- Convex set
-
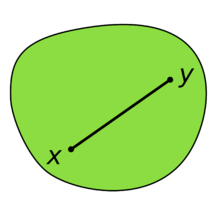 A convex set.
A convex set.
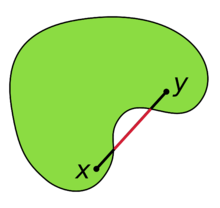 A non-convex set, with a line-segment outside the set.
A non-convex set, with a line-segment outside the set.In Euclidean space, an object is convex if for every pair of points within the object, every point on the straight line segment that joins them is also within the object. For example, a solid cube is convex, but anything that is hollow or has a dent in it, for example, a crescent shape, is not convex.
The notion can be generalized to other spaces as described below.
Contents
In vector spaces
Let S be a vector space over the real numbers, or, more generally, some ordered field. This includes Euclidean spaces. A set C in S is said to be convex if, for all x and y in C and all t in the interval [0,1], the point
- (1 − t ) x + t y
is in C. In other words, every point on the line segment connecting x and y is in C. This implies that a convex set in a real or complex topological vector space is path-connected, thus connected.
A set C is called absolutely convex if it is convex and balanced.
The convex subsets of R (the set of real numbers) are simply the intervals of R. Some examples of convex subsets of Euclidean 2-space are regular polygons and bodies of constant width. Some examples of convex subsets of Euclidean 3-space are the Archimedean solids and the Platonic solids. The Kepler-Poinsot polyhedra are examples of non-convex sets.
Properties
If S is a convex set, for any
 in S, and any nonnegative numbers
in S, and any nonnegative numbers  such that
such that  , then the vector
, then the vector  is in S. A vector of this type is known as a convex combination of .
is in S. A vector of this type is known as a convex combination of .Intersections and unions
The collection of convex subsets of a vector space has the following properties:[1][2]
- The empty set and the whole vector-space are convex.
- The intersection of any collection of convex sets is convex.
- The union of a non-decreasing sequence of convex subsets is a convex set.
For the preceding property of unions of non-decreasing sequences of convex sets, the restriction to nested sets was important: The union of two convex sets need not be convex.
Convex hulls
Every subset A of the vector space is contained within a smallest convex set (called the convex hull of A), namely the intersection of all convex sets containing A. The convex-hull operator Conv() has the characteristic properties of a hull operator:
-
extensive S ⊆ Conv(S), non-decreasing S ⊆ T implies that Conv(S) ⊆ Conv(T), and idempotent Conv(Conv(S)) = Conv(S).
The convex-hull operation is needed for the set of convex sets to form a lattice, in which the "join" operation is the convex hull of the union of two convex sets
- Conv(S)∨Conv(T) = Conv( S ∪ T ) = Conv( Conv(S) ∪ Conv(T) ).
The intersection of any collection of convex sets is itself convex, so the convex subsets of a (real or complex) vector space form a complete lattice.
Minkowski addition
Main article: Minkowski addition![Three squares are shown in the nonnegative quadrant of the Cartesian plane. The square Q1=[0,1]×[0,1] is green. The square Q2=[1,2]×[1,2] is brown, and it sits inside the turquoise square Q1+Q2=[1,3]×[1,3].](/pictures/enwiki/50/220px-Minkowski_sum.png) Minkowski addition of sets. The sum of the squares Q1=[0,1]2 and Q2=[1,2]2 is the square Q1+Q2=[1,3]2.
Minkowski addition of sets. The sum of the squares Q1=[0,1]2 and Q2=[1,2]2 is the square Q1+Q2=[1,3]2.- In a real vector-space, the Minkowski sum of two (non-empty) sets S1 and S2 is defined to be the set S1 + S2 formed by the addition of vectors element-wise from the summand-sets
- S1 + S2 = { x1 + x2 : x1 ∈ S1 and x2 ∈ S2 }.
More generally, the Minkowski sum of a finite family of (non-empty) sets Sn is the set formed by element-wise addition of vectors
- ∑ Sn = { ∑ xn : xn ∈ Sn }.
For Minkowski addition, the zero set {0} containing only the zero vector 0 has special importance: For every non-empty subset S of a vector space
- S + {0} = S;
in algebraic terminology, the zero vector 0 is the identity element of Minkowski addition (on the collection of non-empty sets).[3]
Convex hulls of Minkowski sums
Minkowski addition behaves well with respect to the operation of taking convex hulls, as shown by the following proposition:
- For all subsets S1 and S2 of a real vector-space, the convex hull of their Minkowski sum is the Minkowski sum of their convex hulls
- Conv( S1 + S2 ) = Conv( S1 ) + Conv( S2 ).
This result holds more generally for each finite collection of non-empty sets
- Conv( ∑ Sn ) = ∑ Conv( Sn ).
In mathematical terminology, the operations of Minkowski summation and of forming convex hulls are commuting operations.[4][5]
Closed convex sets
Closed convex sets can be characterised as the intersections of closed half-spaces (sets of point in space that lie on and to one side of a hyperplane). From what has just been said, it is clear that such intersections are convex, and they will also be closed sets. To prove the converse, i.e., every convex set may be represented as such intersection, one needs the supporting hyperplane theorem in the form that for a given closed convex set C and point P outside it, there is a closed half-space H that contains C and not P. The supporting hyperplane theorem is a special case of the Hahn–Banach theorem of functional analysis.
The Minkowski sum of two compact convex sets is closed, as is the sum of a compact convex set and a closed convex set.[6]
Generalizations and extensions for convexity
The notion of convexity in the Euclidean space may be generalized by modifying the definition in some or other aspects. The common name "generalized convexity" is used, because the resulting objects retain certain properties of convex sets.
Star-convex sets
Main article: Star domainLet C be a set in a real or complex vector space. C is star convex if there exists an x0 in C such that the line segment from x0 to any point y in C is contained in C. Hence a non-empty convex set is always star-convex but a star-convex set is not always convex.
Orthogonal convexity
Main article: Orthogonal convex hullAn example of generalized convexity is orthogonal convexity.[7]
A set S in the Euclidean space is called orthogonally convex or ortho-convex, if any segment parallel to any of the coordinate axes connecting two points of S lies totally within S. It is easy to prove that an intersection of any collection of orthoconvex sets is orthoconvex. Some other properties of convex sets are valid as well.
Not Euclidean geometry
The definition of a convex set and a convex hull extends naturally to geometries which are not Euclidean by defining a geodesically convex set to be one that contains the geodesics joining any two points in the set.
Order topology
Convexity can be extended for a space X endowed with the order topology, using the total order < of the space.[8]
Let
 . The subspace Y is a convex set if for each pair of points
. The subspace Y is a convex set if for each pair of points  such that a < b, the interval
such that a < b, the interval  is contained in Y. That is, Y is convex if and only if
is contained in Y. That is, Y is convex if and only if  .
.Convexity spaces
The notion of convexity may be generalised to other objects, if certain properties of convexity are selected as axioms.
Given a set X, a convexity over X is a collection
 of subsets of X satisfying the following axioms:[1][2]
of subsets of X satisfying the following axioms:[1][2]- The empty set and X are in
- The intersection of any collection from is in .
- The union of a chain (with respect to the inclusion relation) of elements of is in .
The elements of
are called convex sets and the pair (X, ) is called a convexity space. For the ordinary convexity, the first two axioms hold, and the third one is trivial.For an alternative definition of abstract convexity, more suited to discrete geometry, see the convex geometries associated with antimatroids.
See also
- Convex function
- Holomorphically convex hull
- Pseudoconvexity
- Convex metric space
- Concave set
- Helly's theorem
- Carathéodory's theorem (convex hull)
- Choquet theory
- Shapley–Folkman lemma
References
- ^ a b Soltan, Valeriu, Introduction to the Axiomatic Theory of Convexity, Ştiinţa, Chişinău, 1984 (in Russian).
- ^ a b Singer, Ivan (1997). Abstract convex analysis. Canadian Mathematical Society series of monographs and advanced texts. New York: John Wiley & Sons, Inc.. pp. xxii+491. ISBN 0-471-16015-6. MR1461544.
- ^ The empty set is important in Minkowski addition, because the empty set annihilates every other subset: For every subset S of a vector space, its sum with the empty set is empty
- S+∅ = ∅.
- ^ Theorem 3 (pages 562–563): Krein, M.; Šmulian, V. (1940). "On regularly convex sets in the space conjugate to a Banach space". Annals of Mathematics (2), Second series 41: pp. 556–583. doi:10.2307/1968735. JSTOR 1968735.
- ^ For the commutativity of Minkowski addition and convexification, see Theorem 1.1.2 (pages 2–3) in Schneider; this reference discusses much of the literature on the convex hulls of Minkowski sumsets in its "Chapter 3 Minkowski addition" (pages 126–196): Schneider, Rolf (1993). Convex bodies: The Brunn–Minkowski theory. Encyclopedia of mathematics and its applications. 44. Cambridge: Cambridge University Press. pp. xiv+490. ISBN 0-521-35220-7. MR1216521.
- ^ R. T. Rockafellar, Convex analysis, Princeton University Press, Princeton, NJ, 1970. Reprint: 1997.
- ^ Rawlins G.J.E. and Wood D, "Ortho-convexity and its generalizations", in: Computational Morphology, 137-152. Elsevier, 1988.
- ^ Munkres, James; Topology, Prentice Hall; 2nd edition (December 28, 1999). ISBN 0-13-181629-2.
External links
- Lectures on Convex Sets, notes by Niels Lauritzen, at Aarhus University, March 2010.



![Three squares are shown in the nonnegative quadrant of the Cartesian plane. The square Q1=[0,1]×[0,1] is green. The square Q2=[1,2]×[1,2] is brown, and it sits inside the turquoise square Q1+Q2=[1,3]×[1,3].](/pictures/enwiki/77/Minkowski_sum.png)
Wikimedia Foundation. 2010.