- Orbit
-
This article is about orbits in celestial mechanics, due to gravity. For other uses, see Orbit (disambiguation).
 A satellite orbiting the Earth has a tangential velocity and an inward acceleration.
A satellite orbiting the Earth has a tangential velocity and an inward acceleration.
 Two bodies of different mass orbiting a common barycenter. The relative sizes and type of orbit are similar to the Pluto–Charon system.
Two bodies of different mass orbiting a common barycenter. The relative sizes and type of orbit are similar to the Pluto–Charon system.In physics, an orbit is the gravitationally curved path of an object around a point in space, for example the orbit of a planet around the center of a star system, such as the Solar System.[1][2] Orbits of planets are typically elliptical.
Current understanding of the mechanics of orbital motion is based on Albert Einstein's general theory of relativity, which accounts for gravity as due to curvature of space-time, with orbits following geodesics. For ease of calculation, relativity is commonly approximated by the force-based theory of universal gravitation based on Kepler's laws of planetary motion.[3]
Contents
History
Historically, the apparent motions of the planets were first understood geometrically (and without regard to gravity) in terms of epicycles, which are the sums of numerous circular motions.[4] Theories of this kind predicted paths of the planets moderately well, until Johannes Kepler was able to show that the motions of planets were in fact (at least approximately) elliptical motions.[5]
In the geocentric model of the solar system, the celestial spheres model was originally used to explain the apparent motion of the planets in the sky in terms of perfect spheres or rings, but after the planets' motions were more accurately measured, theoretical mechanisms such as deferent and epicycles were added. Although it was capable of accurately predicting the planets' position in the sky, more and more epicycles were required over time, and the model became more and more unwieldy.
The basis for the modern understanding of orbits was first formulated by Johannes Kepler whose results are summarised in his three laws of planetary motion. First, he found that the orbits of the planets in our solar system are elliptical, not circular (or epicyclic), as had previously been believed, and that the Sun is not located at the center of the orbits, but rather at one focus.[6] Second, he found that the orbital speed of each planet is not constant, as had previously been thought, but rather that the speed depends on the planet's distance from the Sun. Third, Kepler found a universal relationship between the orbital properties of all the planets orbiting the Sun. For the planets, the cubes of their distances from the Sun are proportional to the squares of their orbital periods. Jupiter and Venus, for example, are respectively about 5.2 and 0.723 AU distant from the Sun, their orbital periods respectively about 11.86 and 0.615 years. The proportionality is seen by the fact that the ratio for Jupiter, 5.23/11.862, is practically equal to that for Venus, 0.7233/0.6152, in accord with the relationship.
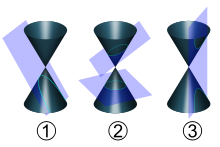 The lines traced out by orbits dominated by the gravity of a central source are conic sections: the shapes of the curves of intersection between a plane and a cone. Parabolic (1) and hyperbolic (3) orbits are escape orbits, whereas elliptical and circular orbits (2) are captive.
The lines traced out by orbits dominated by the gravity of a central source are conic sections: the shapes of the curves of intersection between a plane and a cone. Parabolic (1) and hyperbolic (3) orbits are escape orbits, whereas elliptical and circular orbits (2) are captive.Isaac Newton demonstrated that Kepler's laws were derivable from his theory of gravitation and that, in general, the orbits of bodies subject to gravity were conic sections, if the force of gravity propagated instantaneously. Newton showed that, for a pair of bodies, the orbits' sizes are in inverse proportion to their masses, and that the bodies revolve about their common center of mass. Where one body is much more massive than the other, it is a convenient approximation to take the center of mass as coinciding with the center of the more massive body.
Albert Einstein was able to show that gravity was due to curvature of space-time, and thus he was able to remove Newton's assumption that changes propagate instantaneously. In relativity theory, orbits follow geodesic trajectories which approximate very well to the Newtonian predictions. However there are differences that can be used to determine which theory describes reality more accurately. Essentially all experimental evidence that can distinguish between the theories agrees with relativity theory to within experimental measuremental accuracy, but the differences from Newtonian mechanics are usually very small (except where there are very strong gravity fields and very high speeds).
However, the Newtonian solution is still used for most purposes since it is significantly easier to use.
Planetary orbits
Within a planetary system, planets, dwarf planets, asteroids (a.k.a. minor planets), comets, and space debris orbit the barycenter in elliptical orbits. A comet in a parabolic or hyperbolic orbit about a barycenter is not gravitationally bound to the star and therefore is not considered part of the star's planetary system. Bodies which are gravitationally bound to one of the planets in a planetary system, either natural or artificial satellites, follow orbits about a barycenter near that planet.
Owing to mutual gravitational perturbations, the eccentricities of the planetary orbits vary over time. Mercury, the smallest planet in the Solar System, has the most eccentric orbit. At the present epoch, Mars has the next largest eccentricity while the smallest orbital eccentricities are seen in Venus and Neptune.
As two objects orbit each other, the periapsis is that point at which the two objects are closest to each other and the apoapsis is that point at which they are the farthest from each other. (More specific terms are used for specific bodies. For example, perigee and apogee are the lowest and highest parts of an orbit around Earth, while perihelion and aphelion are the closest and farthest points of an orbit around the Sun.)
In the elliptical orbit, the center of mass of the orbiting-orbited system is at one focus of both orbits, with nothing present at the other focus. As a planet approaches periapsis, the planet will increase in speed, or velocity. As a planet approaches apoapsis, its velocity will decrease.
Understanding orbits
There are a few common ways of understanding orbits:
- As the object moves sideways, it falls toward the central body. However, it moves so quickly that the central body will curve away beneath it.
- A force, such as gravity, pulls the object into a curved path as it attempts to fly off in a straight line.
- As the object moves sideways (tangentially), it falls toward the central body. However, it has enough tangential velocity to miss the orbited object, and will continue falling indefinitely. This understanding is particularly useful for mathematical analysis, because the object's motion can be described as the sum of the three one-dimensional coordinates oscillating around a gravitational center.
As an illustration of an orbit around a planet, the Newton's cannonball model may prove useful (see image below). This is a 'thought experiment', in which a cannon on top of a tall mountain is able to fire a cannonball horizontally at any chosen muzzle velocity. The effects of air friction on the cannonball are ignored (or perhaps the mountain is high enough that the cannon will be above the Earth's atmosphere, which comes to the same thing.)[7]
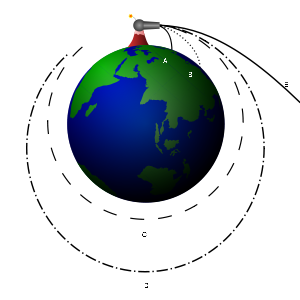 Newton's cannonball, an illustration of how objects can "fall" in a curve
Newton's cannonball, an illustration of how objects can "fall" in a curveIf the cannon fires its ball with a low initial velocity, the trajectory of the ball curves downward and hits the ground (A). As the firing velocity is increased, the cannonball hits the ground farther (B) away from the cannon, because while the ball is still falling towards the ground, the ground is increasingly curving away from it (see first point, above). All these motions are actually "orbits" in a technical sense — they are describing a portion of an elliptical path around the center of gravity — but the orbits are interrupted by striking the Earth.
If the cannonball is fired with sufficient velocity, the ground curves away from the ball at least as much as the ball falls — so the ball never strikes the ground. It is now in what could be called a non-interrupted, or circumnavigating, orbit. For any specific combination of height above the center of gravity and mass of the planet, there is one specific firing velocity (unaffected by the mass of the ball, which is assumed to be very small relative to the Earth's mass) that produces a circular orbit, as shown in (C).
As the firing velocity is increased beyond this, elliptic orbits are produced; one is shown in (D). If the initial firing is above the surface of the Earth as shown, there will also be elliptical orbits at slower velocities; these will come closest to the Earth at the point half an orbit beyond, and directly opposite, the firing point.
At a specific velocity called escape velocity, again dependent on the firing height and mass of the planet, an open orbit such as (E) results — a parabolic trajectory. At even faster velocities the object will follow a range of hyperbolic trajectories. In a practical sense, both of these trajectory types mean the object is "breaking free" of the planet's gravity, and "going off into space".
The velocity relationship of two moving objects with mass can thus be considered in four practical classes, with subtypes:
- No orbit
- Suborbital trajectories
- Range of interrupted elliptical paths
- Orbital trajectories (or simply "orbits")
- Range of elliptical paths with closest point opposite firing point
- Circular path
- Range of elliptical paths with closest point at firing point
- Open (or escape) trajectories
- Parabolic paths
- Hyperbolic paths
Newton's laws of motion
In many situations relativistic effects can be neglected, and Newton's laws give a highly accurate description of the motion. The acceleration of each body is equal to the sum of the gravitational forces on it, divided by its mass, and the gravitational force between each pair of bodies is proportional to the product of their masses and decreases inversely with the square of the distance between them. To this Newtonian approximation, for a system of two point masses or spherical bodies, only influenced by their mutual gravitation (the two-body problem), the orbits can be exactly calculated. If the heavier body is much more massive than the smaller, as for a satellite or small moon orbiting a planet or for the Earth orbiting the Sun, it is accurate and convenient to describe the motion in a coordinate system that is centered on the heavier body, and we say that the lighter body is in orbit around the heavier. For the case where the masses of two bodies are comparable, an exact Newtonian solution is still available, and qualitatively similar to the case of dissimilar masses, by centering the coordinate system on the center of mass of the two.
Energy is associated with gravitational fields. A stationary body far from another can do external work if it is pulled towards it, and therefore has gravitational potential energy. Since work is required to separate two bodies against the pull of gravity, their gravitational potential energy increases as they are separated, and decreases as they approach one another. For point masses the gravitational energy decreases without limit as they approach zero separation, and it is convenient and conventional to take the potential energy as zero when they are an infinite distance apart, and then negative (since it decreases from zero) for smaller finite distances.
With two bodies, an orbit is a conic section. The orbit can be open (so the object never returns) or closed (returning), depending on the total energy (kinetic + potential energy) of the system. In the case of an open orbit, the speed at any position of the orbit is at least the escape velocity for that position, in the case of a closed orbit, always less. Since the kinetic energy is never negative, if the common convention is adopted of taking the potential energy as zero at infinite separation, the bound orbits have negative total energy, parabolic trajectories have zero total energy, and hyperbolic orbits have positive total energy.
An open orbit has the shape of a hyperbola (when the velocity is greater than the escape velocity), or a parabola (when the velocity is exactly the escape velocity). The bodies approach each other for a while, curve around each other around the time of their closest approach, and then separate again forever. This may be the case with some comets if they come from outside the solar system.
A closed orbit has the shape of an ellipse. In the special case that the orbiting body is always the same distance from the center, it is also the shape of a circle. Otherwise, the point where the orbiting body is closest to Earth is the perigee, called periapsis (less properly, "perifocus" or "pericentron") when the orbit is around a body other than Earth. The point where the satellite is farthest from Earth is called apogee, apoapsis, or sometimes apifocus or apocentron. A line drawn from periapsis to apoapsis is the line-of-apsides. This is the major axis of the ellipse, the line through its longest part.
Orbiting bodies in closed orbits repeat their path after a constant period of time. This motion is described by the empirical laws of Kepler, which can be mathematically derived from Newton's laws. These can be formulated as follows:
- The orbit of a planet around the Sun is an ellipse, with the Sun in one of the focal points of the ellipse. The orbit lies in a plane, called the orbital plane. The point on the orbit closest to the attracting body is the periapsis. The point farthest from the attracting body is called the apoapsis. There are also specific terms for orbits around particular bodies; things orbiting the Sun have a perihelion and aphelion, things orbiting the Earth have a perigee and apogee, and things orbiting the Moon have a perilune and apolune (or periselene and aposelene respectively). An orbit around any star, not just the Sun, has a periastron and an apastron.
- As the planet moves around its orbit during a fixed amount of time, the line from the Sun to planet sweeps a constant area of the orbital plane, regardless of which part of its orbit the planet traces during that period of time. This means that the planet moves faster near its perihelion than near its aphelion, because at the smaller distance it needs to trace a greater arc to cover the same area. This law is usually stated as "equal areas in equal time."
- For a given orbit, the ratio of the cube of its semi-major axis to the square of its period is constant.
Note that that while bound orbits around a point mass or around a spherical body with an Newtonian gravitational field are closed ellipses, which repeat the same path exactly and indefinitely, any non-spherical or non-Newtonian effects (as caused, for example, by the slight oblateness of the Earth, or by relativistic effects, changing the gravitational field's behavior with distance) will cause the orbit's shape to depart from the closed ellipses characteristic of Newtonian two-body motion. The two-body solutions were published by Newton in Principia in 1687. In 1912 Karl Fritiof Sundman developed a converging infinite series that solves the three-body problem; however, it converges too slowly to be of much use. Except for special cases like the Lagrangian points, no method is known to solve the equations of motion for a system with four or more bodies.
Instead, orbits with many bodies can be approximated with arbitrarily high accuracy. These approximations take two forms:
- One form takes the pure elliptic motion as a basis, and adds perturbation terms to account for the gravitational influence of multiple bodies. This is convenient for calculating the positions of astronomical bodies. The equations of motion of the moons, planets and other bodies are known with great accuracy, and are used to generate tables for celestial navigation. Still, there are secular phenomena that have to be dealt with by post-Newtonian methods.
- The differential equation form is used for scientific or mission-planning purposes. According to Newton's laws, the sum of all the forces will equal the mass times its acceleration (F = ma). Therefore accelerations can be expressed in terms of positions. The perturbation terms are much easier to describe in this form. Predicting subsequent positions and velocities from initial values corresponds to solving an initial value problem. Numerical methods calculate the positions and velocities of the objects a short time in the future, then repeat the calculation. However, tiny arithmetic errors from the limited accuracy of a computer's math are cumulative, which limits the accuracy of this approach.
Differential simulations with large numbers of objects perform the calculations in a hierarchical pairwise fashion between centers of mass. Using this scheme, galaxies, star clusters and other large objects have been simulated.
Analysis of orbital motion
- (See also Kepler orbit, orbit equation and Kepler's first law.)
Note that the following is a classical (Newtonian) analysis of orbital mechanics, which assumes that the more subtle effects of general relativity, such as frame dragging and gravitational time dilation are negligible. Relativistic effects cease to be negligible when near very massive bodies (as with the precession of Mercury's orbit about the Sun), or when extreme precision is needed (as with calculations of the orbital elements and time signal references for GPS satellites.[8])
To analyze the motion of a body moving under the influence of a force which is always directed towards a fixed point, it is convenient to use polar coordinates with the origin coinciding with the center of force. In such coordinates the radial and transverse components of the acceleration are, respectively:
and
Since the force is entirely radial, and since acceleration is proportional to force, it follows that the transverse acceleration is zero. As a result,
After integrating, we have
which is actually the theoretical proof of Kepler's second law (A line joining a planet and the Sun sweeps out equal areas during equal intervals of time). The constant of integration, h, is the angular momentum per unit mass. It then follows that
where we have introduced the auxiliary variable
The radial force ƒ(r) per unit mass is the radial acceleration ar defined above. Solving the above differential equation with respect to time[9](See also Binet equation) yields:
In the case of gravity, Newton's law of universal gravitation states that the force is proportional to the inverse square of the distance:
where G is the constant of universal gravitation, m is the mass of the orbiting body (planet) - note that m is absent from the equation since it cancels out, and M is the mass of the central body (the Sun). Substituting into the prior equation, we have
So for the gravitational force — or, more generally, for any inverse square force law — the right hand side of the equation becomes a constant and the equation is seen to be the harmonic equation (up to a shift of origin of the dependent variable). The solution is:
where A and θ0 are arbitrary constants.
The equation of the orbit described by the particle is thus:
where e is:
In general, this can be recognized as the equation of a conic section in polar coordinates (r, θ). We can make a further connection with the classic description of conic section with:
If parameter e is smaller than one, e is the eccentricity and a the semi-major axis of an ellipse.
Orbital planes
Main article: Orbital plane (astronomy)The analysis so far has been two dimensional; it turns out that an unperturbed orbit is two-dimensional in a plane fixed in space, and thus the extension to three dimensions requires simply rotating the two-dimensional plane into the required angle relative to the poles of the planetary body involved.
The rotation to do this in three dimensions requires three numbers to uniquely determine; traditionally these are expressed as three angles.
Orbital period
Main article: Orbital periodThe orbital period is simply how long an orbiting body takes to complete one orbit.
Specifying orbits
Main article: Orbital elementsSix parameters are required to specify an orbit about a body. For example, the 3 numbers which describe the body's initial position, and the 3 values which describe its velocity will describe a unique orbit that can be calculated forwards (or backwards). However, traditionally the parameters used are slightly different.
The traditionally used set of orbital elements is called the set of Keplerian elements, after Johannes Kepler and his laws. The Keplerian elements are six:
- Inclination (i)
- Longitude of the ascending node (Ω)
- Argument of periapsis (ω)
- Eccentricity (e)
- Semimajor axis (a)
- Mean anomaly at epoch (M0)
In principle once the orbital elements are known for a body, its position can be calculated forward and backwards indefinitely in time. However, in practice, orbits are affected or perturbed, by other forces than simple gravity from an assumed point source (see the next section), and thus the orbital elements change over time.
Orbital perturbations
An orbital perturbation is when a force or impulse which is much smaller than the overall force or average impulse of the main gravitating body and which is external to the two orbiting bodies causes an acceleration, which changes the parameters of the orbit over time.
Radial, prograde and transverse perturbations
A small radial impulse given to a body in orbit changes the eccentricity, but not the orbital period (to first order). A prograde or retrograde impulse (i.e. an impulse applied along the orbital motion) changes both the eccentricity and the orbital period. Notably, a prograde impulse given at periapsis raises the altitude at apoapsis, and vice versa, and a retrograde impulse does the opposite. A transverse impulse (out of the orbital plane) causes rotation of the orbital plane without changing the period or eccentricity. In all instances, a closed orbit will still intersect the perturbation point.
Orbital decay
Main article: Orbital decayIf an orbit is about a planetary body with significant atmosphere, its orbit can decay because of drag. Particularly at each periapsis, the object experiences atmospheric drag, losing energy. Each time, the orbit grows less eccentric (more circular) because the object loses kinetic energy precisely when that energy is at its maximum. This is similar to the effect of slowing a pendulum at its lowest point; the highest point of the pendulum's swing becomes lower. With each successive slowing more of the orbit's path is affected by the atmosphere and the effect becomes more pronounced. Eventually, the effect becomes so great that the maximum kinetic energy is not enough to return the orbit above the limits of the atmospheric drag effect. When this happens the body will rapidly spiral down and intersect the central body.
The bounds of an atmosphere vary wildly. During a solar maximum, the Earth's atmosphere causes drag up to a hundred kilometres higher than during a solar minimum.
Some satellites with long conductive tethers can also experience orbital decay because of electromagnetic drag from the Earth's magnetic field. As the wire cuts the magnetic field it acts as a generator, moving electrons from one end to the other. The orbital energy is converted to heat in the wire.
Orbits can be artificially influenced through the use of rocket engines which change the kinetic energy of the body at some point in its path. This is the conversion of chemical or electrical energy to kinetic energy. In this way changes in the orbit shape or orientation can be facilitated.
Another method of artificially influencing an orbit is through the use of solar sails or magnetic sails. These forms of propulsion require no propellant or energy input other than that of the Sun, and so can be used indefinitely. See statite for one such proposed use.
Orbital decay can occur due to tidal forces for objects below the synchronous orbit for the body they're orbiting. The gravity of the orbiting object raises tidal bulges in the primary, and since below the synchronous orbit the orbiting object is moving faster than the body's surface the bulges lag a short angle behind it. The gravity of the bulges is slightly off of the primary-satellite axis and thus has a component along the satellite's motion. The near bulge slows the object more than the far bulge speeds it up, and as a result the orbit decays. Conversely, the gravity of the satellite on the bulges applies torque on the primary and speeds up its rotation. Artificial satellites are too small to have an appreciable tidal effect on the planets they orbit, but several moons in the solar system are undergoing orbital decay by this mechanism. Mars' innermost moon Phobos is a prime example, and is expected to either impact Mars' surface or break up into a ring within 50 million years.
Orbits can decay via the emission of gravitational waves. This mechanism is extremely weak for most stellar objects, only becoming significant in cases where there is a combination of extreme mass and extreme acceleration, such as with black holes or neutron stars that are orbiting each other closely.
Oblateness
The standard analysis of orbiting bodies assumes that all bodies consist of uniform spheres, or more generally, concentric shells each of uniform density. It can be shown that such bodies are gravitationally equivalent to point sources.
However, in the real world, many bodies rotate, and this introduces oblateness and distorts the gravity field, and gives a quadrupole moment to the gravitational field which is significant at distances comparable to the radius of the body.
The general effect of this is to change the orbital parameters over time; predominantly this gives a rotation of the orbital plane around the rotational pole of the central body (it perturbs the argument of perigee) in a way that is dependent on the angle of orbital plane to the equator as well as altitude at perigee. This is termed nodal regression.
Multiple gravitating bodies
Main article: n-body problemThe effects of other gravitating bodies can be significant. For example, the orbit of the Moon cannot be accurately described without allowing for the action of the Sun's gravity as well as the Earth's.
When there are more than two gravitating bodies it is referred to as an n-body problem. Most n-body problems have no closed form solution, although some special cases have been formulated.
Light radiation and stellar wind
For smaller bodies particularly, light and stellar wind can cause significant perturbations to the attitude and direction of motion of the body, and over time can be significant. Of the planetary bodies, the motion of asteroids is particularly affected over large periods when the asteroids are rotating relative to the Sun.
Astrodynamics
Main article: orbital mechanicsOrbital mechanics or astrodynamics is the application of ballistics and celestial mechanics to the practical problems concerning the motion of rockets and other spacecraft. The motion of these objects is usually calculated from Newton's laws of motion and Newton's law of universal gravitation. It is a core discipline within space mission design and control. Celestial mechanics treats more broadly the orbital dynamics of systems under the influence of gravity, including spacecraft and natural astronomical bodies such as star systems, planets, moons, and comets. Orbital mechanics focuses on spacecraft trajectories, including orbital maneuvers, orbit plane changes, and interplanetary transfers, and is used by mission planners to predict the results of propulsive maneuvers. General relativity is a more exact theory than Newton's laws for calculating orbits, and is sometimes necessary for greater accuracy or in high-gravity situations (such as orbits close to the Sun).
Earth orbits
Main article: Geocentric orbitScaling in gravity
The gravitational constant G has been calculated as:
- (6.6742 ± 0.001) × 10−11 (kg/m3)−1s−2.
Thus the constant has dimension density−1 time−2. This corresponds to the following properties.
Scaling of distances (including sizes of bodies, while keeping the densities the same) gives similar orbits without scaling the time: if for example distances are halved, masses are divided by 8, gravitational forces by 16 and gravitational accelerations by 2. Hence velocities are halved and orbital periods remain the same. Similarly, when an object is dropped from a tower, the time it takes to fall to the ground remains the same with a scale model of the tower on a scale model of the Earth.
Scaling of distances while keeping the masses the same (in the case of point masses, or by reducing the densities) gives similar orbits; if distances are multiplied by 4, gravitational forces and accelerations are divided by 16, velocities are halved and orbital periods are multiplied by 8.
When all densities are multiplied by 4, orbits are the same; gravitational forces are multiplied by 16 and accelerations by 4, velocities are doubled and orbital periods are halved.
When all densities are multiplied by 4, and all sizes are halved, orbits are similar; masses are divided by 2, gravitational forces are the same, gravitational accelerations are doubled. Hence velocities are the same and orbital periods are halved.
In all these cases of scaling. if densities are multiplied by 4, times are halved; if velocities are doubled, forces are multiplied by 16.
These properties are illustrated in the formula (derived from the formula for the orbital period)
for an elliptical orbit with semi-major axis a, of a small body around a spherical body with radius r and average density σ, where T is the orbital period. See also Kepler's Third Law.
Further reading
- Andrea Milani and Giovanni F. Gronchi. Theory of Orbit Determination (Cambridge University Press; 378 pages; 2010). Discusses new algorithms for determining the orbits of both natural and artificial celestial bodies.
See also
- List of orbits
- Escape velocity
- Gravity
- Kepler orbit
- Kepler's laws of planetary motion
- Molniya orbit
- Orbit (dynamics)
- Orbital spaceflight/Sub-orbital spaceflight
- Perifocal coordinate system
- Lagrangian point
- Rosetta (orbit)
- Klemperer rosette
- Trajectory, Hyperbolic trajectory, Parabolic trajectory and Radial trajectory
- Polar Orbits
- Secular variations of the planetary orbits
References
- ^ The Space Place :: What's a Barycenter
- ^ orbit (astronomy) – Britannica Online Encyclopedia
- ^ Kuhn, The Copernican Revolution, pp. 238, 246–252
- ^ Encyclopaedia Britannica, 1968, vol. 2, p. 645
- ^ M Caspar, Kepler (1959, Abelard-Schuman), at pp.131–140; A Koyré, The Astronomical Revolution: Copernicus, Kepler, Borelli (1973, Methuen), pp. 277–279
- ^ Jones, Andrew. "Kepler's Laws of Planetary Motion" (in en). about.com. http://physics.about.com/od/astronomy/p/keplerlaws.htm. Retrieved 2008-06-01.
- ^ See pages 6 to 8 in Newton's "Treatise of the System of the World" (written 1685, translated into English 1728, see Newton's 'Principia' – A preliminary version), for the original version of this 'cannonball' thought-experiment.
- ^ Pogge, Richard W.; “Real-World Relativity: The GPS Navigation System”. Retrieved 25 January 2008.
- ^ Fitzpatrick, Richard (2006-02-02). "Planetary orbits". Classical Mechanics – an introductory course. The University of Texas at Austin. Archived from the original on 2006-05-23. http://web.archive.bibalex.org/web/20060523200517/farside.ph.utexas.edu/teaching/301/lectures/node155.html. Retrieved 2009-01-14.
Further reading
- Abell, Morrison, and Wolff (1987). Exploration of the Universe (fifth ed.). Saunders College Publishing.
External links
- CalcTool: Orbital period of a planet calculator. Has wide choice of units. Requires JavaScript.
- Browser Based Three Dimension Simulation of Orbital Motion. Objects and distance are drawn to scale. Run on JavaScript-enabled browser such as Internet Explorer, Mozilla Firefox and Opera.
- Java simulation on orbital motion. Requires Java.
- NOAA page on Climate Forcing Data includes (calculated) data on Earth orbit variations over the last 50 million years and for the coming 20 million years
- On-line orbit plotter. Requires JavaScript.
- Orbital Mechanics (Rocket and Space Technology)
- Orbital simulations by Varadi, Ghil and Runnegar (2003) provide another, slightly different series for Earth orbit eccentricity, and also a series for orbital inclination. Orbits for the other planets were also calculated, by F. Varadi, B. Runnegar, M. Ghil (2003). "Successive Refinements in Long-Term Integrations of Planetary Orbits". The Astrophysical Journal 592: 620–630. Bibcode 2003ApJ...592..620V. doi:10.1086/375560., but only the eccentricity data for Earth and Mercury are available online.
- Understand orbits using direct manipulation. Requires JavaScript and Macromedia
- Linton, Christopher (2004). From Eudoxus to Einstein. Cambridge: University Press. ISBN 0521827507
- Swetz, Frank; et al. (1997). Learn from the Masters!. Mathematical Association of America. ISBN 0883857030
Categories:- Celestial mechanics
- Orbits
- Astrological aspects





























Wikimedia Foundation. 2010.