- Mathematical optimization
-
For other uses, see Optimization (disambiguation).
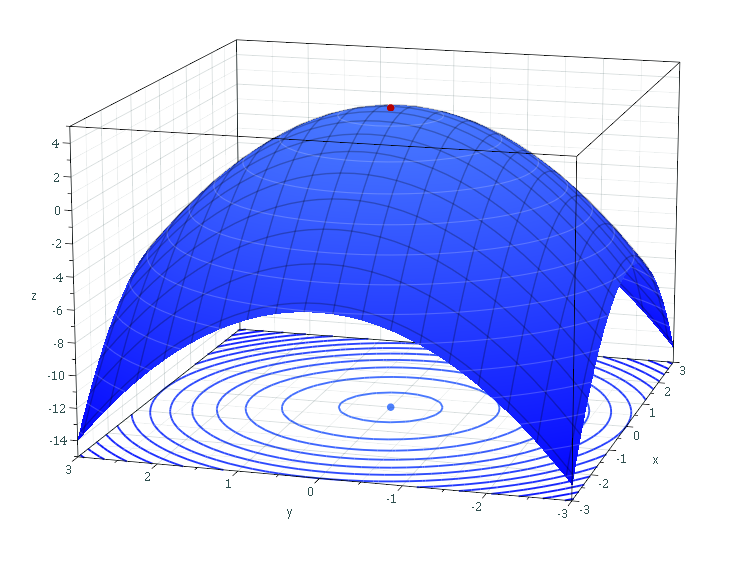
 The maximum of a paraboloid (red dot)
The maximum of a paraboloid (red dot)
In mathematics, computational science, or management science, mathematical optimization (alternatively, optimization or mathematical programming) refers to the selection of a best element from some set of available alternatives.[1]
In the simplest case, an optimization problem consists of maximizing or minimizing a real function by systematically choosing input values from within an allowed set and computing the value of the function. The generalization of optimization theory and techniques to other formulations comprises a large area of applied mathematics. More generally, optimization includes finding "best available" values of some objective function given a defined domain, including a variety of different types of objective functions and different types of domains.
Contents
Optimization problems
Main article: Optimization problemAn optimization problem can be represented in the following way
- Given: a function f : A
 R from some set A to the real numbers
R from some set A to the real numbers - Sought: an element x0 in A such that f(x0) ≤ f(x) for all x in A ("minimization") or such that f(x0) ≥ f(x) for all x in A ("maximization").
Such a formulation is called an optimization problem or a mathematical programming problem (a term not directly related to computer programming, but still in use for example in linear programming - see History below). Many real-world and theoretical problems may be modeled in this general framework. Problems formulated using this technique in the fields of physics and computer vision may refer to the technique as energy minimization, speaking of the value of the function f as representing the energy of the system being modeled.
Typically, A is some subset of the Euclidean space Rn, often specified by a set of constraints, equalities or inequalities that the members of A have to satisfy. The domain A of f is called the search space or the choice set, while the elements of A are called candidate solutions or feasible solutions.
The function f is called, variously, an objective function, cost function (minimization), utility function (maximization), or, in certain fields, energy function, or energy functional. A feasible solution that minimizes (or maximizes, if that is the goal) the objective function is called an optimal solution.
By convention, the standard form of an optimization problem is stated in terms of minimization. Generally, unless both the objective function and the feasible region are convex in a minimization problem, there may be several local minima, where a local minimum x* is defined as a point for which there exists some δ > 0 so that for all x such that
the expression
holds; that is to say, on some region around x* all of the function values are greater than or equal to the value at that point. Local maxima are defined similarly.
A large number of algorithms proposed for solving non-convex problems – including the majority of commercially available solvers – are not capable of making a distinction between local optimal solutions and rigorous optimal solutions, and will treat the former as actual solutions to the original problem. The branch of applied mathematics and numerical analysis that is concerned with the development of deterministic algorithms that are capable of guaranteeing convergence in finite time to the actual optimal solution of a non-convex problem is called global optimization.
Notation
Optimization problems are often expressed with special notation. Here are some examples.
Minimum and maximum value of a function
Consider the following notation:
This denotes the minimum value of the objective function x2 + 1, when choosing x from the set of real numbers
 . The minimum value in this case is 1, occurring at x = 0.
. The minimum value in this case is 1, occurring at x = 0.Similarly, the notation
asks for the maximum value of the objective function 2x, where x may be any real number. In this case, there is no such maximum as the objective function is unbounded, so the answer is "infinity" or "undefined".
Optimal input arguments
Main article: Arg maxConsider the following notation:
or equivalently
This represents the value (or values) of the argument x in the interval
![(-\infty,-1]](b/2bbda46f09c030f245f9afe1fa0eb85f.png) that minimizes (or minimize) the objective function x2 + 1 (the actual minimum value of that function is not what the problem asks for). In this case, the answer is x = -1, since x = 0 is infeasible, i.e. does not belong to the feasible set.
that minimizes (or minimize) the objective function x2 + 1 (the actual minimum value of that function is not what the problem asks for). In this case, the answer is x = -1, since x = 0 is infeasible, i.e. does not belong to the feasible set.Similarly,
or equivalently
represents the (x,y) pair (or pairs) that maximizes (or maximize) the value of the objective function xcos(y), with the added constraint that x lie in the interval [ − 5,5] (again, the actual maximum value of the expression does not matter). In this case, the solutions are the pairs of the form (5, 2kπ) and (−5,(2k+1)π), where k ranges over all integers.
Arg min and arg max are sometimes also written argmin and argmax, and stand for argument of the minimum and argument of the maximum.
History
Fermat and Lagrange found calculus-based formulas for identifying optima, while Newton and Gauss proposed iterative methods for moving towards an optimum. Historically, the first term for optimization was "linear programming", which was due to George B. Dantzig, although much of the theory had been introduced by Leonid Kantorovich in 1939. Dantzig published the Simplex algorithm in 1947, and John von Neumann developed the theory of duality in the same year.
The term programming in this context does not refer to computer programming. Rather, the term comes from the use of program by the United States military to refer to proposed training and logistics schedules, which were the problems Dantzig studied at that time.
Later important researchers in mathematical optimization include the following:
- Richard Bellman
- Ronald A. Howard
- Narendra Karmarkar
- William Karush
- Leonid Khachiyan
- Bernard Koopman
- Harold Kuhn
- Joseph Louis Lagrange
- László Lovász
- Arkadii Nemirovskii
- Yurii Nesterov
- Boris Polyak
- Lev Pontryagin
- James Renegar
- R. Tyrrell Rockafellar
- Cornelis Roos
- Naum Z. Shor
- Michael J. Todd
- Albert Tucker
Major subfields
- Convex programming studies the case when the objective function is convex (minimization) or concave (maximization) and the constraint set is convex. This can be viewed as a particular case of nonlinear programming or as generalization of linear or convex quadratic programming.
- Linear programming (LP), a type of convex programming, studies the case in which the objective function f is linear and the set of constraints is specified using only linear equalities and inequalities. Such a set is called a polyhedron or a polytope if it is bounded.
- Second order cone programming (SOCP) is a convex program, and includes certain types of quadratic programs.
- Semidefinite programming (SDP) is a subfield of convex optimization where the underlying variables are semidefinite matrices. It is generalization of linear and convex quadratic programming.
- Conic programming is a general form of convex programming. LP, SOCP and SDP can all be viewed as conic programs with the appropriate type of cone.
- Geometric programming is a technique whereby objective and inequality constraints expressed as posynomials and equality constraints as monomials can be transformed into a convex program.
- Integer programming studies linear programs in which some or all variables are constrained to take on integer values. This is not convex, and in general much more difficult than regular linear programming.
- Quadratic programming allows the objective function to have quadratic terms, while the feasible set must be specified with linear equalities and inequalities. For specific forms of the quadratic term, this is a type of convex programming.
- Fractional programming studies optimization of ratios of two nonlinear functions. The special class of concave fractional programs can be transformed to a convex optimization problem.
- Nonlinear programming studies the general case in which the objective function or the constraints or both contain nonlinear parts. This may or may not be a convex program. In general, whether the program is convex affects the difficulty of solving it.
- Stochastic programming studies the case in which some of the constraints or parameters depend on random variables.
- Robust programming is, like stochastic programming, an attempt to capture uncertainty in the data underlying the optimization problem. This is not done through the use of random variables, but instead, the problem is solved taking into account inaccuracies in the input data.
- Combinatorial optimization is concerned with problems where the set of feasible solutions is discrete or can be reduced to a discrete one.
- Infinite-dimensional optimization studies the case when the set of feasible solutions is a subset of an infinite-dimensional space, such as a space of functions.
- Metaheuristics make few or no assumptions about the problem being optimized and can search very large spaces of candidate solutions. However, metaheuristics do not guarantee an optimal solution is ever found.
- Constraint satisfaction studies the case in which the objective function f is constant (this is used in artificial intelligence, particularly in automated reasoning).
- Disjunctive programming is used where at least one constraint must be satisfied but not all. It is of particular use in scheduling.
In a number of subfields, the techniques are designed primarily for optimization in dynamic contexts (that is, decision making over time):
- Calculus of variations seeks to optimize an objective defined over many points in time, by considering how the objective function changes if there is a small change in the choice path.
- Optimal control theory is a generalization of the calculus of variations.
- Dynamic programming studies the case in which the optimization strategy is based on splitting the problem into smaller subproblems. The equation that describes the relationship between these subproblems is called the Bellman equation.
- Mathematical programming with equilibrium constraints is where the constraints include variational inequalities or complementarities.
Multi-objective optimization
Main article: Multiobjective optimizationAdding more than one objective to an optimization problem adds complexity. For example, to optimize a structural design, one would want a design that is both light and rigid. Because these two objectives conflict, a trade-off exists. There will be one lightest design, one stiffest design, and an infinite number of designs that are some compromise of weight and stiffness. The set of trade-off designs that cannot be improved upon according to one criterion without hurting another criterion is known as the Pareto set. The curve created plotting weight against stiffness of the best designs is known as the Pareto frontier.
A design is judged to be "Pareto optimal" (equivalently, "Pareto efficient" or in the Pareto set) if it is not dominated by any other design: If it is worse than another design in some respects and no better in any respect, then it is dominated and is not Pareto optimal.
Multi-modal optimization
Optimization problems are often multi-modal; that is they possess multiple good solutions. They could all be globally good (same cost function value) or there could be a mix of globally good and locally good solutions. Obtaining all (or at least some of) the multiple solutions is the goal of a multi-modal optimizer.
Classical optimization techniques due to their iterative approach do not perform satisfactorily when they are used to obtain multiple solutions, since it is not guaranteed that different solutions will be obtained even with different starting points in multiple runs of the algorithm. Evolutionary Algorithms are however a very popular approach to obtain multiple solutions in a multi-modal optimization task. See Evolutionary multi-modal optimization.
Classification of critical points and extrema
Feasibility problem
The satisfiability problem, also called the feasibility problem, is just the problem of finding any feasible solution at all without regard to objective value. This can be regarded as the special case of mathematical optimization where the objective value is the same for every solution, and thus any solution is optimal.
Many optimization algorithms need to start from a feasible point. One way to obtain such a point is to relax the feasibility conditions using a slack variable; with enough slack, any starting point is feasible. Then, minimize that slack variable until slack is null or negative.
Existence
The extreme value theorem of Karl Weierstrass states that a continuous real-valued function on a compact set attains its maximum and minimum value. More generally, a lower semi-continuous function on a compact set attains its minimum; an upper semi-continuous function on a compact set attains its maximum.
Necessary conditions for optimality
One of Fermat's theorems states that optima of unconstrained problems are found at stationary points, where the first derivative or the gradient of the objective function is zero (see first derivative test). More generally, they may be found at critical points, where the first derivative or gradient of the objective function is zero or is undefined, or on the boundary of the choice set. An equation (or set of equations) stating that the first derivative(s) equal(s) zero at an interior optimum is called a 'first-order condition' or a set of first-order conditions.
Optima of inequality-constrained problems are instead found by the Lagrange multiplier method. This method calculates a system of inequalities called the 'Karush–Kuhn–Tucker conditions' or 'complementary slackness conditions', which may then be used to calculate the optimum.
Sufficient conditions for optimality
While the first derivative test identifies points that might be optima, this test does not distinguish a point which is a minimum from one that is a maximum or one that is neither. When the objective function is twice differentiable, these cases can be distinguished by checking the second derivative or the matrix of second derivatives (called the Hessian matrix) in unconstrained problems, or the matrix of second derivatives of the objective function and the constraints called the bordered Hessian in constrained problems. The conditions that distinguish maxima, or minima, from other stationary points are called 'second-order conditions' (see 'Second derivative test'). If a candidate solution satisfies the first-order conditions, then satisfaction of the second-order conditions as well is sufficient to establish at least local optimality.
Sensitivity and continuity of optima
The envelope theorem describes how the value of an optimal solution changes when an underlying parameter changes. The process of computing this change is called comparative statics.
The maximum theorem of Claude Berge (1963) describes the continuity of an optimal solution as a function of underlying parameters.
Calculus of optimization
Main article: Karush–Kuhn–Tucker conditionsSee also: Critical point (mathematics), Differential calculus, Gradient, Hessian matrix, Positive definite matrix, Lipschitz continuity, Rademacher's theorem, Convex function, and Convex analysisFor unconstrained problems with twice-differentiable functions, some critical points can be found by finding the points where the gradient of the objective function is zero (that is, the stationary points). More generally, a zero subgradient certifies that a local minimum has been found for minimization problems with convex functions and other locally Lipschitz functions.
Further, critical points can be classified using the definiteness of the Hessian matrix: If the Hessian is positive definite at a critical point, then the point is a local minimum; if the Hessian matrix is negative definite, then the point is a local maximum; finally, if indefinite, then the point is some kind of saddle point.
Constrained problems can often be transformed into unconstrained problems with the help of Lagrange multipliers. Lagrangian relaxation can also provide approximate solutions to difficult constrained problems.
When the objective function is convex, then any local minimum will also be a global minimum. There exist efficient numerical techniques for minimizing convex functions, such as interior-point methods.
Computational optimization techniques
To solve problems, researchers may use algorithms that terminate in a finite number of steps, or iterative methods that converge to a solution (on some specified class of problems), or heuristics that may provide approximate solutions to some problems (although their iterates need not converge).
Optimization algorithms
- Simplex algorithm of George Dantzig, designed for linear programming.
- Extensions of the simplex algorithm, designed for quadratic programming and for linear-fractional programming.
- Variants of the simplex algorithm that are especially suited for network optimization.
- Combinatorial algorithms
Iterative methods
Main articles: Nonlinear programming and Iterative methodSee also: Newton's method, Quasi-Newton method, Finite difference, Approximation theory, and Numerical analysisThe iterative methods used to solve problems of nonlinear programming differ according to whether they evaluate Hessians, gradients, or only function values. While evaluating Hessians (H) and gradients (G) improves the rate of convergence, such evaluations increase the computational complexity (or computational cost) of each iteration. In some cases, the computational complexity may be excessively high.
One major criteria for optimizers is just the number of required function evaluations as this often is already a large computational effort, usually much more effort than within the optimizer itself, which mainly has to operate over the N variables. The derivatives provide detailed information for such optimizers, but are even harder to calculate, e.g. approximating the gradient takes at least N+1 function evaluations. For approximations of the 2nd derivatives (collected in the Hessian matrix) the number of function evaluations is in the order of N². Newton's method requires the 2nd order derivates, so for each iteration the number of function calls is in the order of N², but for a simpler pure gradient optimizer it is only N. However, gradient optimizers need usually more iterations than Newton's algorithm. Which one is best wrt. number of function calls depends on the problem itself.
- Methods that evaluate Hessians (or approximate Hessians, using finite differences):
- Newton's method
- Sequential quadratic programming: A method for small-medium scale constrained problems. Some versions can handle large-dimensional problems.
- Methods that evaluate gradients or approximate gradients using finite differences (or even subgradients):
- Quasi-Newton methods: Iterative methods for medium-large problems (e.g. N<1000).
- Conjugate gradient methods: Iterative methods for large problems. (In theory, these methods terminate in a finite number of steps with quadratic objective functions, but this finite termination is not observed in practice on finite–precision computers.)
- Interior point methods: This is a large class of methods for constrained optimization. Some interior-point methods use only (sub)gradient information, and others of which require the evaluation of Hessians.
- Gradient descent (alternatively, "steepest descent" or "steepest ascent"): A (slow) method of historical and theoretical interest, which has had renewed interest for finding approximate solutions of enormous problems.
- Subgradient methods - An iterative method for large locally Lipschitz functions using generalized gradients. Following Boris T. Polyak, subgradient–projection methods are similar to conjugate–gradient methods.
- Bundle method of descent: An iterative method for small–medium sized problems with locally Lipschitz functions, particularly for convex minimization problems. (Similar to conjugate gradient methods)
- Ellipsoid method: An iterative method for small problems with quasiconvex objective functions and of great theoretical interest, particularly in establishing the polynomial time complexity of some combinatorial optimization problems. It has similarities with Quasi-Newton methods.
- Reduced gradient method (Frank–Wolfe) for approximate minimization of specially structured problems with linear constraints, especially with traffic networks. For general unconstrained problems, this method reduces to the gradient method, which is regarded as obsolete (for almost all problems).
- Methods that evaluate only function values: If a problem is continuously differentiable, then gradients can be approximated using finite differences, in which case a gradient-based method can be used. Usually such non-gradient methods work only fine for problems with few parameter only.
- Interpolation methods
- Pattern search methods, which have better convergence properties than the Nelder–Mead simplicial heuristic (listed below, under heuristics).
Global convergence
More generally, if the objective function is not a quadratic function, then many optimization methods use other methods to ensure that some subsequence of iterations converges to an optimal solution. The first and still popular method for ensuring convergence relies on-line searches, which optimize a function along one dimension. A second and increasingly popular method for ensuring convergence uses trust regions. Both line searches and trust regions are used in modern methods of non-differentiable optimization. Usually a global optimizer is much slower than advanced local optimizers (such as BFGS), so often an efficient global optimizer can be constructed by starting the local optimizer from different starting points.
Heuristics
Main article: Heuristic algorithmBesides (finitely terminating) algorithms and (convergent) iterative methods, there are heuristics that can provide approximate solutions to some optimization problems:
- Memetic algorithm
- Differential evolution
- Dynamic relaxation
- Genetic algorithms
- Hill climbing
- Nelder-Mead simplicial heuristic: A popular heuristic for approximate minimization (without calling gradients)
- Particle swarm optimization
- Simulated annealing
- Tabu search
Applications
Mechanics and engineering
Problems in rigid body dynamics (in particular articulated rigid body dynamics) often require mathematical programming techniques, since you can view rigid body dynamics as attempting to solve an ordinary differential equation on a constraint manifold; the constraints are various nonlinear geometric constraints such as "these two points must always coincide", "this surface must not penetrate any other", or "this point must always lie somewhere on this curve". Also, the problem of computing contact forces can be done by solving a linear complementarity problem, which can also be viewed as a QP (quadratic programming) problem.
Many design problems can also be expressed as optimization programs. This application is called design optimization. One subset is the engineering optimization, and another recent and growing subset of this field is multidisciplinary design optimization, which, while useful in many problems, has in particular been applied to aerospace engineering problems.
Economics
Economics is closely enough linked to optimization of agents that an influential definition relatedly describes economics qua science as the "study of human behavior as a relationship between ends and scarce means" with alternative uses.[2] Modern optimization theory includes traditional optimization theory but also overlaps with game theory and the study of economic equilibria. The Journal of Economic Literature codes classify mathematical programming, optimization techniques, and related topics under JEL:C61-C63.
In microeconomics, the utility maximization problem and its dual problem, the expenditure minimization problem, are economic optimization problems. Insofar as they behave consistently, consumers are assumed to maximize their utility, while firms are usually assumed to maximize their profit. Also, agents are often modeled as being risk-averse, thereby preferring to avoid risk. Asset prices are also modeled using optimization theory, though the underlying mathematics relies on optimizing stochastic processes rather than on static optimization. Trade theory also uses optimization to explain trade patterns between nations.
Since the 1970s, economists have modeled dynamic decisions over time using control theory. For example, microeconomists use dynamic search models to study labor-market behavior. A crucial distinction is between deterministic and stochastic models.[3] Macroeconomists build dynamic stochastic general equilibrium (DSGE) models that describe the dynamics of the whole economy as the result of the interdependent optimizing decisions of workers, consumers, investors, and governments.[4][5]
Operations research
Another field that uses optimization techniques extensively is operations research. Operations research also uses stochastic modeling and simulation to support improved decision-making. Increasingly, operations research uses stochastic programming to model dynamic decisions that adapt to events; such problems can be solved with large-scale optimization and stochastic optimization methods.
Solvers
Main article: List of optimization softwareSee also
- Curve fitting
- Arg max
- Brachistochrone
- Fuzzy logic
- Game theory
- Engineering optimization
- Goal programming
- Important publications in optimization
- Interval finite element
- Least squares
- Metaheuristic
- Mathematical Optimization Society (formerly Mathematical Programming Society)
- Mathematical optimization software
- Optimization algorithms
- Optimization problem
- Process optimization
- Radial basis function
- Random optimization
- Topkis's theorem
- Variational calculus
Notes
- ^ "The Nature of Mathematical Programming," Mathematical Programming Glossary, INFORMS Computing Society.
- ^ Lionel Robbins (1935, 2nd ed.) An Essay on the Nature and Significance of Economic Science, Macmillan, p. 16.
- ^ A.G. Malliaris (2008). "stochastic optimal control," The New Palgrave Dictionary of Economics, 2nd Edition. Abstract.
- ^ Julio Rotemberg and Michael Woodford (1997), "An Optimization-based Econometric Framework for the Evaluation of Monetary Policy.NBER Macroeconomics Annual, 12, pp. 297-346.
- ^ From The New Palgrave Dictionary of Economics (2008), 2nd Edition with Abstract links:
• "numerical optimization methods in economics" by Karl Schmedders
• "convex programming" by Lawrence E. Blume
• "Arrow–Debreu model of general equilibrium" by John Geanakoplos.
Further reading
Comprehensive
Undergraduate level
- Bradley, S.; Hax, A.; Magnanti, T. (1977). Applied mathematical programming. Addison Wesley.
- Rardin, Ronald L. (1997). Optimization in operations research. Prentice Hall. pp. 919. ISBN 0-02-398415-5.
- Strang, Gilbert (1986). Introduction to applied mathematics. Wellesley, MA: Wellesley-Cambridge Press (Strang's publishing company). pp. xii+758. ISBN 0-9614088-0-4. MR870634. http://www.wellesleycambridge.com/tocs/toc-appl.
Graduate level
- Magnanti, Thomas L. (1989). "Twenty years of mathematical programming". In Cornet, Bernard; Tulkens, Henry. Contributions to Operations Research and Economics: The twentieth anniversary of CORE (Papers from the symposium held in Louvain-la-Neuve, January 1987). Cambridge, MA: MIT Press. pp. 163–227. ISBN 0-262-03149-3. MR1104662.
- Minoux, M. (1986). Mathematical programming: Theory and algorithms (Translated by Steven Vajda from the (1983 Paris: Dunod) French ed.). Chichester: A Wiley-Interscience Publication. John Wiley & Sons, Ltd.. pp. xxviii+489. ISBN 0-471-90170-9. MR2571910. (2008 Second ed., in French: Programmation mathématique: Théorie et algorithmes. Editions Tec & Doc, Paris, 2008. xxx+711 pp. ISBN 978-2-7430-1000-3..
- Nemhauser, G. L.; Rinnooy Kan, A. H. G.; Todd, M. J., eds (1989). Optimization. Handbooks in Operations Research and Management Science. 1. Amsterdam: North-Holland Publishing Co.. pp. xiv+709. ISBN 0-444-87284-1. MR1105099.
- J. E. Dennis, Jr. and Robert B. Schnabel, A view of unconstrained optimization (pp. 1–72);
- Donald Goldfarb and Michael J. Todd, Linear programming (pp. 73–170);
- Philip E. Gill, Walter Murray, Michael A. Saunders, and Margaret H. Wright, Constrained nonlinear programming (pp. 171–210);
- Ravindra K. Ahuja, Thomas L. Magnanti, and James B. Orlin, Network flows (pp. 211–369);
- W. R. Pulleyblank, Polyhedral combinatorics (pp. 371–446);
- George L. Nemhauser and Laurence A. Wolsey, Integer programming (pp. 447–527);
- Claude Lemaréchal, Nondifferentiable optimization (pp. 529–572);
- Roger J-B Wets, Stochastic programming (pp. 573–629);
- A. H. G. Rinnooy Kan and G. T. Timmer, Global optimization (pp. 631–662);
- P. L. Yu, Multiple criteria decision making: five basic concepts (pp. 663–699).
- Shapiro, Jeremy F. (1979). Mathematical programming: Structures and algorithms. New York: Wiley-Interscience [John Wiley & Sons]. pp. xvi+388. ISBN 0-471-77886-9. MR544669.
Continuous optimization
- Mordecai Avriel (2003). Nonlinear Programming: Analysis and Methods. Dover Publishing. ISBN 0-486-43227-0.
- Bonnans, J. Frédéric; Gilbert, J. Charles; Lemaréchal, Claude; Sagastizábal, Claudia A. (2006). Numerical optimization: Theoretical and practical aspects. Universitext (Second revised ed. of translation of 1997 French ed.). Berlin: Springer-Verlag. pp. xiv+490. doi:10.1007/978-3-540-35447-5. ISBN 3-540-35445-X. MR2265882. http://www.springer.com/mathematics/applications/book/978-3-540-35445-1.
- Bonnans, J. Frédéric; Shapiro, Alexander (2000). Perturbation analysis of optimization problems. Springer Series in Operations Research. New York: Springer-Verlag. pp. xviii+601. ISBN 0-387-98705-3. MR1756264.
- Boyd, Stephen P.; Vandenberghe, Lieven (2004) (pdf). Convex Optimization. Cambridge University Press. ISBN 9780521833783. http://www.stanford.edu/~boyd/cvxbook/bv_cvxbook.pdf. Retrieved October 15, 2011.
- Jorge Nocedal and Stephen J. Wright (2006). Numerical Optimization. Springer. ISBN 0-387-30303-0. http://www.ece.northwestern.edu/~nocedal/book/num-opt.html.
Applications
- Dixit, Avinash (1990). Optimization in economic theory (2nd ed.). Oxford University Press. pp. 206. ISBN 0198772106.
Combinatorial optimization
- R. K. Ahuja, Thomas L. Magnanti, and James B. Orlin (1993). Network Flows: Theory, Algorithms, and Applications. Prentice-Hall, Inc. ISBN 0-13-617549-X.
- William J. Cook, William H. Cunningham, William R. Pulleyblank, Alexander Schrijver; Combinatorial Optimization; John Wiley & Sons; 1 edition (November 12, 1997); ISBN 0-471-55894-X.
- Gondran, Michel; Minoux, Michel (1984). Graphs and algorithms. Wiley-Interscience Series in Discrete Mathematics (Translated by Steven Vajda from the second (Collection de la Direction des Études et Recherches d'Électricité de France [Collection of the Department of Studies and Research of Électricité de France], v. 37. Paris: Éditions Eyrolles 1985. xxviii+545 pp. MR868083) French ed.). Chichester: John Wiley & Sons, Ltd.. pp. xix+650. ISBN 0-471-10374-8. MR2552933. (Fourth ed. Collection EDF R&D. Paris: Editions Tec & Doc 2009. xxxii+784 pp..
- Eugene Lawler (2001). Combinatorial Optimization: Networks and Matroids. Dover. ISBN 0486414531.
- Lawler, E. L.; Lenstra, J. K.; Rinnooy Kan, A. H. G.; Shmoys, D. B. (1985), The traveling salesman problem: A guided tour of combinatorial optimization, John Wiley & Sons, ISBN 0-471-90413-9.
- Jon Lee; A First Course in Combinatorial Optimization; Cambridge University Press; 2004; ISBN 0-521-01012-8.
- Christos H. Papadimitriou and Kenneth Steiglitz Combinatorial Optimization : Algorithms and Complexity; Dover Pubns; (paperback, Unabridged edition, July 1998) ISBN 0-486-40258-4.
External links
- COIN-OR—Computational Infrastructure for Operations Research
- Decision Tree for Optimization Software Links to optimization source codes
- Global optimization
- Mathematical Programming Glossary
- Mathematical Programming Society
- NEOS Guide currently being replaced by the NEOS Wiki
- Optimization Online A repository for optimization e-prints
- Optimization Related Links
- Convex Optimization I EE364a: Course from Stanford University
- Convex Optimization – Boyd and Vandenberghe Book on Convex Optimization
- Simplemax Online Optimization Services Web applications to access nonlinear optimization services
Solvers:
- APOPT - large-scale nonlinear programming
- Free Optimization Software by Systems Optimization Laboratory, Stanford University
- MIDACO-Solver General purpose (MINLP) optimization software based on Ant colony optimization algorithms (Matlab, Excel, C/C++, Fortran)
- Moocho - a very flexible open-source NLP solver
- TANGO Project - Trustable Algorithms for Nonlinear General Optimization - Fortran
Libraries:
- NAG Libraries- optimization routines available for multiple programming languages (C, C++, Fortran, Python, Java, .NET, GPUs), packages (MATLAB, Maple, Excel) and for SMP and multicore
- ALGLIB Open-source optimization routines (unconstrained and bound-constrained optimization). C++, C#, Delphi, Visual Basic.
- IOptLib (Investigative Optimization Library) - a free, open-source library for optimization algorithms (ANSI C).
- OAT (Optimization Algorithm Toolkit) - a set of standard optimization algorithms and problems in Java.
- Java Parallel Optimization Package (JPOP) An open-source java package which allows the parallel evaluation of functions, gradients, and hessians.
- OOL (Open Optimization library)-optimization routines in C.
- FuncLib Open source non-linear optimization library in C# with support for non-linear constraints and automatic differentiation.
Optimization: Algorithms, methods, and heuristics Unconstrained nonlinear: Methods calling ... ... and gradients... and Hessians
Constrained nonlinear GeneralDifferentiableAugmented Lagrangian methods · Sequential quadratic programming · Successive linear programmingConvex minimization GeneralBasis-exchangeCombinatorial ParadigmsApproximation algorithm · Dynamic programming · Greedy algorithm · Integer programming (Branch & bound or cut)Graph algorithmsMetaheuristics Areas of mathematics Areas Arithmetic · Algebra (elementary – linear – multilinear – abstract) · Geometry (Discrete geometry – Algebraic geometry – Differential geometry) · Calculus/Analysis · Set theory · Logic · Category theory · Number theory · Combinatorics · Graph theory · Topology · Lie theory · Differential equations/Dynamical systems · Mathematical physics · Numerical analysis · Computation · Information theory · Probability · Statistics · Optimization · Control theory · Game theory
Divisions Systems engineering Fields Processes Concepts Languages Tools People Related fields Categories: - Given: a function f : A




![\underset{x\in(-\infty,-1]}{\operatorname{arg\,min}} \; x^2 + 1,](7/d87f0c0debdb31b0f634048327731c70.png)
![\underset{x}{\operatorname{arg\,min}} \; x^2 + 1, \; \text{subject to:} \; x\in(-\infty,-1].](d/bed20cadbe7612e1ad52fd0a3dab5173.png)
![\underset{x\in[-5,5], \; y\in\mathbb R}{\operatorname{arg\,max}} \; x\cos(y),](3/073cab0bbd77ec9324992a2f56467daa.png)
![\underset{x, \; y}{\operatorname{arg\,max}} \; x\cos(y), \; \text{subject to:} \; x\in[-5,5], \; y\in\mathbb R,](2/bd2788333c50744a2d1c9a6209b1a043.png)
Wikimedia Foundation. 2010.