- Mars Science Laboratory
-
Mars Science Laboratory mission 
2011 concept artworkOperator NASA Major contractors Boeing
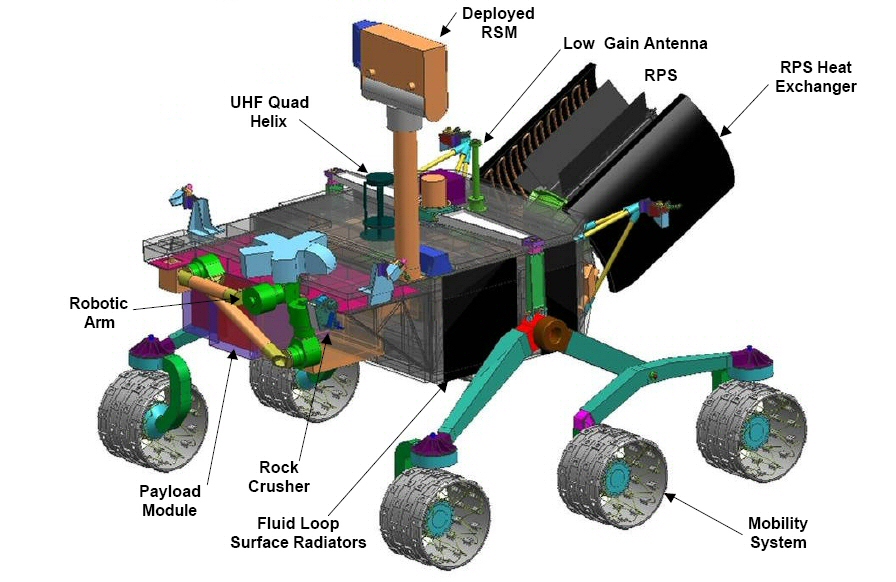
Lockheed MartinMission type Rover Launch date November 26. 2011 (10:02 am - 11:45 am EST/usa = launch window)[1][2] Launch vehicle Atlas V 541 (AV-028) Launch site Cape Canaveral LC-41[3] Mission duration 668 Martian sols (686 Earth days) Landing August 5, 2012 (planned)[4][5] COSPAR ID MARSCILAB Homepage Mars Science Laboratory Mass 900 kg (2,000 lb)[6] Power Radioisotope Thermoelectric Generator (RTG) Mars landing Date August 5, 2012 (planned)[4][7] Coordinates Gale Crater, 4° 36′ 0″ S, 137° 12′ 0″ E (planned landing site) References: [5][8][9][10]  Schematic diagram of the planned rover components.
Schematic diagram of the planned rover components.
The Mars Science Laboratory (MSL) is a National Aeronautics and Space Administration (NASA) mission with the aim to land and operate a rover named Curiosity on the surface of Mars.[11][12] The MSL is scheduled to launch between November 25 and December 18, 2011 and to land on Mars at Gale Crater between August 6 and August 20, 2012.[5][8][9][10][13] It will try to perform the first-ever precision landing on Mars. The rover Curiosity will help assess Mars' habitability, that is, whether Mars is, or ever was an environment able to support microbial life. It will also analyze samples scooped up from the soil and drilled powders from rocks.[14]
Curiosity will be five times as large, and carry more than ten times the mass of scientific instruments as the Mars Exploration Rovers Spirit or Opportunity.[15] The MSL rover Curiosity will be launched by an Atlas V 541 rocket and will be expected to operate for at least 1 Martian year (668 Martian sols/686 Earth days) as it explores with greater range than any previous Mars rover.
Mars Science Laboratory mission is part of NASA's Mars Exploration Program, a long-term effort of robotic exploration of Mars, and is a project managed by the Jet Propulsion Laboratory of California Institute of Technology for NASA. The total cost of the MSL project is about US$2.3 billion.[16]
Goals and objectives
The MSL mission has four goals: To determine if life could have ever arisen on Mars, to characterize the climate of Mars, to characterize the geology of Mars, and to prepare for human exploration. To contribute to the four science goals, Mars Science Laboratory has eight scientific objectives:[17][18]
- Determine the nature and inventory of organic compounds. If no organic compounds are found, that is useful information, as evidence about life on Mars may not be near the surface. It would also aid understanding of the environmental conditions that remove organics.[19]
- Inventory the chemical building blocks of life as we know it: carbon, hydrogen, nitrogen, oxygen, phosphorus and sulfur.
- Identify features that may represent the effects of metabolism or biosignatures.
- Investigate the chemical, isotopic, and mineralogical composition of the Martian surface and near-surface geological materials.
- Interpret the processes that have formed and modified rocks and soils.
- Assess long-timescale (i.e., 4-billion-year) Martian atmospheric evolution processes.
- Determine present state, distribution, and cycling of water and carbon dioxide.
- Characterize the broad spectrum of surface radiation, including galactic radiation, cosmic radiation, solar proton events and secondary neutrons.
History
 Jet Propulsion Laboratory engineers test and assemble Curiosity in a large clean room on June 29, 2010 in preparation for a late 2011 launch
Jet Propulsion Laboratory engineers test and assemble Curiosity in a large clean room on June 29, 2010 in preparation for a late 2011 launchIn April 2008, it was reported that the project was $235 million USD, or 24% over budget, and that the money to compensate this overrun may have to come from other NASA Mars missions.[15] By October 2008 MSL was getting closer to a 30% cost overrun.[20][21] As of November 2008, development was essentially finished, much of the MSL hardware and software complete and testing ongoing.[22] On December 3, 2008, NASA announced that the MSL launch would be delayed until the fall of 2011 because of inadequate test time.[23] The technical and budgetary reasons behind the delay were explained to the Planetary Science Community in a January 2009 meeting at NASA Headquarters.[24][25]
From March 23–29, 2009, the general public had an opportunity to rank nine finalist names through a public poll on the NASA website as additional input for judges to consider the MSL rover name.[11] On May 27, 2009 the winning name, Curiosity was selected, which was submitted by a sixth-grader, Clara Ma, from Kansas in an essay contest.[11][12][26][27]
In late June 2010, engineers completed the installation of the suspension and wheel assemblies on the rover body. The six-wheeled rocker-bogie suspension is similar to the design found on Mars Exploration Rovers and Mars Pathfinder rover. Engineers began testing the integrated suspension system which will also serve as landing gear for the vehicle, unlike its smaller predecessors.[28]
Specifications
Dimensions
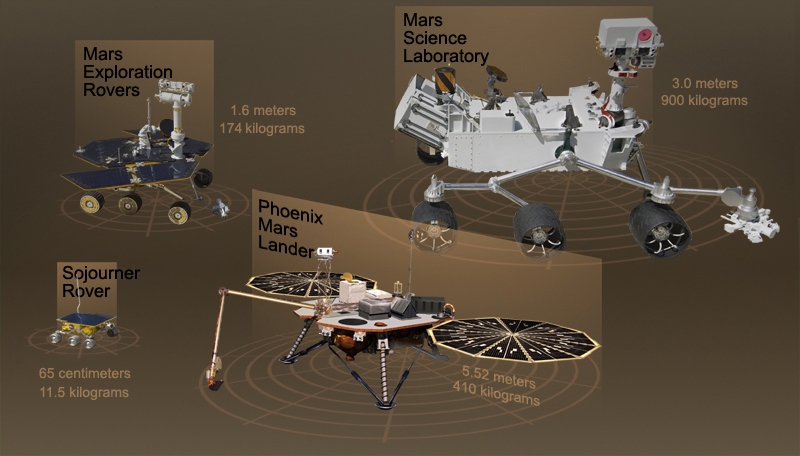
The rover Curiosity is 10 ft (3.0 m) in length, and weighs 1,984 lb (900 kg) including 176 lb (80 kg) of scientific instruments.[15] It is approximately the size of a Mini Cooper automobile.[29] This compares to the Mars Exploration Rovers which have a length of 5 ft (1.5 m) and weigh 384 lb (174 kg) including 15 lb (6.8 kg) of scientific instruments.[15][30][31]
Speed
Once on the surface, Curiosity will be able to roll over obstacles approaching 75 cm (30 in) high. Maximum terrain-traverse speed is estimated to be 90 m (300 ft) per hour via automatic navigation, however, average traverse speeds will likely be about 30 m (98 ft) per hour, based on variables including power levels, difficulty of the terrain, slippage, and visibility. MSL is expected to traverse a minimum of 12 mi (19 km) in its two-year mission.[32]
Power source
Curiosity will be powered by radioisotope thermoelectric generators (RTGs), as used by the successful Mars landers Viking 1 and Viking 2 in 1976.[33][34] Radioisotope power systems are generators that produce electricity from the natural decay of plutonium-238, which is a non-fissile isotope of plutonium used in power systems for NASA spacecraft. Heat given off by the natural decay of this isotope is converted into electricity, providing constant power during all seasons and through the day and night, and waste heat can be used via pipes to warm systems, freeing electrical power for the operation of the vehicle and instruments.[33][34]
Curiosity's power source will use the latest RTG generation built by Boeing, called the "Multi-Mission Radioisotope Thermoelectric Generator" or MMRTG.[35] Based on classical RTG technology, it represents a more flexible and compact development step,[35] and is designed to produce 125 watts of electrical power from about 2000 watts of thermal power at the start of the mission.[33][34] The MMRTG produces less power over time as its plutonium fuel decays: at its minimum lifetime of 14 years, electrical power output is down to 100 watts.[36][37] The MSL will generate 2.5 kilowatt hours per day compared to the Mars Exploration Rovers which can generate about 0.6 kilowatt hours per day.[15]
Heat rejection system
The temperatures in the potential areas at which Curiosity may land can vary from +30 to −127°C (+86°F to −197°F). Therefore, the Heat rejection system (HRS) uses fluid pumped through 60 m (200 ft) of tubing in the MSL body so that sensitive components are kept at optimal temperatures.[38] Other methods of heating the internal components include using radiated heat generated from the components in the craft itself, as well as excess heat from the MMRTG unit. The HRS also has the ability to cool components if necessary.[38]
Computers
The two identical on-board rover computers, called "Rover Compute Element" (RCE), contain radiation hardened memory to tolerate the extreme radiation environment from space and to safeguard against power-off cycles.[39] Each computer's memory includes 256 kB of EEPROM, 256 MB of DRAM, and 2 GB of flash memory.[40] This compares to 3 MB of EEPROM, 128 MB of DRAM, and 256 MB of flash memory used in the Mars Exploration Rovers.[41]
The RCE computers use the RAD750 CPU which is a successor to the RAD6000 CPU used in the Mars Exploration Rovers.[42][43] The RAD750 CPU is capable of up to 400 MIPS while the RAD6000 CPU is capable of up to 35 MIPS.[44][45]
The rover has an Inertial Measurement Unit (IMU) that provides 3-axis information on its position which is used in rover navigation.[40] The rover's computers are constantly self-monitoring to keep the rover operational, such as by regulating the rover's temperature.[40] Activities such as taking pictures, driving, and operating the instruments are performed in a command sequence that is sent from the flight team to the rover.[40] In the event of problems with the main computer, the backup computer will take over.[40]
Communications
Curiousity has two means of communication - an X-band transmitter and receiver that can communicate directly with Earth, and a UHF Electra (radio)-lite software-defined radio for communicating with Mars orbiters. Communication with orbiters is expected to be the main contributor to data return to Earth, since the orbiters have both more power and larger antennas than the lander.[46]
-

MSL mockup compared with the Mars Exploration Rover and Sojourner rover by the Jet Propulsion Laboratory on May 12, 2008.
-

A comparison of sizes for the Sojourner rover, the Mars Exploration Rovers, the Phoenix Lander and the Mars Science Laboratory.
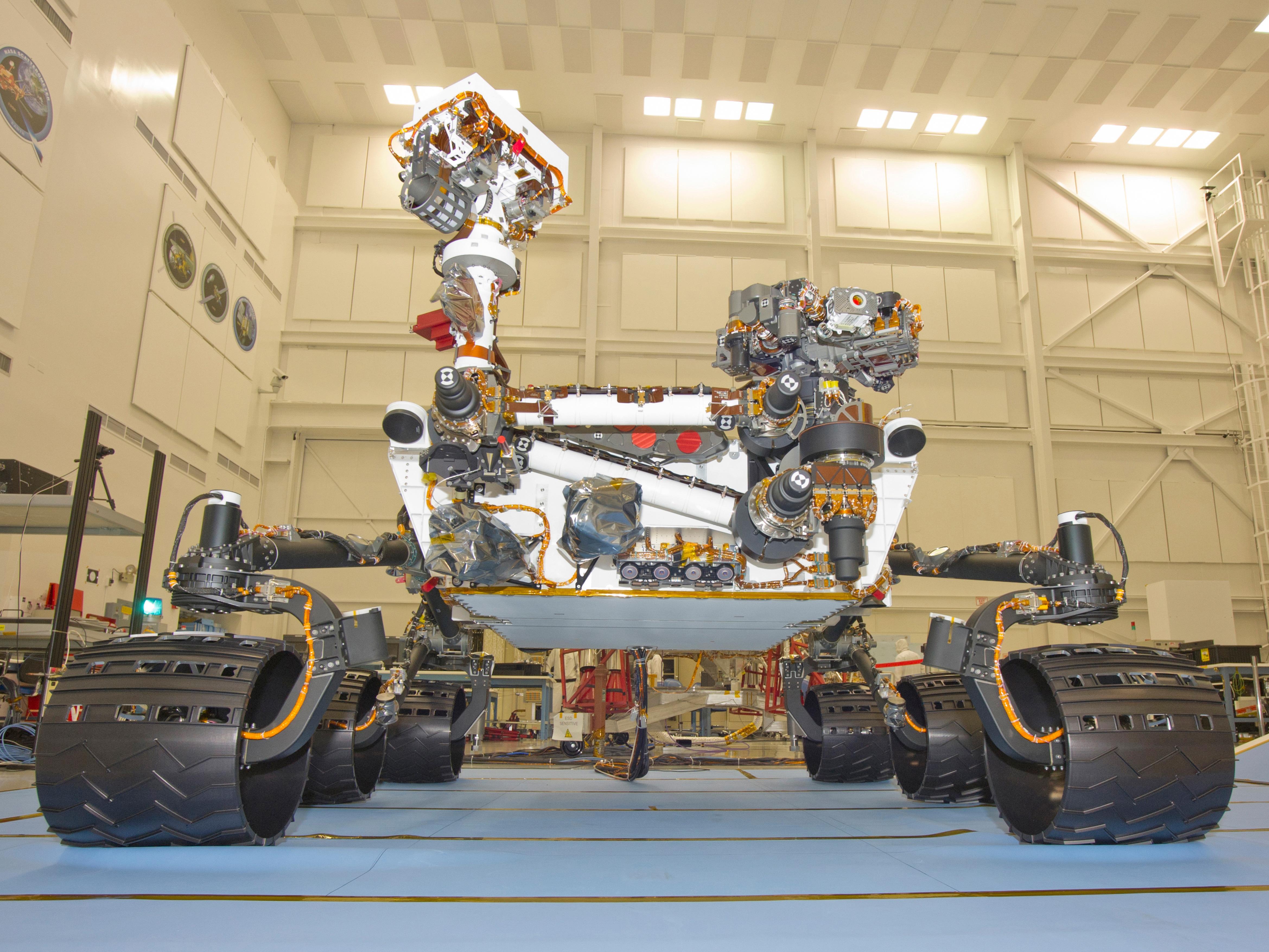
-

The MSL Assembly, Test and Launch Operations (ATLO) in the Jet Propulsion Laboratory.
-

Wheel size comparison: Sojourner, Mars Exploration Rover, Mars Science Laboratory.
-

Taken during mobility testing.
Payload
Ten instruments have been selected for development or production for the MSL rover Curiosity :
Cameras
The MastCam, MAHLI, and MARDI cameras are being developed by Malin Space Science Systems and they all share common design components, such as on-board electronic imaging processing boxes, 1600x1200 CCDs, and a RGB Bayer pattern filter.[47][48][49][50][51]
- MastCam: This system will provide multiple spectra and true color imaging with two cameras.[47] The cameras can take true color images at 1600x1200 pixels and up to 10 frames per second hardware-compressed, high-definition video at 720p (1280x720).[47] One camera will be the Medium Angle Camera (MAC) which has a 34 mm focal length, a 15 degree field of view, and can yield 22 cm/pixel scale at 1 km.[47] The other camera will be the Narrow Angle Camera (NAC) which has a 100 mm focal length, a 5.1-degree field of view, and can yield 7.4 cm/pixel scale at 1 km.[47] Malin is also developing a pair of Mastcams with zoom lens, which NASA may choose to fly instead of the fixed focal length cameras.[52] Each camera will have 8 GB of flash memory, which is capable of storing over 5,500 raw images, and can apply real time lossless or JPEG compression.[47] The cameras have an autofocus capability which allows them to focus on objects from 2.1 m (6 ft 11 in) to infinity.[50] Each camera will also have a RGB Bayer pattern filter with 8 filter positions.[47] In comparison to the 1024x1024 black & white panoramic cameras used on the Mars Exploration Rover (MER), the MAC MastCam will have 1.25X higher spatial resolution and the NAC MastCam will have 3.67X higher spatial resolution.[50]
- Mars Hand Lens Imager (MAHLI): This system will consist of a camera mounted to a robotic arm on the rover.[48] It will be used to acquire microscopic images of rock and soil. MAHLI can take true color images at 1600x1200 pixels with a resolution as high as 14.5 micrometers per pixel.[48] MAHLI has a 18.3 mm to 21.3 mm focal length and a 33.8 to 38.5 degree field of view.[48] MAHLI will have both white and UV LED illumination for imaging in darkness or imaging fluorescence.[48] MAHLI will also have mechanical focusing in a range from infinite to mm distances.[48] MAHLI can store either the raw images or do real time lossless predictive or JPEG compression.[48]
- MSL Mars Descent Imager (MARDI): During the descent to the Martian surface, MARDI will take color images at 1600x1200 pixels with a 1.3 millisecond exposure time starting at distances of about 3.7 km to near 5 meters from the ground and will take images at a rate of 5 frames per second for about 2 minutes.[49][53] MARDI has a pixel scale of 1.5 meters at 2 km to 1.5 millimeters at 2 meters and has a 90 degree circular field of view.[49] MARDI will have 8 GB of internal buffer memory which is capable of storing over 4,000 raw images.[49] MARDI imaging will allow the mapping of surrounding terrain and the location of landing.[49] JunoCam, for another spacecraft, is based on MARDI.[54]
ChemCam
ChemCam is a suite of remote sensing instruments, including the first laser-induced breakdown spectroscopy (LIBS) system to be used for planetary science and a remote micro-imager (RMI).[55][56] The LIBS instrument can target a rock or soil sample from up to 7 meters away, vaporizing a small amount of it and then collecting a spectrum of the light emitted by the vaporized rock.[55] An infrared laser with 1067 nm wavelength and a 5 nanosecond pulse will focus on a sub-millimeter spot with a power in excess of 10 megawatts, depositing 15mJ of energy.[55] Detection of the ball of luminous plasma will be done in the visible and near-UV and near-IR range, between 240 nm and 800 nm.[55] Using the same collection optics, the RMI provides context images of the LIBS analysis spots.[55] The RMI resolves 1 mm objects at 10 m distance, and has a field of view covering 20 cm at that distance.[55] The ChemCam instrument suite is being developed by the Los Alamos National Laboratory and the French CESR laboratory.[55][57][58][59] NASA's cost for ChemCam is approximately $10M, including an overrun of about $1.5M,[60] which is less than 1/200th of the total mission costs.[61] The flight model of the Mast Unit was delivered from the French CNES to Los Alamos National Laboratory and was able to deliver the engineering model to JPL in February 2008.[62]
Alpha-particle X-ray spectrometer (APXS)
Main article: APXSThis device will irradiate samples with alpha particles and map the spectra of X-rays that are re-emitted for determining the elemental composition of samples.[63] The APXS is a form of particle-induced X-ray emission (PIXE), which has previously been used by the Mars Pathfinder and the Mars Exploration Rovers.[63][64] The APXS is being developed by the Canadian Space Agency.[63] MacDonald Dettwiler (MDA), the Canadian aerospace company that build the Canadarm and RADARSAT, will be responsible for the engineering design and building of the APXS. The APXS science team includes members from the University of Guelph, the University of New Brunswick, the University of Western Ontario, NASA, the University of California, San Diego and Cornell University.
CheMin
Chemin stands for "Chemistry and Mineralogy" and is a X-Ray diffraction/X-Ray fluorescence instrument[65] that will quantify minerals and mineral structure of samples.[65] It is being developed by Dr. David Blake at NASA Ames Research Center and the NASA's Jet Propulsion Laboratory.[65][66]
Sample analysis at Mars (SAM)
The SAM instrument suite will analyze organics and gases from both atmospheric and solid samples.[67][68] It is being developed by the NASA Goddard Space Flight Center, the Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) of France's CNRS and Honeybee Robotics, along with many additional external partners.[67][69][70] The SAM suite consists of three instruments:
- The Quadrupole Mass Spectrometer (QMS) will detect gases sampled from the atmosphere or those released from solid samples by heating.[67]
- The Gas Chromatograph (GC) will be used to separate out individual gases from a complex mixture into molecular components with a mass range of 2–235 u.[67]
- The Tunable Laser Spectrometer (TLS) will perform precision measurements of oxygen and carbon isotope ratios in carbon dioxide (CO2) and methane (CH4) in the atmosphere of Mars in order to distinguish between a geochemical and a biological origin.[67][70][71][72]
The SAM also has three subsystems: The chemical separation and processing laboratory (CSPL), for enrichment and derivatization of the organic molecules of the sample; the sample manipulation system (SMS) for transporting powder delivered from the MSL drill to a SAM inlet and into one of 74 sample cups.[67] The SMS then moves the sample to the SAM oven to release gases by heating to up to 1000 oC;[67][73] and the wide range pumps (WRP) subsystem to purge the QMS, TLS, and the CPSL.
Radiation assessment detector (RAD)
This instrument will characterize the broad spectrum of radiation found near the surface of Mars for purposes of determining the viability and shielding needs for human explorers.[74] Funded by the Exploration Systems Mission Directorate at NASA Headquarters and the German space agency, DLR, RAD was developed by Southwest Research Institute (SwRI) and the extraterrestrial physics group at Christian-Albrechts-Universität zu Kiel, Germany.[74]
Dynamic albedo of neutrons (DAN)
A pulsed neutron source and detector for measuring hydrogen or ice and water at or near the Martian surface, provided by the Russian Federal Space Agency.[75]
Rover environmental monitoring station (REMS)
Meteorological package and an ultraviolet sensor provided by the Spanish Ministry of Education and Science, with Finnish Meteorological Institute as a partner.[76][77] It will be mounted on the camera mast and measure atmospheric pressure, humidity, wind currents and direction, air and ground temperature and ultraviolet radiation levels.[76]
MSL entry descent and landing instrumentation (MEDLI)
The MEDLI project’s main objective is to measure aerothermal environments, sub-surface heat shield material response, vehicle orientation, and atmospheric density for the atmospheric entry through the sensible atmosphere down to heat shield separation of the Mars Science Laboratory entry vehicle.[78][79] The MEDLI instrumentation suite will be installed in the heatshield of the MSL entry vehicle.[78][79] The acquired data will support future Mars missions by providing measured atmospheric data to validate Mars atmosphere models and clarify the design margins on future Mars missions.[78][79] MEDLI instrumentation consists of three main subsystems: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) and the Sensor Support Electronics (SSE).[78][79]
Hazard avoidance cameras (Hazcams)
The MSL will use two pairs of black and white navigation cameras located on the front left and right and rear left and right of the rover.[80][81] The Hazard Avoidance Cameras (also called Hazcams) are used for autonomous hazard avoidance during rover drives and for safe positioning of the robotic arm on rocks and soils.[80] The cameras will use visible light to capture stereoscopic three-dimensional (3-D) imagery.[80] The cameras have a 120 degree field of view and map the terrain at up to 10 feet (3 meters) in front of the rover.[80] This imagery safeguards against the rover inadvertently crashing into unexpected obstacles, and works in tandem with software that allows the rover to make its own safety choices.[80]
The MSL will use a pair of black and white navigation cameras mounted on the mast to support ground navigation.[81][82] The cameras will use visible light to capture stereoscopic 3-D imagery.[82] The cameras have a 45 degree field of view.[82]
Launch vehicle
The MSL will be launched from Cape Canaveral Air Force Station Space Launch Complex 41 using the Atlas V 541 provided by United Launch Alliance. This two stage rocket which includes a 3.8 m (12 ft) common core booster (CCB) powered by a single single RD-180 engine, four solid rocket boosters (SRB), and one Centaur III with a 5.4 m (18 ft) diameter payload fairing. This vehicle is capable of launching up to 17,597 lb (7,982 kg) to geostationary transfer orbit. The Atlas V has also been used to launch the Mars Reconnaissance Orbiter and New Horizons.[3] [83]
The first and second stage along with the solid rocket motors were stacked on October 9 near the launch pad.[84] The faring containing MSL was transported to the launch pad on November 3.[85]
Landing system
Landing a large mass on Mars is a difficult challenge. The atmosphere is thick enough to prevent rockets being used to provide significant deceleration, as flying into the plume at supersonic speed is notoriously unstable.[86] Also, the atmosphere is too thin for parachutes and aerobraking alone to be effective. [86] Although some previous missions have used airbags to cushion the shock of landing, the MSL is too large for this to be an option.
Curiosity will be set down on the Martian surface using a new high-precision entry, descent, and landing (EDL) system that will place it within a 20 km (12 mi) landing ellipse, in contrast to the 150 by 20 km (93 by 12 mi) landing ellipse of the landing systems used by the Mars Exploration Rovers.[87]
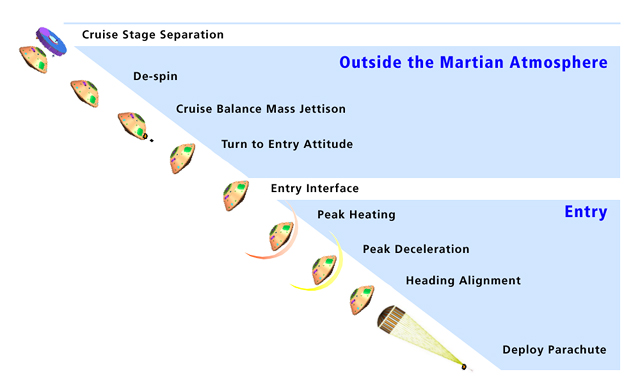
For this, the MSL will employ a combination of several systems in a precise order, where the entry, descent and landing sequence will break down into four parts.[88][89]
-

Curiosity landing diagram for outside Martian atmosphere and for entry.
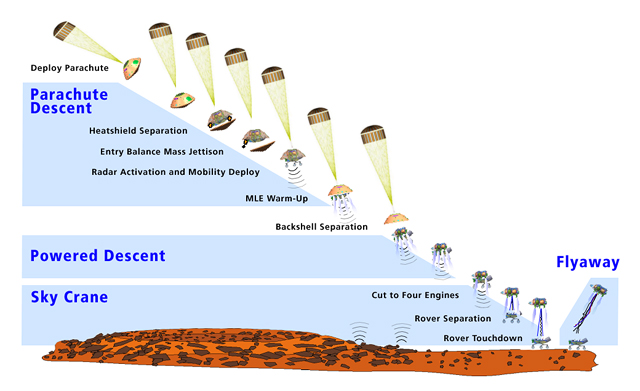
-
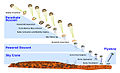
Curiosity landing diagram for parachute descent, powered descent, and sky crane.
-

The MSL test parachute. The humans in the bottom right corner of the image are included for scale.
-

Artist's concept of the Curiosity rover, as it is being lowered by the sky crane from the rocket-powered descent stage.
Guided entry
The rover is folded up within an aeroshell which protects it during the travel through space and during the atmospheric entry at Mars. Atmospheric entry is accomplished using a Phenolic Impregnated Carbon Ablator (PICA) heat shield. The 4.5 m (15 ft) diameter heat shield, which will be the largest heat shield ever flown in space,[90] reduces the velocity of the spacecraft by ablation against the Martian atmosphere, from the interplanetary transit velocity of 5.3 to 6 km/s (3.3 to 3.7 mi/s) down to approximately Mach-2, where parachute deployment is possible. Much of the reduction of the landing precision error is accomplished by an entry guidance algorithm, similar to that used by the astronauts returning to Earth in the Apollo space program. This guidance uses the lifting force experienced by the aeroshell to "fly out" any detected error in range and thereby arrive at the targeted landing site. In order for the aeroshell to have lift, its center of mass is offset from the axial centerline which results in an off-center trim angle in atmospheric flight, again similar to the Apollo Command Module. This is accomplished by a series of ejectable ballast masses. The lift vector is controlled by four sets of two Reaction Control System (RCS) thrusters that produce approximately 500 N of thrust per pair. This ability to change the pointing of the direction of lift allows the spacecraft to react to the ambient environment, and steer toward the landing zone. Prior to parachute deployment the entry vehicle must first eject the ballast mass such that the center of gravity offset is removed. Parachute will deploy at about 10 km (6.2 mi) altitude at about 470 m/s (1,500 ft/s).[87]
Parachute descent
When the entry phase is complete and the capsule has slowed to Mach 2 and at about 7 km altitude, the heat shield will separate and fall away. The Mars Science Laboratory will then deploy a supersonic parachute,[87] as was done by previous landers such as Viking, Mars Pathfinder and the Mars Exploration Rovers.
In March and April 2009 the parachute for the MSL was tested in the world's largest wind tunnel and passed flight-qualification testing.[91] The parachute has 80 suspension lines, is over 165 feet (50 meters) long, and is about 51 feet (16 meters) in diameter.[91] The parachute is capable of being deployed at Mach 2.2 and can generate up to 289 kN (65,000 pounds) of drag force in the Martian atmosphere.[91] A camera on the bottom of the rover will acquire 5 frames/min below 3.7 km.
Powered descent
Following the parachute braking, at about 1.8 km altitude, still travelling at about 100 m/s, the rover and descent stage drop out of the aeroshell.[87] The descent stage is a platform above the rover with variable thrust mono propellant hydrazine rocket thrusters on arms extending around this platform to slow the descent. Each of the 8 rockets on this stage produce up to 3.1 kN (700 pounds) of thrust and were derived from those used on the Viking landers.[92] Meanwhile, the rover will transform from its stowed flight configuration to a landing configuration while being lowered beneath the descent stage by the "sky crane" system.
Sky crane
The sky crane system will lower the rover to a soft landing –wheels down– on the surface of Mars.[87] This consists of 3 bridles lowering the rover and an umbilical cable carrying electrical signals between the descent stage and rover. At roughly 7.5 m (25 ft) below the descent stage the sky crane system slows to a halt and the rover touches down. After the rover touches down it waits 2 seconds to confirm that it is on solid ground and fires several pyros (small explosive devices) activating cable cutters on the bridle and umbilical cords to free itself from the descent stage. The descent stage promptly flies away to a crash landing, and the rover gets ready to roam Mars. The planned sky crane powered descent landing system has never been used in actual missions before.[93]
Landing site
 Curiosity will land on a smooth surface inside Gale Crater, noted by the yellow ellipse. Two destinations of high interest, deep canyons within the crater, are pointed out by yellow arrows.
Curiosity will land on a smooth surface inside Gale Crater, noted by the yellow ellipse. Two destinations of high interest, deep canyons within the crater, are pointed out by yellow arrows.Based on rankings of the proposed sites by investigators working on the project, the Gale Crater was selected by NASA administrators as the landing site.[8][9][10] Within Gale Crater is a mountain of layered rocks, rising about 3 mi (4.8 km) above the crater floor, that Curiosity will investigate. The landing site (marked by the yellow ellipse in the image) is a smooth region inside the crater in front of the mountain. The landing site is elliptical, 12.4 by 15.5 mi (20.0 by 24.9 km). Gale Crater diameter is 96 mi (154 km).
The landing site contains material washed down from the wall of the crater, which will provide scientists with the opportunity to investigate the rocks that form the bedrock in this area. The landing ellipse also contains a rock type that is very dense and very bright colored; it is unlike any rock type previously investigated on Mars. It may be an ancient playa lake deposit, and it will likely be the mission's first target in checking for the presence of organic molecules.
However, the area of top scientific interest for Curiosity lies at the base of the mound, just at the edge of the landing ellipse and beyond a dark dune field. Here, orbiting instruments have detected signatures of both clay minerals and sulfate salts. Scientists studying Mars have several hypotheses about how these minerals reflect changes in the Martian environment, particularly changes in the amount of water on the surface of Mars. The rover will use its full instrument suite to study these minerals and how they formed. These rocks are also a prime target in checking for organic molecules, since these environments may have been able to support microbial life.
Two canyons (marked by yellow arrows in the image) were cut in the mound through the layers containing clay minerals and sulfate salts after deposition of the layers. These canyons expose layers of rock representing tens or hundreds of millions of years of environmental change. Curiosity may be able to investigate these layers in the canyon closest to the landing ellipse, gaining access to a long history of environmental change on the planet. The canyons also contain sediment that was transported by the water that cut the canyons. This sediment interacted with the water, and the environment at that time may have been habitable. Thus, the rocks deposited at the mouth of the canyon closest to the landing ellipse form the third target in the search for organic molecules.
Selection
The essential issue when selecting an optimum landing site is to identify a particular geologic environment, or set of environments, that would support microbial life. To mitigate the risk of disappointment and ensure the greatest chance for science success, interest is placed at the greatest number of possible science objectives at a chosen landing site. Thus, a landing site with morphologic and mineralogic evidence for past water, is better than a site with just one of these criteria. Furthermore, a site with spectra indicating multiple hydrated minerals is preferred; clay minerals and sulfate salts would constitute a rich site. Hematite, other iron oxides, sulfate minerals, silicate minerals, silica, and possibly chloride minerals have all been suggested as possible substrates for fossil preservation. Indeed, all are known to facilitate the preservation of fossil morphologies and molecules on Earth.[94] Difficult terrain is the best candidate for finding evidence of livable conditions, and engineers must be sure the rover can safely reach the site and drive within it.[95]
Current engineering constraints call for a landing site less than 45° from the Martian equator, and less than 1 km above the reference datum.[96] At the first MSL Landing Site workshop, 33 potential landing sites were identified.[97] By the second workshop in late 2007, the list had grown to include almost 50 sites,[98] and by the end of the workshop, the list was reduced to six;[99][100][101] in November 2008, project leaders at a third workshop reduced the list to these four landing sites:[102][103][104][105]
Name Location Elevation Notes Eberswalde Crater Delta 23°52′S 326°44′E / 23.86°S 326.73°E −1,450 metres (−4,757.2 ft) ancient river delta[106] Holden Crater Fan 26°22′S 325°06′E / 26.37°S 325.10°E −1,940 metres (−6,364.8 ft) dry lake bed[107] Gale Crater 4°29′S 137°25′E / 4.49°S 137.42°E −4,451 metres (−2.7657 mi) features a 3-mile-tall (4.8 km) mountain
of layered material near center[108]Mawrth Vallis Site 2 24°01′N 341°02′E / 24.01°N 341.03°E −2,246 metres (−7,368.8 ft) channel carved by catastrophic floods[109] On August 20, 2009, NASA sent out a call for additional landing site proposals and issued another request for proposals on November 16, 2010. A fourth landing site workshop was held in late September 2010.[110] A fifth and final workshop took place during 16–18 May 2011.[111]
On July 22, 2011, it was announced that Gale Crater had been selected as the landing site of the Mars Science Laboratory mission.[5][8][9][10]
See also
References
- ^ NASA - Mars Science Laboratory, the Next Mars Rover
- ^ Allard Beutel (19 November 2011). "NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26". NASA. http://mars.jpl.nasa.gov/news/whatsnew/index.cfm?FuseAction=ShowNews&NewsID=1185. Retrieved 21 November 2011.
- ^ a b Martin, Paul K.. "NASA’S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019)". NASA OFFICE OF INSPECTOR GENERAL. http://oig.nasa.gov/audits/reports/FY11/IG-11-019.pdf.
- ^ a b MSL Science Corner: Landing Site Selection
- ^ a b c d Guy Webster. "Geometry Drives Selection Date for 2011 Mars Launch". NASA/JPL-Caltech. http://www.jpl.nasa.gov/news/news.cfm?release=2010-171. Retrieved 22 September 2011.
- ^ Rover Fast Facts
- ^ Mars Science Laboratory: Mission Timeline
- ^ a b c d Webster, Guy; Brown, Dwayne (22 July 2011). "NASA's Next Mars Rover To Land At Gale Crater". NASA JPL. http://www.jpl.nasa.gov/news/news.cfm?release=2011-222#1. Retrieved 2011-07-22.
- ^ a b c d Chow, Dennis (22 July 2011). "NASA's Next Mars Rover to Land at Huge Gale Crater". Space.com. http://www.space.com/12394-nasa-mars-rover-landing-site-unveiled.html. Retrieved 2011-07-22.
- ^ a b c d Amos, Jonathan (22 July 2011). "Mars rover aims for deep crater". BBC News. http://www.bbc.co.uk/news/science-environment-14249524. Retrieved 2011-07-22.
- ^ a b c "Name NASA's Next Mars Rover". NASA/JPL. 2009-05-27. http://marsrovername.jpl.nasa.gov/. Retrieved 2009-05-27.
- ^ a b "NASA Selects Student's Entry as New Mars Rover Name". NASA/JPL. 2009-05-27. http://www.nasa.gov/mission_pages/msl/msl-20090527.html. Retrieved 2009-05-27.
- ^ "NASA's Shuttle and Rocket Launch Schedule". NASA. 2010-10-27. http://www.nasa.gov/missions/highlights/schedule.html. Retrieved 2010-09-02.
- ^ "Mars Science Laboratory: Mission". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/mission/. Retrieved 2010-03-12.
- ^ a b c d e Watson, Traci (2008-04-14). "Troubles parallel ambitions in NASA Mars project". USA Today. http://www.usatoday.com/tech/science/space/2008-04-13-mars_N.htm. Retrieved 2009-05-27.
- ^ Chang, Kenneth (2008-12-04). "NASA Delays Next Mars Rover Mission". The New York Times. http://www.nytimes.com/2008/12/05/science/space/05mars.html. Retrieved 2009-05-27.
- ^ "Science Objectives of the MSL". JPL. NASA. http://marsprogram.jpl.nasa.gov/msl/science/objectives.html. Retrieved 2009-05-27.[dead link]
- ^ Mars Science Laboratory Mission Profile
- ^ "NASA Mars Rover Will Check for Ingredients of Life". NASA. January 2011. http://www.nasa.gov/mission_pages/msl/news/msl20110118.html. Retrieved 2011-01-25.
- ^ Frank Morring; Jefferson Morris (2008-10-03). "Mars Science Lab In Doubt". Aviation Week. http://www.aviationweek.com/aw/generic/story.jsp?id=news/Balloon100308.xml&headline=Mars%20Science%20Lab%20In%20Doubt&channel=space. Retrieved 2009-05-27.
- ^ Mars Science Laboratory: Still Alive, For Now. 10 October 2008. Universe Today.
- ^ MSL Technical and Replan Status. Richard Cook. (January 9, 2009)
- ^ "Next NASA Mars Mission Rescheduled For 2011". NASA/JPL. 2008-12-04. http://marsprogram.jpl.nasa.gov/msl/newsroom/pressreleases/20081204a.html. Retrieved 2008-12-04.
- ^ "Mars Science Laboratory: the budgetary reasons behind its delay". The Space Review. 2009-03-02. http://www.thespacereview.com/article/1318/1. Retrieved 2010-01-26.
- ^ "Mars Science Laboratory: the technical reasons behind its delay". The Space Review. 2009-03-02. http://www.thespacereview.com/article/1319/1. Retrieved 2010-01-26.
- ^ "NASA Invites Students to Name New Mars Rover". NASA/JPL. 2008-11-18. http://www.nasa.gov/mission_pages/mars/news/msl-20081118.html. Retrieved 2009-05-27.
- ^ NASA - Curiosity
- ^ "Next Mars Rover Sports a Set of New Wheels". NASA/JPL. http://www.nasa.gov/mission_pages/msl/msl20100701.html.
- ^ "Nasa committed to Mars rover plan". BBC News. 2008-10-11. http://news.bbc.co.uk/1/hi/sci/tech/7664965.stm. Retrieved 2010-05-12.
- ^ Mars Rovers: Pathfinder, MER (Spirit and Opportunity), and MSL (video). Pasadena, California. 12 April 2008. http://www.youtube.com/watch?v=D7kBTZAGhbs. Retrieved 22 September 2011.
- ^ MER Launch Press Kit
- ^ "Mars Science Laboratory — Homepage". NASA. http://marsprogram.jpl.nasa.gov/msl/overview/. Retrieved 22 September 2011.
- ^ a b c "Multi-Mission Radioisotope Thermoelectric Generator". NASA/JPL. 2008-01-01. http://www.ne.doe.gov/pdfFiles/MMRTG_Jan2008.pdf. Retrieved 2009-09-07.
- ^ a b c "Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration". NASA/JPL. 2006-04-18. http://www.jpl.nasa.gov/news/fact_sheets/mars-power-heating.pdf. Retrieved 2009-09-07.
- ^ a b "Technologies of Broad Benefit: Power". Archived from the original on 2008-06-14. http://web.archive.org/web/20080614071650/http://marsprogram.jpl.nasa.gov/msl/technology/tech_power.html. Retrieved 2008-09-20.
- ^ "Mars Science Laboratory - Technologies of Broad Benefit: Power". NASA/JPL. http://mars.jpl.nasa.gov/msl/mission/technology/technologiesofbroadbenefit/power/. Retrieved 23 April 2011.
- ^ Ajay K. Misra (2006-06-26). "Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power". NASA/JPL. http://pdf.aiaa.org/preview/CDReadyMIECEC06_1309/PV2006_4187.pdf. Retrieved 2009-05-12.
- ^ a b Susan Watanabe (2009-08-09). "Keeping it Cool (...or Warm!)". NASA/JPL. http://www1.nasa.gov/mission_pages/mars/images/20081209_msl.html. Retrieved 19 January 2011.
- ^ "Mars Science Laboratory Mission Page - Rover "Brains"". Jet Propulsion Laboratory. http://marsprogram.jpl.nasa.gov/msl/mission/rover/brains/.
- ^ a b c d e "Mars Science Laboratory: Mission: Rover: Brains". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/mission/rover/brains/. Retrieved 2009-03-27.
- ^ Bajracharya, Max; Mark W. Maimone; Daniel Helmick (December 2008). "Autonomy for Mars rovers: past, present, and future". Computer 41 (12): 45. ISSN 0018-9162.
- ^ "BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions" (Press release). BAE Systems. 2008-06-17. http://www.baesystems.com/Newsroom/NewsReleases/autoGen_108517143749.html. Retrieved 2008-11-17.
- ^ "E&ISNow — Media gets closer look at Manassas". BAE Systems. 2008-08-01. http://www.baesystems.com/BAEProd/groups/public/documents/bae_publication/bae_pdf_eis_2008-08-1.pdf. Retrieved 2008-11-17.[dead link]
- ^ "RAD750 radiation-hardened PowerPC microprocessor" (PDF). BAE Systems. 2008-07-01. http://www.baesystems.com/BAEProd/groups/public/@businesses/@eandis/documents/bae_publication/bae_pdf_eis_rad750_pwr_pc_mp.pdf. Retrieved 2009-09-07.
- ^ "RAD6000 Space Computers" (PDF). BAE Systems. 2008-06-23. http://www.baesystems.com/BAEProd/groups/public/documents/bae_publication/bae_pdf_eis_sfrwre.pdf. Retrieved 2009-09-07.
- ^ Andre Makovsky, Peter Ilott, Jim Taylor (2009). "Mars Science Laboratory Telecommunications System Design". JPL. http://descanso.jpl.nasa.gov/DPSummary/Descanso14_MSL_Telecom.pdf.
- ^ a b c d e f g "Mast Camera (Mastcam)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/Mastcam/. Retrieved 2009-03-18.
- ^ a b c d e f g "Mars Hand Lens Imager (MAHLI)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/MAHLI/. Retrieved 2009-03-23.
- ^ a b c d e "Mars Descent Imager (MARDI)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/MARDI/. Retrieved 2009-04-03.
- ^ a b c "Mars Science Laboratory (MSL): Mast Camera (Mastcam): Instrument Description". Malin Space Science Systems. http://www.msss.com/msl/mastcam/MastCam_description.html. Retrieved 2009-04-19.
- ^ "Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters". SpaceRef Interactive. http://www.marstoday.com/news/viewsr.html?pid=25991.
- ^ "Mars Science Laboratory (MSL) Mast Camera (Mastcam)". http://www.msss.com/all_projects/msl-mastcam.php.
- ^ "Mars Descent Imager (MARDI) Update". Malin Space Science Systems. November 12, 2007. http://www.msss.com/msl/mardi/news/12Nov07/index.html.
- ^ Malin Space Science Systems - Junocam, Juno Jupiter Orbiter
- ^ a b c d e f g "MSL Science Corner: Chemistry & Camera (ChemCam)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/ChemCam/. Retrieved 2009-09-09.
- ^ Spacecraft: Surface Operations Configuration: Science Instruments: ChemCam
- ^ Salle B., Lacour J. L., Mauchien P., Fichet P., Maurice S., Manhes G. (2006). "Comparative study of different methodologies for quantitative rock analysis by Laser-Induced Breakdown Spectroscopy in a simulated Martian atmosphere" (PDF). Spectrochimica Acta Part B-Atomic Spectroscopy 61 (3): 301–313. Bibcode 2006AcSpe..61..301S. doi:10.1016/j.sab.2006.02.003. http://www.lpi.usra.edu/meetings/lpsc2005/pdf/1580.pdf.
- ^ CESR presentation on the LIBS
- ^ ChemCam fact sheet
- ^ Wiens R.C., Maurice S. (2008). "Corrections and Clarifications, News of the Week". Science 322 (5907): 1466. doi:10.1126/science.322.5907.1466a. PMID 19056960. http://www.sciencemag.org.
- ^ Wiens R.C., Maurice S. (2008). "ChemCam's Cost a Drop in the Mars Bucket". Science 322 (5907): 1464. doi:10.1126/science.322.5907.1464a. PMID 19056957. http://www.sciencemag.org.
- ^ ChemCam Status April, 2008
- ^ a b c "MSL Science Corner: Alpha Particle X-ray Spectrometer (APXS)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/APXS/. Retrieved 2009-09-09.
- ^ R. Rieder, R. Gellert, J. Brückner, G. Klingelhöfer, G. Dreibus, A. Yen, S. W. Squyres (2003). "The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers". J. Geophysical Research 108: 8066. Bibcode 2003JGRE..108.8066R. doi:10.1029/2003JE002150.
- ^ a b c "MSL Science Corner: Chemistry & Mineralogy (CheMin)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/CheMin/. Retrieved 2009-09-09.
- ^ Sarrazin P., Blake D., Feldman S., Chipera S., Vaniman D., Bish D. (2005). "Field deployment of a portable X-ray diffraction/X-ray fluorescence instrument on Mars analog terrain". Powder Diffraction 20 (2): 128–133. Bibcode 2005PDiff..20..128S. doi:10.1154/1.1913719.
- ^ a b c d e f g "MSL Science Corner: Sample Analysis at Mars (SAM)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/SAM/. Retrieved 2009-09-09.
- ^ Overview of the SAM instrument suite
- ^ Cabane M., Coll P., Szopa C., Israel G., Raulin F., Sternberg R., Mahaffy P., Person A., Rodier C., Navarro-Gonzalez R., Niemann H., Harpold D., Brinckerhoff W. (2004). "Did life exist on Mars? Search for organic and inorganic signatures, one of the goals for "SAM" (sample analysis at Mars)". Source: Mercury, Mars and Saturn Advances in Space Research 33 (12): 2240–2245.
- ^ a b "Sample Analysis at Mars (SAM) Instrument Suite". NASA. October 2008. http://ael.gsfc.nasa.gov/marsSAM.shtml. Retrieved 2008-10-09.
- ^ Tenenbaum, David (June 09, 2008). "Making Sense of Mars Methane". Astrobiology Magazine. http://www.astrobio.net/news/modules.php?op=modload&name=News&file=article&sid=2765&mode=thread&order=0&thold=0. Retrieved 2008-10-08.
- ^ Tarsitano, C.G. and Webster, C.R. (2007). "Multilaser Herriott cell for planetary tunable laser spectrometers". Applied Optics 46 (28): 6923–6935. Bibcode 2007ApOpt..46.6923T. doi:10.1364/AO.46.006923.
- ^ Tom Kennedy; Erik Mumm; Tom Myrick; Seth Frader-Thompson. "Optimization of a mars sample manipulation system through concentrated functionality" (PDF). http://pdf.aiaa.org/preview/CDReadyMSPACE06_1393/PV2006_7402.pdf.
- ^ a b "SwRI Radiation Assessment Detector (RAD) Homepage". Southwest Research Institute. http://www.boulder.swri.edu/~hassler/rad/. Retrieved 2011-01-19.
- ^ "MSL Science Corner: Dynamic Albedo of Neutrons (DAN)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/DAN/. Retrieved 2009-09-09.
- ^ a b "MSL Science Corner: Rover Environmental Monitoring Station (REMS)". NASA/JPL. http://msl-scicorner.jpl.nasa.gov/Instruments/REMS/. Retrieved 2009-09-09.
- ^ "Mars Science Laboratory Fact Sheet". NASA/JPL. http://mars.jpl.nasa.gov/msl/news/pdfs/MSL_Fact_Sheet-20100916.pdf. Retrieved 2011-06-20.
- ^ a b c d Michael Wright (2007-05-01). "Science Overview System Design Review (SDR)". NASA/JPL. http://www.mrc.uidaho.edu/~atkinson/SeniorDesign/ThermEx/MEDLI/MEDLI_SDR_Project_Overview.pdf. Retrieved 2009-09-09.
- ^ a b c d Michael Wright (2007-05-01). "Science Overview System Design Review (SDR)". NASA/JPL. http://www.mrc.uidaho.edu/~atkinson/SeniorDesign/ThermEx/MEDLI/MEDLI_SDR_Science_Overview.pdf. Retrieved 2009-09-09.
- ^ a b c d e "Mars Science Laboratory: Mission: Rover: Eyes and Other Senses: Four Engineering Hazcams (Hazard Avoidance Cameras)". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/mission/rover/eyesandother/. Retrieved 2009-04-04.
- ^ a b "Mars Science Laboratory Rover in the JPL Mars Yard". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/multimedia/interactives/photosynth/. Retrieved 2009-05-10.
- ^ "Mars Science Laboratory: Mission: Launch Vehicle". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/mission/launchvehicle/. Retrieved 2009-04-01.
- ^ Assembling Curiosity’s Rocket to Mars
- ^ NASA's new Mars rover reaches Florida launch pad | Reuters
- ^ a b "The Mars Landing Approach: Getting Large Payloads to the Surface of the Red Planet". Universe Today. http://www.universetoday.com/2007/07/17/the-mars-landing-approach-getting-large-payloads-to-the-surface-of-the-red-planet/. Retrieved 2008-10-21.
- ^ a b c d e "Final Minutes of Curiosity's Arrival at Mars". NASA/JPL. http://www.nasa.gov/mission_pages/msl/multimedia/gallery/pia13282.html. Retrieved 2011-04-08.
- ^ "Mission Timeline: Entry, Descent, and Landing". NASA and JPL. Archived from the original on 2008-06-19. http://web.archive.org/web/20080619055613/http://marsprogram.jpl.nasa.gov/msl/mission/tl_edl.html. Retrieved 2008-10-07.
- ^ "Mars Science Laboratory Entry, Descent, and Landing Triggers". IEEE. http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=04161341. Retrieved 2008-10-21.
- ^ NASA, Large Heat Shield for Mars Science Laboratory, 07.10.09 (accessed Mar 26 2010)
- ^ a b c "Mars Science Laboratory Parachute Qualification Testing". NASA/JPL. http://marsprogram.jpl.nasa.gov/msl/news/index.cfm?FuseAction=ShowNews&NewsID=90. Retrieved 2009-04-15.
- ^ "Aerojet Ships Propulsion for Mars Science Laboratory". Aerojet. http://aerojet.com/news2.php?action=fullnews&id=135. Retrieved 2010-12-18.
- ^ Sky crane concept video
- ^ "Landing — Discussion Points and Science Criteria" (Microsoft Word). MSL — Landing Sites Workshop. July 15. http://marsoweb.nas.nasa.gov/landingsites/msl2009/memoranda/sites_jul08/Discussion%20Points-Science%20Criteria.doc. Retrieved 2008-10-21.
- ^ "Survivor: Mars — Seven Possible MSL Landing Sites". Jet Propulsion Laboratory (NASA). 18 September 2008. http://mars.jpl.nasa.gov/msl/spotlight/20080918.html. Retrieved 2008-10-21.[dead link]
- ^ "MSL Workshop Summary" (PDF). 2007-04-27. http://marsoweb.nas.nasa.gov/landingsites/msl/workshops/1st_workshop/docs/MSL_workshop_summary.pdf. Retrieved 2007-05-29.
- ^ "MSL Landing Site Selection User’s Guide to Engineering Constraints" (PDF). 2006-06-12. http://marsoweb.nas.nasa.gov/landingsites/msl/memoranda/MSL_Eng_User_Guide_v3.pdf. Retrieved 2007-05-29.
- ^ "Second MSL Landing Site Workshop". http://marsoweb.nas.nasa.gov/landingsites/msl2009/workshops/2nd_workshop/2nd_announcement.html.
- ^ "MSL Workshop Voting Chart" (PDF). September 18, 2008. http://marsoweb.nas.nasa.gov/landingsites/msl2009/workshops/3rd_workshop/talks/MSL_Wkshp3_vote_chart.pdf.
- ^ GuyMac (2008-01-04). "Reconnaissance of MSL Sites". HiBlog. http://hirise.lpl.arizona.edu/HiBlog/?p=131. Retrieved 2008-10-21.
- ^ "Mars Exploration Science Monthly Newsletter" (PDF). August 1, 2008. http://mepag.jpl.nasa.gov/calendar/MEPAG_Newsletter(08_19C3B3.pdf.
- ^ "Site List Narrows For NASA's Next Mars Landing". MarsToday. 2008-11-19. http://www.marstoday.com/news/viewpr.rss.html?pid=26970. Retrieved 2009-04-21.
- ^ "Current MSL Landing Sites". NASA. http://webgis.wr.usgs.gov/msl/. Retrieved 2010-01-04.
- ^ "Looking at Landing Sites for the Mars Science Laboratory". YouTube. NASA/JPL. 2009-05-27. http://www.youtube.com/watch?v=sfYK8r6tlrg. Retrieved 2009-05-28.
- ^ "Final 7 Prospective Landing Sites". NASA. February 19, 2009. http://marsoweb.nas.nasa.gov/landingsites/index.html. Retrieved 2009-02-09.
- ^ Mars Science Laboratory: Possible MSL Landing Site: Eberswalde Crater
- ^ Mars Science Laboratory: Possible MSL Landing Site: Holden Crater
- ^ Mars Science Laboratory: Possible MSL Landing Site: Gale Crater
- ^ Mars Science Laboratory: Possible MSL Landing Site: Mawrth Vallis
- ^ Presentations for the Fourth MSL Landing Site Workshop September 2010
- ^ Second Announcement for the Final MSL Landing Site Workshop and Call for Papers March 2011
Further reading
M. K. Lockwood (2006). "Introduction: Mars Science Laboratory: The Next Generation of Mars Landers And The Following 13 articles" (.PDF). Journal of Spacecraft and Rockets 43 (2): 257–257. Bibcode 2006JSpRo..43..257L. doi:10.2514/1.20678. http://pdf.aiaa.org/jaPreview/JSR/2006/PVJA20678.pdf.
External links
- MSL Home Page
- Send Your Name To Mars
- MSL - Demo, reported by The Planetary Society.
- MSL - Entry, Descent & Landing (EDL) - Description. (PDF)
- ChemCam Mounted with LIBS for Classifying Carbonate Minerals on Mars (PDF)
- MSL Press Kit
Spacecraft missions to Mars Flybys 
Orbiters Mariner 9 · Mars 2 · 3 · 5 · Viking 1 · 2 · Phobos 2 · Mars Global Surveyor · 2001 Mars Odyssey · Mars Express · Mars Reconnaissance Orbiter · Fobos-Grunt · Yinghuo-1
Landers Rovers Planned missions Mars Science Laboratory (2011) · MetNet · MAVEN (2013) ·
ExoMars static lander and rover · ExoMars Trace Gas Orbiter (2016) · Northern LightUnplanned missions Related topics Exploration · Colonization · Failed Mars missions · Mars Scout Program
Bold italics indicate active missionsFuture spaceflights Manned Shenzhou 9 · Shenzhou 10 · Soyuz TMA-03M · Soyuz TMA-05M · Soyuz TMA-06M · Soyuz TMA-07M · Soyuz TMA-08M · Soyuz TMA-09M · Soyuz TMA-10M · Soyuz TMA-11M
Unmanned 2011COTS Demo Flight 2 · Hypersonic Flight Experiment · HTV-3 · LARES · Mars Science Laboratory · Progress M-14M · RISAT-1 · Yinghuo-1
2012Aditya · Astrosat · BARREL · Cornell University Satellite · COTS Demo Flight 3/Dragon CRS-1 · Dragon CRS-2 · Dragon CRS-3 · Dragon CRS-4 · Cygnus 1 · Edoardo Amaldi ATV · European Robotic Arm · Nauka · Nuclear Spectroscopic Telescope Array · Progress M-15M · Progress M-16M · Progress M-17M · Progress M-18M · Progress M-19M · Progress M-20M · Radiation Belt Storm Probes
2013Chang'e 3 · Don Quijote (spacecraft) · Albert Einstein ATV · Dragon CRS-5 · GeoEye-2 · HTV-5 · MAVEN · Tiangong 2 ·
2014+BepiColombo · Chandrayaan-2 · Gravity and Extreme Magnetism SMEX · Hayabusa 2 · HTV-6 · Luna-Glob 2 · Luna-Grunt · HTV-7 · Luna-Glob 1 ExoMars Trace Gas Orbiter Solar Orbiter · Solar Sentinels Ares V-Y · ExoMars Solar Probe Plus Lunnyj Poligon LOFT Tiangong 3 (2014-2016)
UnknownMetNet · European Lunar Explorer · Titan Mare Explorer · James Webb Space Telescope · Io Volcano Observer · Transiting Exoplanet Survey Satellite · LISA Pathfinder
Recently Launched Soyuz TMA-22 · Fobos-Grunt
For proposed but not yet planned spacecraft see Category:Proposed spacecraftCategories:- Spacecraft
- Mars spacecraft
- Unmanned spacecraft
- Mars exploration
- NASA probes
- Planetary rovers
- Mars Exploration Rover
- 2011 in spaceflight
- Astrobiology
- Six-wheeled robots
- 2011 robots
- Nuclear-powered robots
- 2011 in the United States








Wikimedia Foundation. 2010.