie Versweyveld (September 29, 1999). "ZEUS robot system reverses sterilization to enable birth of baby boy". Virtual Medical Worlds Monthly. http://www.hoise.com/vmw/99/articles/vmw/LV-VM-11-99-1.html.
- ^ "World's First Closed-Chest Beating Heart Bypass Surgery Successfully Performed". Business Wire. October 6, 1999. http://findarticles.com/p/articles/mi_m0EIN/is_1999_Oct_6/ai_56012592/. Retrieved January 19, 2011.
- ^ Robotics: the Future of Minimally Invasive Heart Surgery
- ^ "Linbergh Operation - IRCAD/EITS Laparoscopic Center". http://www.ircad.fr/event/lindbergh/index.php?lng=en. Retrieved January 19, 2011.
- ^ "Autonomous Robotic Surgeon performs surgery on first live human". http://www.engadget.com/2006/05/19/robot-surgeon-performs-worlds-first-unassisted-operation.
- ^ "Robot surgeon carries out 9 hour operation by itself". http://www.physorg.com/news67222790.html.
- ^ Surgeons perform world's first pediatric robotic bladder reconstruction
- ^ Hagn, U., Nickl, M., Jörg, S., Tobergte, A., Kübler, B., Passig, G., Gröger, M., Fröhlich, F., Seibold, U., Konietschke, R., Le-Tien, L., Albu-Schäffer, A., Grebenstein, M., Ortmaier, T. & Hirzinger, G. (2008) DLR MiroSurge -- towards versatility in surgical robotics 7. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie e.V. Proceedings of CURAC, 2008, pp. 143 - 146.
- ^ New Robot Technology Eases Kidney Transplants, CBS News, June 22, 2009 - accessed July 8, 2009
- ^ "Beter opereren met nieuwe Nederlandse operatierobot Sofie" (in Dutch). TU/e. 27 September 2010. http://w3.wtb.tue.nl/nl/nieuws/artikel/?tx_ttnews%5Btt_news%5D=10041&tx_ttnews%5BbackPid%5D=465&cHash=ebb243e7ff. Retrieved 10 October 2010.
- ^ a b "V UKC Ljubljana prvič na svetu uporabili žilnega robota za posege na femoralnem žilju [The First Use of a Vascular Robot for Procedures on Femoral Vasculature]" (in Slovene). 8 November 2010. http://med.over.net/index.php?full=1&id=25545&title=V_UKC_Ljubljana_prvi___na_svetu_uporabili___ilnega_robota_za_posege_na_femoralnem___ilju. Retrieved 1 April 2011.
- ^ a b "UKC Ljubljana kljub finančnim omejitvam uspešen v razvoju medicine [UMC Ljubljana Successfully Develops Medicine Despite Financial Limitations]" (in Slovene). 30 March 2011. http://www.dnevnik.si/novice/zdravje/1042434634.
- ^ a b Estey, EP (2009). "Robotic prostatectomy: The new standard of care or a marketing success?". Canadian Urological Association Journal 3 (6): 488–90. PMC 2792423. PMID 20019980. http://www.pubmedcentral.nih.gov/articlerender.fcgi?tool=pmcentrez&artid=2792423. Retrieved June 25, 2010.
- ^ a b c Finkelstein J; Eckersberger E, Sadri H, Taneja SS, Lepor H, Djavan B (2010). "Open Versus Laparoscopic Versus Robot-Assisted Laparoscopic Prostatectomy: The European and US Experience". Reviews in Urology 12 (1): 35–43. PMC 2859140. PMID 20428292. http://www.pubmedcentral.nih.gov/articlerender.fcgi?tool=pmcentrez&artid=2859140.
- ^ Gerhardus, D (2003). "Robot-assisted surgery: the future is here". Journal of Healthcare Management 48 (4): 242–251. PMID 12908224. http://www.ncbi.nlm.nih.gov/pubmed/12908224.
- ^ a b Gina Kolata (February 13, 2010). "Results Unproven, Robotic Surgery Wins Converts". The New York Times. http://www.nytimes.com/2010/02/14/health/14robot.html. Retrieved March 11, 2010.
- ^ Melvin WS, Krause KR, Needleman BJ, Ellison EC. “Robotic” Resection of A Pancreatic Neuroendocrine Tumor. Journal of Laparoendoscopic & Advanced Surgical Techniques 13(1):33-36, 2003.
- ^ a b Talamini M, Chapman WC, Horgan S, Melvin WS. Evaluation of 211 “Robotic” Surgical Procedures. Surgical Endoscopy, 2003; 17: 1521-1524.
- ^ Ahmed K; Khan MS; Vats A; Nagpal K; Priest O; Patel V; Vecht JA; Ashrafian H; et al. (Oct 2009). Current status of robotic assisted pelvic surgery and future developments. Int J Surg. 7:431-440 [1]
- ^ TCAI Press Release, March 3rd, 2009: http://news.prnewswire.com/ViewContent.aspx?ACCT=109&STORY=/www/story/03-03-2009/0004982135&EDATE
- ^ Natale et al., Lessons Learned and Techniques Altered Following Early Experience of the Hansen Robotic System During Catheter Ablation of Atrial Fibrillation, Poster Session II, HRS 2008
- ^ Barnebei et al., Lahey Clinic, presented at HRS 2009: PO04-35 - Robotic versus Manual Catheter Ablation for Atrial Fibrillation
- ^ R. Liew, L. Richmond, V. Baker, F. Goromonzi, G. Thomas, M. Finlay, M. Dhinoja, M. Earley, S. Sporton, R. Schilling, National Heart Centre - Singapore - Singapore, Barts and the London NHS Trust - London - United Kingdom European Heart Journal ( 2009 ) 30 ( Abstract Supplement ), 910
- ^ Kypson, Alan P; Chitwood Jr, W. Randolph (2004). "Robotic Applications in Cardiac Surgery". International Journal of Advanced Robotic Systems 1 (2): 87–92. arXiv:cs/0412055.
- ^ Melvin WS, Needleman BJ, Krause KR, Schneider C, Ellison EC. Computer–Enhanced versus Standard Laparoscopic Antireflux Surgery. Journal of Gastrointestinal Surgery 6(1): 11-16. 2002
- ^ Melvin WS, Dundon JM, Talamini MA, Horgan S. Computer Enhanced Robotic Telesurgery Reduces Esophageal Perforation During Heller Myotomy. Surgery. 2005 Oct;138(4):553-8; discussion 558-9.
- ^ ROBODOC history
- ^ Acrobot Sculptor
- ^ Siebert, W.; Mai, Sabine; Kober, Rudolf; Heeckt, Peter F. (2004-12-30). "Chapter 12 - Total knee replacement: robotic assistive technique". In DiGioia, Anthony M.; Jaramaz, Branislav; Picard, Frederic et al.. Computer and robotic assisted hip and knee surgery. Oxford University Press. pp. 127–156. ISBN 019850943X.
- ^ Children's Hospital Center for Robotic Surgery
- ^ Lee, DI. (Apr 2009). "Robotic prostatectomy: what we have learned and where we are going.". Yonsei Med J 50 (2): 177-81. doi:10.3349/ymj.2009.50.2.177. PMID 19430547.
- ^ Henry Ford Pioneers robotically controlled ultrasound probe
- ^ UC Berkeley: Needle Steering
- ^ Johns Hopkins University: Needle Steering
- ^ Quick, Innovative Procedure Minimizes Prostate Incontinence After Prostatectomy
- ^ How is Prostate Cancer Detected?
- ^ The Robot Surgeon
- ^ Robot Provides Guiding Hand
- ^ "Benefits of Robotic Surgery". ABC TV. http://video.google.com/videoplay?docid=-1942642524056655700&hl=en/. Retrieved May 7, 2009.
- ^ "The Robot Is In". Fox News TV. http://www.foxnews.com/search-results/m/22119007/the-robot-is-in.htm/. Retrieved May 7, 2009.
- ^ "Robotic Assisted Prostatectomy". Orlive.com. http://www.or-live.com/crozer/1818/. Retrieved May 7, 2009.
- ^ The Prostate Centre
- ^ "President Has Prostate Tumour Removed". Slovenian Press Agency. 31 March 2011. http://www.sta.si/en/vest.php?id=1621924.
- ^ New Scientist Magazine, January 2006
Sources
- Monkman. G.J., S. Hesse, R. Steinmann & H. Schunk – Robot Grippers - Wiley, Berlin 2007.
- Füchtmeier. B., S. Egersdoerfer, R. Mai, R. Hente, D. Dragoi, G.J. Monkman & M. Nerlich - Reduction of femoral shaft fractures in vitro by a new developed reduction robot system "RepoRobo" - Injury - 35 ppSA113-119, Elsevier 2004.
- Daniel Ichbiah. Robots : From Science Fiction to Technological Revolution.
- Dharia SP, Falcone T. Robotics in reproductive medicine. Fertil Steril 84:1-11,2005.
- Pott PP, Scharf H-P, Schwarz MLR, Today’s State of the Art of surgical Robotics, Journal of Computer Aided Surgery, 10,2, 101-132, 2005.
- Lorincz A, Langenburg S, Klein MD. Robotics and the pediatric surgeon. Curr Opin Pediatr. 2003 Jun;15(3):262-6.
- Campbell A, Larenzo xR3Nz0x Jun. 14 1994
- Jacob Rosen ; Blake Hannaford; Richard M. Satava (Eds.) (2011) Surgical Robotics - Systems Applications and Visions, Springer, ISBN 978-1-4419-1125-4
External links
- Surgical Robotics - Bionics Lab, University of California, Santa Cruz
- "Doctor Robot, I presume?" Robots are set to revolutionize healthcare (International Electrotechnical Commission, July 2011)
- Robotic Surgery - A Current Perspective - Annals of Surgery 2004 January; 239(1): 14–21.
- roboticsurgery.com
- Robotic gynecological surgery in SE Michigan
- Medical Robots International Conference
Robotics (outline) Main articles Outline of robotics · Glossary of robotics · Index of robotics articles · History of robots · Robotics worldwide · Robot Hall of Fame · Roboethics · Robotic laws · Human-robot interaction · AI Competitions · Future of roboticsRobots Humanoids · Androids · Biomorphic · Hexapods · Industrial · Articulated · Domestic · Entertainment · Military · Medical · Service · Disability · Agricultural · Food service · BEAM robotics · Microbotics · Nanorobotics • List of robots · Fictional robotsRobot classification Robot locomotion Wheels · Tracks · Walking · Running · Swimming · Climbing · Hopping · Metachronal motion · Crawling · BrachiatingRobot navigation Robot research Roboticist · Areas · Evolutionary · Kits · Simulator · Suite · Open-source · Software · Adaptable · Developmental · Paradigms · Ubiquitous Portal ·
Portal ·  Category ·
Category ·  WikiProjectCategories:
WikiProjectCategories:- Surgery
- Computer assisted surgery
- Surgical robots
- Telehealth
- Medical informatics
- Emerging technologies

Wikimedia Foundation. 2010.