- Two-body problem
-
 Two bodies with similar mass orbiting around a common barycenter with elliptic orbits.
Two bodies with similar mass orbiting around a common barycenter with elliptic orbits.
In classical mechanics, the two-body problem is to determine the motion of two point particles that interact only with each other. Common examples include a satellite orbiting a planet, a planet orbiting a star, two stars orbiting each other (a binary star), and a classical electron orbiting an atomic nucleus (although to solve this system correctly a quantum mechanical approach must be used).
The two-body problem can be re-formulated as two independent one-body problems, a trivial one and one that involves solving for the motion of one particle in an external potential. Since many one-body problems can be solved exactly, the corresponding two-body problem can also be solved. By contrast, the three-body problem (and, more generally, the n-body problem for n ≥ 3) cannot be solved, except in special cases.
 Two bodies with a slight difference in mass orbiting around a common barycenter. The sizes, and this particular type of orbit are similar to the Pluto-Charon system and also to Earth-Moon system in which the center of mass is inside the bigger body instead.
Two bodies with a slight difference in mass orbiting around a common barycenter. The sizes, and this particular type of orbit are similar to the Pluto-Charon system and also to Earth-Moon system in which the center of mass is inside the bigger body instead.Contents
Reduction to two independent, one-body problems

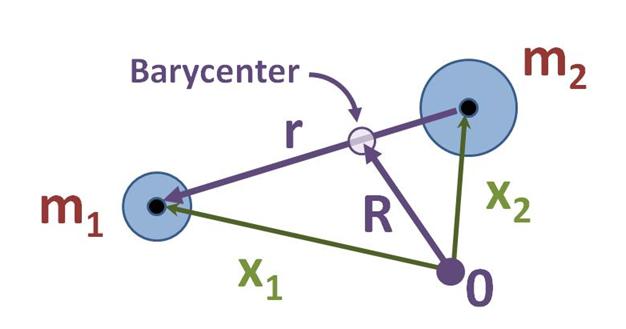
Let x1 and x2 be the positions of the two bodies, and m1 and m2 be their masses. The goal is to determine the trajectories x1(t) and x2(t) for all times t, given the initial positions x1(t = 0) and x2(t = 0) and the initial velocities v1(t = 0) and v2(t = 0).
When applied to the two masses, Newton's second law states that
where F12 is the force on mass 1 due to its interactions with mass 2, and F21 is the force on mass 2 due to its interactions with mass 1.
Adding and subtracting these two equations decouples them into two one-body problems, which can be solved independently. Adding equations (1) and (2) results in an equation describing the center of mass (barycenter) motion. By contrast, subtracting equation (2) from equation (1) results in an equation that describes how the vector r = x1 − x2 between the masses changes with time. The solutions of these independent one-body problems can be combined to obtain the solutions for the trajectories x1(t) and x2(t).
Center of mass motion (1st one-body problem)
Addition of the force equations (1) and (2) yields
where we have used Newton's third law F12 = −F21 and where
 is the position of the center of mass (barycenter) of the system.
is the position of the center of mass (barycenter) of the system.
The resulting equation:
shows that the velocity V = dR/dt of the center of mass is constant, from which follows that the total momentum m1 v1 + m2 v2 is also constant (conservation of momentum). Hence, the position R (t) of the center of mass can be determined at all times from the initial positions and velocities.
Displacement vector motion (2nd one-body problem)
Dividing both force equations by the respective masses, subtracting the second equation from the first and rearranging gives the equation
where we have again used Newton's third law F12 = −F21 and where r is the displacement vector from mass 2 to mass 1, as defined above.
The force between the two objects, which originates in the two objects, should only be a function of their separation r and not of their absolute positions x1 and x2; otherwise, there would not be translational symmetry, and the laws of physics would have to change from place to place. The subtracted equation can therefore be written:
where μ is the reduced mass
Solving the equation for r(t) is the key to the two-body problem; general solution methods are described below.
Once R (t) and r(t) have been determined, the original trajectories may be obtained
as may be verified by substituting the definitions of R and r into the right-hand sides of these two equations.
Two-body motion is planar
The motion of two bodies with respect to each other always lies in a plane (in the center of mass frame). Defining the linear momentum p and the angular momentum L by the equations
the rate of change of the angular momentum L equals the net torque N
and using the property of the vector cross product that v × w = 0 for any vectors v and w pointing in the same direction,
with F = μ d 2r / dt 2.
Introducing the assumption (true of most physical forces, as they obey Newton's strong third law of motion) that the force between two particles acts along the line between their positions, it follows that r × F = 0 and the angular momentum vector L is constant (conserved). Therefore, the displacement vector r and its velocity v are always in the plane perpendicular to the constant vector L.
Central forces
Main article: Classical central-force problemFor many physical problems, the force F(r) is a central force, i.e., it is of the form
where r = |r| and r̂ = r/r is the corresponding unit vector. We now have:
where F(r) is negative in the case of an attractive force.
Work
The total work done in a given time interval by the forces exerted by two bodies on each other is the same as the work done by one force applied to the total relative displacement.
See also
- Kepler orbit
- Energy drift
- Equation of the center
- Euler's three-body problem
- Gravitational two-body problem
- Kepler problem
- n-body problem
- Virial theorem
References
- ^ David Betounes (2001). Differential Equations. Springer. p. 58; Figure 2.15. ISBN 0387951407. http://books.google.com/?id=oNvFAzQXBhsC&pg=PA58.
Bibliography
- Landau LD, Lifshitz EM (1976). Mechanics (3rd. ed.). New York: Pergamon Press. ISBN 0-08-029141-4.
- Goldstein H (1980). Classical Mechanics (2nd. ed.). New York: Addison-Wesley. ISBN 0-201-02918-9.
External links
Categories:- Fundamental physics concepts
- Celestial mechanics
- Classical mechanics
 and
and  with
with  .
.














Wikimedia Foundation. 2010.