- ExoMars
-
ExoMars Operator ESA, NASA Major contractors Thales Alenia Space and Astrium Mission type Orbiter, lander and rover Orbital insertion date 2017 and 2019 Launch date 2016 and 2018 from Cape Canaveral, Florida, USA Launch vehicle Two Atlas V rockets.[1] Mission duration Few days for the static lander;[2] 6 months for the rover; several years for the orbiter Homepage ExoMars programme Mass TGO: 3,130 kg;[3] Lander: 600 kg;[4] ExoMars rover: 270 kg;[5] Power Solar power / Batteries ExoMars (Exobiology on Mars) is a European-led robotic mission to Mars currently under development by the European Space Agency (ESA) with collaboration by NASA. Since its inception it has gone through several phases of planning with various proposals for landers, orbiters, launch vehicles, and international cooperation planning, such as the 2009 Mars Exploration Joint Initiative (MEJI) with the United States. As of 2011, an ExoMars orbiter examining trace gases and a short-life static lander test is planned for 2016, and one rover — ExoMars rover — for 2018.
Originally conceived as a rover with a static ground station, ExoMars was planned to launch in 2011 aboard a Soyuz Fregat rocket.[6] Within the framework of the new Mars Joint Exploration Initiative signed by NASA and ESA in July 2009, the drastically delayed ExoMars mission was combined with other projects to a multi-spacecraft programme divided over two Atlas V-launches:[4] the ExoMars Trace Gas Orbiter (TGO) was merged into the project, piggybacking a static meteorological lander being slated for launch in 2016. The accompanying NASA MAX-C rover was cancelled in 2011 in favor of one joint ExoMars rover.[7]
Contents
Background and mission history
Since its beginnings in the early 2000s, ExoMars was subject to massive political and financial strife. Originally, the ExoMars concept consisted of one single, large robotic rover being part of ESA's Aurora programme as a Flagship mission and was approved by Europe's space ministers in December 2005. Initially planned to launch in 2011, Italy, a leading nation on the ExoMars mission, decided to limit its financial contribution, causing the first of three delays.
In 2007 Canadian-based technology firm MacDonald, Dettwiler and Associates Ltd. (MDA) was selected for a one-million-euro contract with EADS Astrium of Britain to design and build a prototype Mars rover chassis for the European Space Agency. Astrium was also contracted to design the final rover.[8]
In July 2009 NASA and ESA signed the Mars Joint Exploration Initiative, which significantly altered the technical and financial setting of the ExoMars mission. On June 19, when the rover was still planned to piggyback on the Mars Trace Gas Orbiter, it was reported that a prospective agreement would require that ExoMars lose enough weight to fit aboard the Atlas vehicle with NASA's orbiter.[9]
In August 2009 it was announced that the Russian Space Agency Roscosmos and ESA had signed a collaboration agreement that included cooperation on two Mars exploration projects: Russia's Phobos-Grunt project and ESA's ExoMars. Specifically, ESA secured a Russian Proton rocket as a backup launcher for the ExoMars rover, which should also include Russian-made parts.[10][11]
In October 2009 it was reported that under the agreed Mars Joint Exploration Initiative, the project would consist of two separate launches: a lander/orbiter mission in 2016 and a rover mission in 2018, each with a significant NASA role, including the use of two Atlas V rockets.[1][12] This initiative would apparently reconcile technological and science goals with available budgets.[12]
In December 17, 2009, the ESA governments gave their final approval to a two-part Mars exploration programme to be conducted with NASA, confirming their commitment to spend €850 million ($1.23 billion) on missions in 2016 and 2018. Another €150 million needed for operating the mission will be solicited during a meeting of ESA government ministers in late 2011 or early 2012. Unlike some ESA programmes, the ExoMars financing will not include a 20% margin for cost overruns, however.[13]
A group of scientists will be testing instruments being developed for the ExoMars missions in Morocco, chosen by reason of its arid and varied landscape.[14] One of the first tests scheduled for 2011 will be the Entry, Descent and Landing Demonstrator Module (EDM).[15]
In April 2011, because of a budgeting crisis, a proposal was announced to fly only one rover in 2018 that would be larger than either of the vehicles in the paired concept - ExoMars (ESA) and Max-C (NASA).[16] One suggestion is that the new vehicle would be built in Europe and take a mix of European and U.S. instruments. NASA would provide the rocket to get it into Mars and the 'Sky Crane' landing system. Despite the proposed reorganisation, the goals of the 2018 mission opportunity would stay broadly the same. These would be to look for signs of past or present life by drilling down into the soil, and packaging or caching rocks that can be picked up and despatched to Earth laboratories by a subsequent mission.[16] In April 2011 MAX-C was canceled.[7]
Mission objectives
The ExoMars mission's scientific objectives, in order of priority, are:[17]
- to search for possible biosignatures of Martian life, past or present.
- to characterise the water and geochemical distribution as a function of depth in the shallow subsurface.
- to study the surface environment and identify hazards to future manned missions to Mars.
- to investigate the planet's subsurface and deep interior to better understand the evolution and habitability of Mars.
- achieve incremental steps ultimately culminating in a sample return flight.
The technological objectives to develop are:
- landing of large payloads on Mars.
- to exploit solar electric power on the surface of Mars.
- to access the subsurface with a drill able to collect samples down to a depth of two metres (just below the degradating reach of UV light, oxidants and ionizing radiation.)[18]
- to develop surface exploration capability using a rover.
Mission architecture
According to current plans,[4][19][20] the ExoMars mission will comprise three spacecraft elements sent in two launches, both from Florida:
Contributing agency First launch in 2016 Second launch in 2018 
Launch vehicle: Atlas V 411 Launch vehicle: Atlas V 551 4 unspecified instruments for TGO Landing system: Sky-crane 
Trace Gas Orbiter 270 kg ExoMars rover 600 kg static meteorological lander Entry, descent and landing system (EDL) 2016 launch
ExoMars Trace Gas Orbiter
 The Mars Trace Gas Orbiter.
The Mars Trace Gas Orbiter.
The Trace Gas Orbiter (TGO), to be launched on January 2016,[18] will deliver the ExoMars EDM lander and then proceed to map the sources of methane on Mars and other gases, and in doing so, help select the landing site for the ExoMars rover to be launched on 2018. The presence of methane in Mars' atmosphere is intriguing because its likely origin is either present-day life or geological activity. Upon the arrival of the rover in 2018/2019, the orbiter would be transferred into a lower orbit where it would be able to perform analytical science activities as well as provide the EDM lander and ExoMars rover with telecommunication relay. The TGO would continue serving as a relay satellite for future landed missions until 2022.[21]
ExoMars EDM lander
The ExoMars 'Entry, Descent and Landing Demonstrator Module' (EDM) is a static lander originally planned to carry a group of eleven instruments collectively called the "Humboldt payload"[22] that would be dedicated to investigate the geophysics of the deep interior. But a payload confirmation review in the first quarter of 2009 resulted in a severe descope of the lander instruments, and the Humboldt suite was cancelled entirely.[23] The ESA-NASA collaboration (Mars Exploration Joint Initiative) concluded to launch all mission elements with two rockets, which generated new payload reviews, so it was decided to first demonstrate ESA's new descent and landing system technology on the EDM lander, so its payload and operation time will be very limited.[2]
The Entry, Descent and Landing Demonstrator Module (EDM) will provide Europe with the technology for landing on the surface of Mars with a controlled landing orientation and touchdown velocity. After entering the Martian atmosphere, the module will deploy a parachute and will complete its landing by using a closed-loop Guidance, Navigation and Control system based on a Radar Doppler Altimeter sensor and on-board Inertial Measurement Units. The latter will guide a liquid propulsion system which will produce a semi-soft touchdown on the surface of Mars by the actuation of clusters of thrusters to be operated in pulsed on-off mode.[24]
The EDM will be landing during the dust storm season, this will provide a unique chance to characterise a dust-loaded atmosphere during entry and descent, and to conduct surface measurements associated with a dust-rich environment.[25] Once on the surface, it will measure the wind speed and direction, humidity, pressure and surface temperature, and determine the transparency of the atmosphere.[25] It will also make the first measurements of electrical fields at the planet's surface. A color camera system is included in the payload. The EDM lander is expected to operate on the surface of Mars for a short time (about 8 sols) by using the excess energy capacity of its batteries.[24] Its proposed landing site is the Meridiani Planum because it is almost flat and without too many rocks, ideal for its airbag landing system.[2]
2018 launch
Plans call for the use of NASA's sky crane entry, descent and landing (EDL) system to deliver the rover on the surface of Mars.[18][7]
ExoMars rover
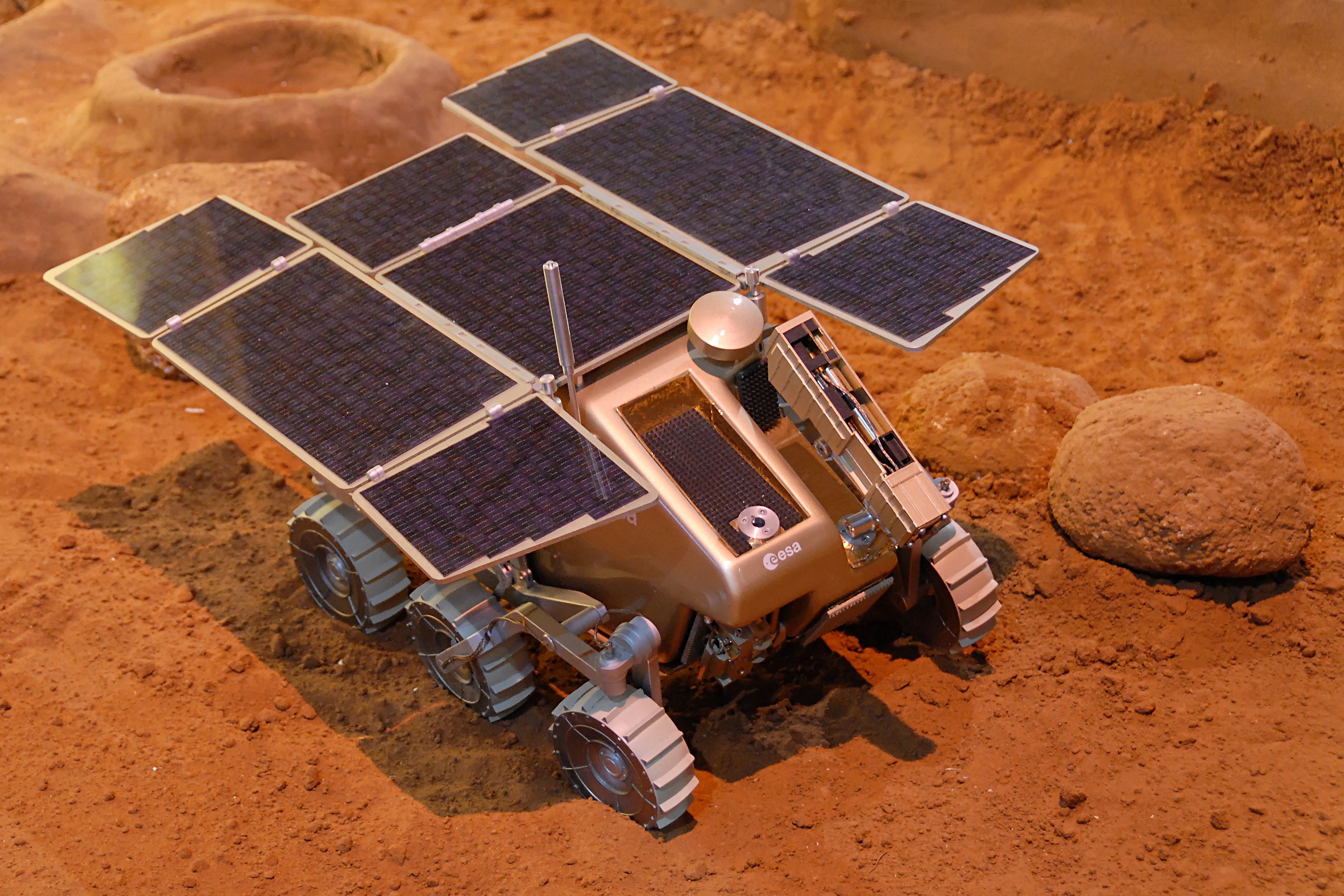
The ExoMars rover is a highly autonomous six-wheeled terrain vehicle and will weigh 295 kg, ca. 100 kg more than NASA's Mars Exploration Rovers Spirit and Opportunity.[5] Temporary plans considered a downsized version with a reduced weight of 207 kg.[26] Instrumentation will consist of the 10 kg 'Pasteur Payload' containing, among other instruments, a 2 meter sub-surface drill.[27]
The carrier module will deliver the descent module to Mars from a hyperbolic approach trajectory after which the Sky-crane landing system will ensure a soft landing with high accuracy. Once safely landed on the Martian surface the solar powered rover would begin a 218-sol mission. To counter the difficulty of remote control due to communication lag, ExoMars will have autonomous software for visual terrain navigation using compressed stereo images from mast mounted panoramic and infrared cameras and independent maintenance. For this purpose it creates digital maps from navigation stereo pair cameras and autonomously finds the adequate trajectory. Close-up collision avoidance cameras are used to ensure safety enabling the vehicle to navigate and safely travel approximately 100 meters per day. After the lander has been released and landed on the surface of Mars, the Mars Trace Gas Orbiter will operate as the rover's data-relay satellite.[19]
MAX-C rover (cancelled)
 Schematic depiction of the formerly proposed Mars Astrobiology Explorer-Cacher (MAX-C) Rover
Schematic depiction of the formerly proposed Mars Astrobiology Explorer-Cacher (MAX-C) RoverIt had been proposed that ESA ExoMars rover would be deployed together with a smaller NASA rover, the Mars Astrobiology Explorer-Cacher (MAX-C).[28][29][30][31] However, this was canceled in April 2011 in favor of a single larger joint ESA-NASA rover and for budget cuts.[7][32]
It was thought two rovers active at the same location could lead to synergies, such as bistatic radar surveys between the two rovers. The MAX-C rover would collect, analyze, and cache the most valuable samples in a manner suitable for return to Earth by a future mission. When the idea of the two rovers delivered to the same location on Mars was active, their science objectives and instruments was to be complementary in order to minimize duplication. Advantages of operating two rovers in the same area are: rover to rover imaging, cross analysis of similar geological targets, a low-frequency ground-penetrating radar on MAX-C and listen with ExoMars, and the MAX-C could receive and cache some of the most valuable subsurface samples collected by ExoMars for a later sample retrieval mission.[18]
Launch vehicle(s)
Under the agreed collaboration, NASA will provide two Atlas V rockets, as it was decided to divide the weight of the ExoMars system in two launches.[20][33][34]
ESA has already worked out a framework agreement with the Russian Space Agency that would allow it to cooperate on ExoMars, including provision of backup launch services and a payload contribution, along with mission support.[34] The backup launcher is the Proton rocket,[11] which is a four-stage rocket that was previously used to launch the Salyut 6, Salyut 7, Mir and some International Space Station components.
Landing system and proposed landing sites
If the collaboration with NASA takes place as proposed, it would be possible to implement NASA's new skycrane entry and descent system to be used on the Mars Science Laboratory rover.[35]
As of November 2007, the potential landing sites are:[36]
- Mawrth Vallis
- Nili Fossae
- Meridiani Planum
- Holden Crater
- Gale Crater
However, the 2009 discovery of methane sources on the planet makes them a high value target for exploration.[1] The presence of methane is intriguing because its likely origin is either present-day life or geological activity; confirmation of either would be a major discovery. Methane occurres in extended plumes, and the profiles imply that the methane was released from discrete regions. The profiles suggest that there may be two local source regions, the first centered near 30° N, 260° W and the second near 0°, 310° W.[37] To determine the optimal landing site and secure telecommunications, it was decided to include the Mars Trace Gas Mission orbiter in the 2016 launch in order to map beforehand what appears to be seasonal methane production.[38] The rover could then investigate the methane sources identified by the orbiter.
Instrumentation of the ExoMars rover
The present environment on Mars is exceedingly hostile for the widespread proliferation of surface life: it is too cold and dry and receives large doses of solar UV radiation as well as cosmic radiation. Notwithstanding these hazards, basic microorganisms may still flourish in protected places underground or within rock cracks and inclusions.[38] The science package in the ExoMars rover will hold a variety of instruments to study the environment for past or present habitability and possible biosignatures on Mars. The first instrument proposal (2004) is as follows:[39]
Imaging system
The Panoramic Camera System (PanCam) has been designed to perform digital terrain mapping for the rover and to search for morphological signatures of past biological activity preserved on the texture of surface rocks. The PanCam assembly includes two wide angle cameras for multi-spectral stereoscopic panoramic imaging, and a high resolution camera for high-resolution colour imaging.[40][41] The PanCam will also support the scientific measurements of other instruments by taking high-resolution images of locations that are difficult to access, such as craters or rock walls, and by supporting the selection of the best sites to carry out exobiology studies.
Drill
The ExoMars core drill is devised to acquire soil samples down to a maximum depth of 2 metres, in a variety of soil types. The drill will acquire a core sample (1 cm in diameter x 3 cm in length), extract it and deliver it to the inlet port of the Rover Payload Module, where the sample will be distributed, processed and analyzed. The ExoMars Drill embeds the Mars Multispectral Imager for Subsurface Studies (Ma-Miss) which is a miniaturised IR spectrometer devoted to the borehole exploration. The system will complete experiment cycles and at least 2 vertical surveys down to 2 metres (with four sample acquisitions each). This means that a minimum number of 17 samples shall be acquired and delivered by the drill for subsequent analysis.[42]
Analytical laboratory instruments
These instruments are placed internally and used to study collected samples:[43]
- Mars Organic Molecule Analyzer (MOMA) consists of a laser desorption ion source and a GC-MS spectrometry. The laser desorption ion source is capable to evaporate organic molecules even if they are not volatile, while the GC separates the highly volatile small molecules within the gas chromatograph. The final analysis of both instruments is done with an ion trap mass spectrometer.
- Infrared imaging spectrometer (MicrOmega-IR) is an infrared imaging spectrometer that can analyse the powder material derived from crushing samples collected by the drill. Its objective is to study mineral grain assemblages in detail to try to unravel their geological origin, structure, and composition. These data will be vital for interpreting past and present geological processes and environments on Mars. Because MicrOmega-IR is an imaging instrument, it can also be used to identify grains that are particularly interesting, and assigned them as targets for Raman and MOMA-LDMS observations.
- Mars X-Ray Diffractometer (Mars-XRD) - Powder diffraction of X-Rays will give exact composition of the crystalline minerals.[44][45] This instrument includes also an X-ray fluorescence capability that can provide useful atomic composition information.[46]
- Raman spectrometer (Raman) will provide geological and mineralogical context information complementary to that obtained by MicrOmega-IR. It is a very useful technique employed to identify mineral phases produced by water-related processes.[47][48][49]
- Ground-penetrating radar, called WISDOM (for Water Ice and Subsurface Deposit Information On Mars) will explore the subsurface of Mars to identify layering and help select interesting buried formations from which to collect samples for analysis.[50] It can transmit and receive signals using two, small Vivaldi-antennas mounted on the aft section of the rover. Electromagnetic waves penetrating into the ground are reflected at places where there is a sudden transition in the electrical parameters of the soil. By studying these reflections it is possible to construct a stratigraphic map of the subsurface and identify underground targets down to 2 to 3 m depth, comparable to the 2-m reach of the rover's drill. These data, combined with those produced by the PanCam and by the analyses carried out on previously collected samples, will be used to support drilling activities.[51]
- Mars Multispectral Imager for Subsurface Studies (Ma-MISS) is an infrared spectrometer located inside the drill. Ma-MISS will observe the lateral wall of the borehole created by the drill to study the subsurface startigraphy, to understand the distribution and state of water-related minerals, and to characterize the geophysical environment. The analyses of unexposed material by Ma-MISS, together with data obtained with the spectrometers located inside the rover, will be crucial for the unambiguous interpretation of the original conditions of Martian rock formation.[52]
The ExoMars Rover is designed to navigate autonomously across the surface. A pair of stereo cameras allow the rover to build up a 3D map of the terrain, which the navigation software then uses to assess terrain around it so that it avoids obstacles and find the most efficient route.[53]
See also
- Astrobiology
- Mars Astrobiology Explorer-Cacher - MAX-C rover (canceled April 2011)
- Mars Science Laboratory rover
- Mars Trace Gas Mission (aka ExoMars Trace Gas Orbiter)
- Life on Mars
- Mars Exploration Rover - Mission with two rovers
- Pathfinder - Mars rover
- Viking program
References
- ^ a b c Amos, Jonathan (12 October 2009). "Europe's Mars plans move forward". BBC News. http://news.bbc.co.uk/2/hi/science/nature/8302876.stm. Retrieved 2009-10-12.
- ^ a b c "The ExoMars Program - Implementing the EXM objectives by remaining compliant with budget" (PDF). ExoMars mission status. ESA. July 2009. pp. 23 pp.. http://mepag.jpl.nasa.gov/meeting/jul-09/04-Mepag_Coradini.pdf. Retrieved 2009-11-25.
- ^ Smith, Michael, ed (10 September 2009). "Mars Trace Gas Mission Science Rationale & Concept". Presentation to the NRC Decadal Survey Mars Panel. http://www.spacepolicyonline.com/pages/images/stories/PSDS%20Mars1%20Smith-TGM.pdf. Retrieved 2009-11-15.
- ^ a b c "ESA Proposes Two ExoMars Missions". Aviation Week. October 19, 2009. http://www.aviationweek.com/aw/generic/story_channel.jsp?channel=space&id=news/Exomars101909.xml&headline=ESA%20Proposes%20Two%20ExoMars%20Missions. Retrieved 2009-10-30.
- ^ a b "ExoMars Status". 20th MEPAG Meeting. European Space Agency. 3–4 March 2009. http://mepag.jpl.nasa.gov/meeting/mar-09/09_ExoMars_Status_MEPAG_09_Final.pdf. Retrieved 2009-11-15.
- ^ [http:/www.spacetoday.org/SolSys/Mars/MarsExploration/MarsEuroRover.html "Europe's ExoMars rover..."]. Space Today Online. August 28, 2005. http:/www.spacetoday.org/SolSys/Mars/MarsExploration/MarsEuroRover.html. Retrieved 2009-11-10.
- ^ a b c d "ESA Halts Work on ExoMars Orbiter and Rover". Space News. 20 April 2011. http://www.spacenews.com/civil/110420-esa-halts-work-exomars.html. Retrieved 2011-04-21.
- ^ "B.C. robotics firm lands Martian contract". CanWest News Service. http://www.canada.com/globaltv/national/story.html?id=67e4d15d-5ecc-4db8-9fe3-f5d904694950&k=48686.
- ^ NASA Could Take Role in European ExoMars Mission June 19, 2009
- ^ "Agreement between ESA and Roscosmos signed at "MAKS 2009"". WAPA (Avio News). 2009-08-20. http://www.avionews.com/index.php?corpo=see_news_home.php&news_id=1108379&pagina_chiamante=index.php. Retrieved 2009-09-08.
- ^ a b "ESA, Roscosmos Strike Mars Deal". Red Orbit. 20 August 2009. http://www.redorbit.com/news/space/1740298/esa_roscosmos_strike_mars_deal/. Retrieved 2009-09-08.
- ^ a b "ESA Proposes Two ExoMars Missions". Aviation Week. October 19, 2009. http://www.aviationweek.com/aw/generic/story_channel.jsp?channel=space&id=news/Exomars101909.xml&headline=ESA%20Proposes%20Two%20ExoMars%20Missions. Retrieved 2009-10-23.
- ^ http://www.space.com/news/091218-exomars-mission.html
- ^ Mullen, Leslie (2011-03-10). "Testing Mars Missions in Morocco". http://astrobiology.nasa.gov/articles/testing-mars-missions-in-morocco/. Retrieved 2011-03-12.
- ^ Mullen, Leslie (2011-03-11). "Testing Mars missions in Morocco". http://www.physorg.com/news/2011-03-mars-missions-morocco.html. Retrieved 2011-03-12.
- ^ a b "US and Europe mull single 2018 Mars rover". BBC News. 7 April 2011. http://www.bbc.co.uk/news/science-environment-13002214. Retrieved 2011-04-08.
- ^ "Scientific objectives - ExoMars". European Space Agency (ESA). November 1, 2007. http://www.esa.int/SPECIALS/ExoMars/SEM0VIAMS7F_0.html. Retrieved 2009-07-26.
- ^ a b c d "Mars Panel Meeting". Planetary Science Decadal Survey. Arizona State University, Tempe (USA): ESA. 10 September 2009. http://www.marspages.eu/media/archive4/exomars/statusbericht/StatusberichtSep2009.pdf. Retrieved 2009-11-24.
- ^ a b "Aurora Programme - ExoMars". European Space Agency. January 19, 2007. http://www.esa.int/SPECIALS/Aurora/SEM1NVZKQAD_0.html. Retrieved 2009-07-26.[dead link]
- ^ a b "Nasa and Esa sign Mars agreement". BBC News. 8 November 2009. http://news.bbc.co.uk/2/hi/science/nature/8348867.stm. Retrieved 2009-11-09.
- ^ "2016 ESA/NASA ExoMars Trace Gas Orbiter", MEPAG June 2011, Jet Propulsion Laboratory, June 16, 2011, http://mepag.jpl.nasa.gov/meeting/jun-11/13-EMTGO_MEPAG_June2011_presentation-rev2.pdf, retrieved 2011-06-29 (PDF)
- ^ "The ExoMars Instruments". ESA. 1 February 2008. http://www.esa.int/esaMI/ExoMars/SEMSZIAMS7F_0.html. Retrieved 2009-11-22.
- ^ Amos, Jonathan (15 June 2009). "Europe's Mars mission scaled back". BBC News. http://news.bbc.co.uk/2/hi/science/nature/8102086.stm. Retrieved 2009-11-22.
- ^ a b "The ESA-NASA ExoMars Programme". European Space Agency. 15 December2009. http://exploration.esa.int/science-e/www/object/index.cfm?fobjectid=46124. Retrieved 2009-12-22.
- ^ a b "Entry, Descent and Surface Science for 2016 Mars Mission". Science Daily. 10 June 2010. http://www.sciencedaily.com/releases/2011/06/110610131834.htm. Retrieved 2011-06-12.
- ^ "ExoMars Rover on Track for 2013 Launch". International Reporter. 2007-06-17. http://www.internationalreporter.com/News-2247/ExoMars-Rover-on-Track-for-2013-Launch.html. Retrieved 2009-04-08.
- ^ "Amase-ing Life On The Ice". Mars Daily. August 9, 2009. http://www.marsdaily.com/reports/Amaseing_Life_On_The_Ice_999.html. Retrieved 2009-09-08.
- ^ Pratt, Lisa; Dave Beaty, Joy Crisp (September 10, 2009). "Proposed 2018 Mars Astrobiology Explorer-Cacher (MAX-C) Mission". Presentation to NASA's Decadal. Jet Propulsion Laboratory. http://mepag.jpl.nasa.gov/decadal/MAX-C_DS_presentation_v15.pdf. Retrieved 2009-11-15.
- ^ "The ESA-NASA ExoMars programme 2016-2018 – an overview". ESA. 6 Jan 2011. http://exploration.esa.int/science-e/www/object/index.cfm?fobjectid=46048. Retrieved 2011-02-11.
- ^ Mars Exploration Program Analysis(July 9, 2009)
- ^ Mars Astrobiology Explorer-Cacher (MAX-C): A Potential Rover Mission for 2018 (September 15, 2009)
- ^ "U.S., Europe Plan Single-rover Mars Mission for 2018". Space News. 18 April, 2011. http://www.spacenews.com/civil/110418-single-rover-mars-mission-2018.html. Retrieved 2011-04-21.
- ^ "NASA and ESA Establish a Mars Exploration Joint Initiative". NASA. July 8, 2009. http://www.nasa.gov/mission_pages/mars/news/mars-20090708.html. Retrieved 2009-11-09.
- ^ a b "NASA, ESA Set Up Mars Exploration Framework". Aviation Week. July 10, 2009. http://www.aviationweek.com/aw/generic/story_channel.jsp?channel=space&id=news/Mars071009.xml. Retrieved 2009-11-09.
- ^ Amos, Jonathan (17 October 2008). "Europe delays its ExoMars mission". BBC News. http://news.bbc.co.uk/2/hi/science/nature/7677349.stm. Retrieved 2008-10-18.
- ^ BBC NEWS|Science/Nature|Europe eyes Mars landing sites
- ^ Mumma, Michael J.; et al. (20 February 2009). "Strong Release of Methane on Mars in Northern Summer 2003". Science 323 (5917): 1041–1045. Bibcode 2009Sci...323.1041M. doi:10.1126/science.1165243. PMID 19150811. http://images.spaceref.com/news/2009/Mumma_et_al_Methane_Mars_wSOM_accepted2.pdf.
- ^ a b Hand, Eric (March 3, 2009). "NASA pursues Mars methane orbiter". The Great Beyond (Nature). http://blogs.nature.com/news/thegreatbeyond/2009/03/nasa_pursues_mars_methane_orbi.html. Retrieved 2009-10-13.
- ^ Progress on the development of the ICAPS Dust Particle Facility (DPF)
- ^ PanCam - the Panoramic Camera
- ^ A. D. Griffiths, A. J. Coates, R. Jaumann, H. Michaelis, G. Paar, D. Barnes, J.-L. Josset (2006). "Context for the ESA ExoMars rover: the Panoramic Camera (PanCam) instrument". International Journal of Astrobiology 5 (3): 269–275. Bibcode 2004JRSp...35..429P. doi:10.1002/jrs.1198.
- ^ The ExoMars drill unit.
- ^ "The ExoMars instrument suite". European Space Agency. 15 Dec 2009. http://exploration.esa.int/science-e/www/object/index.cfm?fobjectid=45103. Retrieved 2009-12-19.
- ^ A. Wielders, R. Delhez (2005). "X-ray Powder Diffraction on the Red Planet". Int. Union of Crystallography Newsletter 30: 6–7.
- ^ R. Delhez, L. Marinangeli, S. van der Gaast (2005). "Mars-XRD: the X-ray Diffractometer for Rock and Soil Analysis on Mars in 2011". Int. Union of Crystallography Newsletter 30: 7–10.
- ^ Mars-XRD
- ^ ExoMars' Raman Spectrometer
- ^ J. Popp, M. Schmitt (2004). "Raman spectroscopy breaking terrestrial barriers!". J. Raman Spectrosc. 35: 429–432. Bibcode 2004JRSp...35..429P. doi:10.1002/jrs.1198.
- ^ F. Rull Pérez, J. Martinez-Frias (2006). "Raman spectroscopy goes to Mars". Spectroscopy Europe 18: 18–21. http://www.spectroscopyeurope.com/Raman_18_1.pdf.
- ^ Corbel C., Hamram S., Ney R., Plettemeier D., Dolon F., Jeangeot A., Ciarletti V., Berthelier J. (2006). "WISDOM: an UHF GPR on the Exomars Mission". Eos Trans. AGU 87 (52): P51D–1218. Bibcode 2006EOSTr..87...51G. doi:10.1029/2006EO050005.
- ^ WISDOM - the ground-penetrating radar
- ^ Ma-MISS - an IR spectrometer inside the drill
- ^ "The ExoMars Rover". European Space Agency. 4 April 2010. http://exploration.esa.int/science-e/www/object/index.cfm?fobjectid=45084. Retrieved 2010-04-09.
External links
- Official website
- ESA main web site
- Raman-LIBS spectrometer for ExoMars Combined Raman-LIBS spectrometer for ExoMars
- EADS Astrium ExoMars rover vehicle
Spacecraft missions to Mars Flybys 
Orbiters Mariner 9 · Mars 2 · 3 · 5 · Viking 1 · 2 · Phobos 2 · Mars Global Surveyor · 2001 Mars Odyssey · Mars Express · Mars Reconnaissance Orbiter · Fobos-Grunt · Yinghuo-1
Landers Rovers Planned missions Mars Science Laboratory (2011) · MetNet · MAVEN (2013) ·
ExoMars static lander and rover · ExoMars Trace Gas Orbiter (2016) · Northern LightUnplanned missions Related topics Exploration · Colonization · Failed Mars missions · Mars Scout Program
Bold italics indicate active missionsEuropean Space Agency Ariane 5 · Vega (2012)
FacilitiesCommunicationsProgrammesCosmic Vision · Aurora programme · European Geostationary Navigation Overlay Service · Future Launchers Preparatory Programme · Galileo positioning system · Global Monitoring for Environment and Security · Living Planet Programme · Technology Transfer Programme
PredecessorsRelatedArianespace · ESA Television · EUMETSAT · European Space Camp · GEWEX · Planetary Science Archive
Projects ScienceSolar PhysicsISEE-2 (1977-1987) · Ulysses (1990-2009) · SOHO (1995-present) · Cluster (2000-present) · Solar Orbiter (2017)Planetary ScienceGiotto (1985-1992) · Huygens (1997-2005) · SMART-1 (2003-2006) · Mars Express (2003-present) · Rosetta (2005-present) · Venus Express (2005-present) · BepiColombo (2014) · ExoMars Trace Gas Orbiter (2016) · ExoMars EDM (2016) · ExoMars Rover (2018) · Mars sample return mission (proposal/2020-2022) · Jupiter Icy Moon Explorer (proposal/2020) · MarcoPolo-R (proposal/2022)Astronomy
and CosmologyCos-B (1975-1982) · IUE (1978-1996) · EXOSAT (1983-1986) · Hipparcos (1989-1993) · Hubble (1990-present) · Eureca (1992-1993) · ISO (1995-1998) · XMM-Newton (1999-present) · INTEGRAL (2002-present) · COROT (2006-present) · Planck (2009-present) · Herschel (2009-present) · Gaia (2013) · JWST (2018) · Euclid (2019) · IXO (proposal/2020) · LISA (proposal/2020) · EChO (proposal/2022) · LOFT (proposal/2022) · Plato (proposal/2022) · STE-QUEST (proposal/2022)Earth ObservationMeteosat First Generation (1977-1997) · ERS-1 (1991-2000) · ERS-2 (1995-2011) · Meteosat Second Generation (2002-present) · Envisat (2002-present) · Double Star (2003-2007) · MetOp-A (2006-present) · GOCE (2009-present) · SMOS (2009-present) · CryoSat-2 (2010-present) · Swarm (2012) · Sentinel 1 (2013) · ADM-Aeolus (2013) · Sentinel 2 (2014) · EarthCARE (2016) · Sentinel 3 (2017) · Meteosat Third Generation (2017)Human
SpaceflightColumbus (2008-present) · Jules Verne (2008) · Cupola (2010-present) · Johannes Kepler (2011) · Edoardo Amaldi (2012) · European Robotic Arm (2012) · Albert Einstein (2013) · ATV-005 (2014)TelecommunicationsGEOS 2 (1978) · Olympus-1 (1989-1993) · Artemis (2001-present) · GIOVE-A (2005-present) · GIOVE-B (2008-present) · HYLAS (2010-present) · Galileo IOV (2011) · Galileo FOC (2012) · European Data Relay Satellite (2012)Technology
DemontratorsCancelledDarwin Mission · Eddington mission · Hermes · Columbus space station · Hopper
FailedFuture spaceflights Manned Shenzhou 9 · Shenzhou 10 · Soyuz TMA-03M · Soyuz TMA-05M · Soyuz TMA-06M · Soyuz TMA-07M · Soyuz TMA-08M · Soyuz TMA-09M · Soyuz TMA-10M · Soyuz TMA-11M
Unmanned 2011COTS Demo Flight 2 · Hypersonic Flight Experiment · HTV-3 · LARES · Mars Science Laboratory · Progress M-14M · RISAT-1 · Yinghuo-1
2012Aditya · Astrosat · BARREL · Cornell University Satellite · COTS Demo Flight 3/Dragon CRS-1 · Dragon CRS-2 · Dragon CRS-3 · Dragon CRS-4 · Cygnus 1 · Edoardo Amaldi ATV · European Robotic Arm · Nauka · Nuclear Spectroscopic Telescope Array · Progress M-15M · Progress M-16M · Progress M-17M · Progress M-18M · Progress M-19M · Progress M-20M · Radiation Belt Storm Probes
2013Chang'e 3 · Don Quijote (spacecraft) · Albert Einstein ATV · Dragon CRS-5 · GeoEye-2 · HTV-5 · MAVEN · Tiangong 2 ·
2014+BepiColombo · Chandrayaan-2 · Gravity and Extreme Magnetism SMEX · Hayabusa 2 · HTV-6 · Luna-Glob 2 · Luna-Grunt · HTV-7 · Luna-Glob 1 ExoMars Trace Gas Orbiter Solar Orbiter · Solar Sentinels Ares V-Y · ExoMars Solar Probe Plus Lunnyj Poligon LOFT Tiangong 3 (2014-2016)
UnknownMetNet · European Lunar Explorer · Titan Mare Explorer · James Webb Space Telescope · Io Volcano Observer · Transiting Exoplanet Survey Satellite · LISA Pathfinder
Recently Launched Soyuz TMA-22 · Fobos-Grunt
For proposed but not yet planned spacecraft see Category:Proposed spacecraftCategories:- Mars spacecraft
- European Space Agency probes
- Proposed spacecraft
- Astrobiology
- European Space Agency




Wikimedia Foundation. 2010.