- Controller area network
-
Controller–area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other within a vehicle without a host computer.
CAN is a message-based protocol, designed specifically for automotive applications but now also used in other areas such as industrial automation and medical equipment.
Development of the CAN-bus started originally in 1983 at Robert Bosch GmbH.[1] The protocol was officially released in 1986 at the Society of Automotive Engineers (SAE) congress in Detroit, Michigan. The first CAN controller chips, produced by Intel and Philips, came on the market in 1987. Bosch published the CAN 2.0 specification in 1991.
CAN is one of five protocols used in the OBD-II vehicle diagnostics standard. The OBD-II standard has been mandatory for all cars and light trucks sold in the United States since 1996, and the EOBD standard has been mandatory for all petrol vehicles sold in the European Union since 2001 and all diesel vehicles since 2004.[2]
Contents
Applications
Automotive
A modern automobile may have as many as 70 electronic control units (ECU) for various subsystems.[3] Typically the biggest processor is the engine control unit (also engine control module/ECM or Powertrain Control Module/PCM in automobiles); others are used for transmission, airbags, antilock braking/ABS, cruise control, electric power steering/EPS, audio systems, windows, doors, mirror adjustment, battery and recharging systems for hybrid/electric cars, etc. Some of these form independent subsystems, but communications among others are essential. A subsystem may need to control actuators or receive feedback from sensors. The CAN standard was devised to fill this need.
The CAN bus may be used in vehicles to connect engine control unit and transmission, or (on a different bus) to connect the door locks, climate control, seat control, etc. Today the CAN bus is also used as a fieldbus in general automation environments, primarily due to the low cost of some CAN Controllers and processors.
Bosch holds patents on the technology, and manufacturers of CAN-compatible microprocessors pay license fees to Bosch, which are normally passed on to the customer in the price of the chip. Manufacturers of products with custom ASICs or FPGAs containing CAN-compatible modules may need to pay a fee for the CAN Protocol License.
Technology
CAN is a multi-master broadcast serial bus standard for connecting electronic control units (ECUs).
Each node is able to send and receive messages, but not simultaneously. A message consists primarily of an id (identifier), which represents the priority of the message, and up to eight data bytes. It is transmitted serially onto the bus. This signal pattern is encoded in non-return-to-zero (NRZ) and is sensed by all nodes.
The devices that are connected by a CAN network are typically sensors, actuators, and other control devices. These devices are not connected directly to the bus, but through a host processor and a CAN controller.
If the bus is free, any node may begin to transmit. If two or more nodes begin sending messages at the same time, the message with the more dominant id (which has more dominant bits, i.e., zeroes) will overwrite other nodes' less dominant id's, so that eventually (after this arbitration on the id.) only the dominant message remains and is received by all nodes. This mechanism is referred to as priority based bus arbitration. Messages with numerically smaller values of id. have higher priority and are transmitted first.
Each node requires a
- Host processor
- The host processor decides what received messages mean and which messages it wants to transmit itself.
- Sensors, actuators and control devices can be connected to the host processor.
- CAN controller (hardware with a synchronous clock).
- Receiving: the CAN controller stores received bits serially from the bus until an entire message is available, which can then be fetched by the host processor (usually after the CAN controller has triggered an interrupt).
- Sending: the host processor stores its transmit messages to a CAN controller, which transmits the bits serially onto the bus.
- Transceiver
- Receiving: it adapts signal levels from the bus to levels that the CAN controller expects and has protective circuitry that protects the CAN controller.
- Transmitting: it converts the transmit-bit signal received from the CAN controller into a signal that is sent onto the bus.
Bit rates up to 1 Mbit/s are possible at network lengths below 40 m. Decreasing the bit rate allows longer network distances (e.g., 500 m at 125 kbit/s).
The CAN data link layer protocol is standardized in ISO 11898-1 (2003). This standard describes mainly the data link layer (composed of the logical link control (LLC) sublayer and the media access control (MAC) sublayer) and some aspects of the physical layer of the OSI reference model. All the other protocol layers are the network designer's choice.
Data transmission
CAN features an automatic arbitration-free transmission. A CAN message that is transmitted with highest priority will succeed, and the node transmitting the lower priority message will sense this and back off and wait.
This is achieved by CAN transmitting data through a binary model of "dominant" bits and "recessive" bits where dominant is a logical 0 and recessive is a logical 1. This means open collector, or wired or physical implementation of the bus (but since dominant is 0 this is sometimes referred to as wired and). If one node transmits a dominant bit and another node transmits a recessive bit then the dominant bit "wins" (a logical AND between the two).
Truth tables for dominant/recessive, logical or, and logical and(for comparison) Bus state with two nodes transmitting Dominant Recessive Dominant Dominant Dominant Recessive Dominant Recessive Logical and 0 1 0 0 0 1 0 1 Logical or 1 0 1 1 1 0 1 0 So, if a recessive bit is being transmitted while a dominant bit is sent, the dominant bit is displayed, evidence of a collision. (All other collisions are invisible.) A dominant bit is asserted by creating a voltage across the wires while a recessive bit is simply not asserted on the bus. If any node sets a voltage difference, all nodes will see it. Thus there is no delay to the higher priority messages, and the node transmitting the lower priority message automatically attempts to re-transmit 6 bit clocks after the end of the dominant message.
When used with a differential bus, a carrier sense multiple access/bitwise arbitration (CSMA/BA) scheme is often implemented: if two or more devices start transmitting at the same time, there is a priority based arbitration scheme to decide which one will be granted permission to continue transmitting. The CAN solution to this is prioritized arbitration (and for the dominant message delay free), making CAN very suitable for real time prioritised communications systems.
During arbitration, each transmitting node monitors the bus state and compares the received bit with the transmitted bit. If a dominant bit is received when a recessive bit is transmitted then the node stops transmitting (i.e., it lost arbitration). Arbitration is performed during the transmission of the identifier field. Each node starting to transmit at the same time sends an id. with dominant as binary 0, starting from the high bit. As soon as their id. is a larger number (lower priority) they will be sending 1 (recessive) and see 0 (dominant), so they back off. At the end of id. transmission, all nodes but one have backed off, and the highest priority message gets through unimpeded.
For example, consider an 11-bit id. CAN network, with two nodes with id's of 15 (binary representation, 00000001111) and 16 (binary representation, 00000010000). If these two nodes transmit at the same time, each will transmit the first 6 zeros of their id. with no arbitration decision being made. When the 7th bit is transmitted, the node with the id. of 16 transmit a 1 (recessive) for its id., and the node with the id. of 15 transmits a 0 (dominant) for its id.. When this happens, the node with the id. of 16 will realize that it lost its arbitration, and allow the node with id. of 15 to continue its transmission. This ensures that the node with the lower bit value will always win the arbitration. The id. with the smaller number will win the right to use.
Id. allocation
Message id's must be unique on a single CAN bus, otherwise two nodes would continue transmission beyond the end of the arbitration field (id.) causing an error.
The choice of id's for messages is often done simply on the basis of identifying the type of data and the sending node; however, as the id. is also used as the message priority, this can lead to poor real-time performance. For example, if an urgent message with a short deadline has a numerically high id. (low priority) then its transmission can be delayed by other messages with lower numerical id's (higher priority), even though these messages may have much longer deadlines.
In the early 1990s, CAN messages in automotive systems were typically given id's based only on the type of data and sending node, and this led to the widely held but incorrect belief that a low CAN bus utilization of circa 30% was required to ensure that all messages would meet their deadlines. However, if id's are instead determined based on the deadline of the message, so the shorter the deadline, the lower the numerical id. and hence the higher the message priority, then bus utilizations of 70 to 80% can typically be achieved before any message deadlines are missed.
Bit timing
Each node in a CAN network has its own clock, and no clock is sent during data transmission. Synchronization is done by dividing each bit of the frame into a number of segments: Synchronization, Propagation, Phase 1 and Phase 2. The Length of each phase segment can be adjusted based on network and node conditions. The sample point falls between Phase Buffer Segment 1 and Phase Buffer Segment 2, which helps facilitate continuous synchronization. Continuous synchronization in turn enables the receiver to be able to properly read the messages.
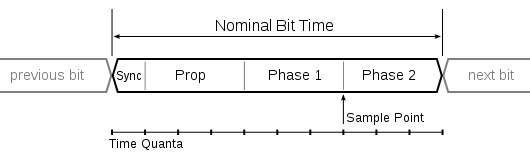 An example CAN Bit Timing with 10 time quanta per bit.
An example CAN Bit Timing with 10 time quanta per bit.Layers
Based on levels of abstraction, the structure of the CAN protocol can be described in terms of the following layers:
- Application Layer
- Object Layer
- Message Filtering
- Message and Status Handling
- Transfer Layer
- The Transfer Layer represents the kernel of the CAN protocol. It presents messages received to the object layer and accepts messages to be transmitted from the object layer. The transfer layer is responsible for bit timing and synchronization, message framing, arbitration, acknowledgement, error detection and signalling, and fault confinement. It performs:
- Fault Confinement
- Error Detection
- Message Validation
- Acknowledgement
- Arbitration
- Message Framing
- Transfer Rate and Timing
- Information Routing
- Physical Layer
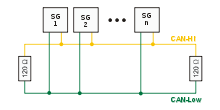 CAN-Bus electrical sample topology with terminator resistors
CAN-Bus electrical sample topology with terminator resistors
CAN bus in its original form was a link layer protocol specification that made reference to the physical layer only in abstract terms (i.e. as a medium that supported multiple access at the individual bit level by providing dominant and recessive states). In recent times the ISO11898-2 standard went some distance towards providing a candidate concrete class definition for the electrical part of the physical layer and is now widely adopted as a standard solution. The mechanical aspects of the physical layer however (connector type, pin-outs etc.) continue to lack formal treatment, as an automotive electronic control unit will typically have a single—often custom—connector that integrates the CAN bus lines, and it is from this background that we see the emergence of several de-facto standards for mechanical implementation with the 9 Way ‘D’ type CAN-(2), CAN+(7), OV (3), Supply(9) configuration as one of the most common.
[Tip for node designers here wishing to standardise on the de-facto mechanical interface:- Make sure each node is provided with 1 male and 1 female 9 Way D connector electrically wired in parallel. – Assume power is fed to the male and drawn from the female – Adoption of this strategy allows buses to be constructed using standard cable sets and avoids the use of the dreaded ‘hand built 2 cables into 1 D type’ scenario which over the years has made a significant contribution to bus unreliability, cable incompatibility and per network cost.]
The absence of a formal definition for the physical layer had the original advantage of freeing the scope of CAN bus from the constraints of any one particular physical implementation however its legacy has been to leave CAN bus implementations open to inter-operability issues in the physical domain.
The very high noise immunity on ISO11898-2 is achieved by ensuring that the differential impedance of the bus is maintained at a very low level using low value resistors (120 ohms) mounted at each end of the bus. The low impedance draws more current (and power) than other voltage based signalling specifications during the dominant state. On CAN bus systems, balanced line operation, where current in one signal line is exactly balanced by current in the opposite direction in the other signal leg becomes an essential facility to provide an independent stable 0 V reference for the receivers. Best practice determines that CAN bus balanced pair signals be carried in twisted pair form within a shielded cable and it is this precaution that helps to keep RF emissions to a minimum.
Whilst ISO11898-2 provides a small degree of immunity to common mode voltage between transmitter and receiver it is usual to implement networks with a high degree of voltage association between the transceivers of different nodes by having a 0 V rail running along the bus. Also, in the de-facto configuration, a supply rail is also included to distribute power to each of the participating CAN bus transceiver nodes. The design intention here is to provide a common supply for all the transceivers rather than as a convenient method of powering all the nodes.The actual voltage to be applied and which nodes apply it (if any) are application specific and not formally specified. Common ‘good practice’ node design might provide each node with transceivers which are optically isolated from their node host and derive a 5 V linearly regulated supply voltage for the transceivers from the universal supply rail provided by the bus. This configuration generally allows a sufficiently wide operating margin on the supply rail to provide interoperability across a broad spectrum of different node types. Typical values of supply voltage on such networks range between 7 and 30 Volts however lack of standardisation means that ultimately it is up to the individual system designer to check out all aspects of supply rail compatibility.
The standard (ISO11898-2) describes the electrical implementation formed from a multi-dropped single-ended balanced line configuration with resistor termination at each end of the bus. In this configuration a dominant state is asserted by 1 or more transmitters switching the CAN- to supply 0 V and (simultaneously) switching CAN+ to the +5 V bus voltage thereby forming a current path through the resistors that terminate the bus. As such the terminating resistors form an essential component of the signalling system and are included not just to limit wave reflection at high frequency. During a recessive state the signal lines and resistor(s) remain in a high impedances state with respect to both rails. Voltages on both CAN+ and CAN- tend (weakly) towards ½ rail voltage. During a dominant state the signal lines and resistor(s) move to a low impedance state with respect to the rails so that current flows through the resistor. CAN+ voltage tends to +5 V and CAN- tends to 0 V. A recessive state is only present on the bus when none of the transmitters on the bus is asserting a dominant state. Irrespective of signal state the signals lines are always in low impedance state with respect to one another by virtue of the terminating resistors at the end of the bus.
This signalling strategy differs significantly from other balanced line transmission technologies such as RS-422/3, RS-485, etc. which employ differential line drivers/ receivers and use a signalling system based on the differential mode voltage of the balanced line crossing a notional 0 V. Multiple access on such systems normally relies on the media supporting 3 states (active high, active low and inactive tri-state)and is dealt with in the time domain. Multiple access on CAN bus is achieved by the electrical logic of the system supporting just 2 states that are conceptually analagous to a ‘wired OR’ network.
Frames
A CAN network can be configured to work with two different message (or "frame") formats: the standard or base frame format (or CAN 2.0 A), and the extended frame format (or CAN 2.0 B). The only difference between the two formats is that the "CAN base frame" supports a length of 11 bits for the identifier, and the "CAN extended frame" supports a length of 29 bits for the identifier, made up of the 11-bit identifier ("base identifier") and an 18-bit extension ("identifier extension"). The distinction between CAN base frame format and CAN extended frame format is made by using the IDE bit, which is transmitted as dominant in case of an 11-bit frame, and transmitted as recessive in case of a 29-bit frame. CAN controllers that support extended frame format messages are also able to send and receive messages in CAN base frame format. All frames begin with a start-of-frame (SOF) bit that denotes the start of the frame transmission.
CAN has four frame types:
- Data frame: a frame containing node data for transmission
- Remote frame: a frame requesting the transmission of a specific identifier
- Error frame: a frame transmitted by any node detecting an error
- Overload frame: a frame to inject a delay between data and/or remote frame
Data frame
The data frame is the only frame for actual data transmission. There are two message formats:
- Base frame format: with 11 identifier bits
- Extended frame format: with 29 identifier bits
The CAN standard requires the implementation must accept the base frame format and may accept the extended frame format, but must tolerate the extended frame format.
Base frame format
The frame format is as follows:
Field name Length (bits) Purpose Start-of-frame 1 Denotes the start of frame transmission Identifier 11 A (unique) identifier for the data which also represent the message priority Remote transmission request (RTR) 1 Dominant (0) (see Remote Frame below) Identifier extension bit (IDE) 1 Must be dominant (0)Optional Reserved bit (r0) 1 Reserved bit (it must be set to dominant (0), but accepted as either dominant or recessive) Data length code (DLC)* 4 Number of bytes of data (0–8 bytes) Data field 0–8 bytes Data to be transmitted (length dictated by DLC field) CRC 15 Cyclic Redundancy Check CRC delimiter 1 Must be recessive (1) ACK slot 1 Transmitter sends recessive (1) and any receiver can assert a dominant (0) ACK delimiter 1 Must be recessive (1) End-of-frame (EOF) 7 Must be recessive (1) Extended frame format
The frame format is as follows:
Field name Length (bits) Purpose Start-of-frame 1 Denotes the start of frame transmission Identifier A 11 First part of the (unique) identifier for the data which also represents the message priority Substitute remote request (SRR) 1 Must be recessive (1)Optional Identifier extension bit (IDE) 1 Must be recessive (1)Optional Identifier B 18 Second part of the (unique) identifier for the data which also represents the message priority Remote transmission request (RTR) 1 Must be dominant (0) Reserved bits (r0, r1) 2 Reserved bits (it must be set dominant (0), but accepted as either dominant or recessive) Data length code (DLC)* 4 Number of bytes of data (0–8 bytes) Data field 0–8 bytes Data to be transmitted (length dictated by DLC field) CRC 15 Cyclic redundancy check CRC delimiter 1 Must be recessive (1) ACK slot 1 Transmitter sends recessive (1) and any receiver can assert a dominant (0) ACK delimiter 1 Must be recessive (1) End-of-frame (EOF) 7 Must be recessive (1) The two identifier fields (A & B) combine to form a 29-bit identifier.
* It is physically possible for a value between 9–15 to be transmitted in the 4-bit DLC, although the data is still limited to 8 bytes. Certain controllers allow the transmission and/or reception of a DLC greater than 8, but the actual data length is always limited to 8 bytes.
Remote frame
- Generally data transmission is performed on an autonomous basis with the data source node (e.g., a sensor) sending out a Data Frame. It is also possible, however, for a destination node to request the data from the source by sending a Remote Frame.
- There are 2 differences between a Data Frame and a Remote Frame. Firstly the RTR-bit is transmitted as a dominant bit in the Data Frame and secondly in the Remote Frame there is no Data Field.
i.e.,
- RTR = 0 ; DOMINANT in data frame
- RTR = 1 ; RECESSIVE in remote frame
In the very unlikely event of a Data Frame and a Remote Frame with the same identifier being transmitted at the same time, the Data Frame wins arbitration due to the dominant RTR bit following the identifier. In this way, the node that transmitted the Remote Frame receives the desired data immediately.
Error frame
Error frame consists of two different fields:
- The first field is given by the superposition of ERROR FLAGS (6–12 dominant/recessive bits) contributed from different stations.
- The following second field is the ERROR DELIMITER (8 recessive bits).
There are two types of error flags:
- Active Error Flag
- 6 dominant bits – Transmitted by a node detecting an error on the network that is in error state "error active".
- Passive Error Flag
- 6 recessive bits – Transmitted by a node detecting an active error frame on the network that is in error state "error passive".
Overload frame
The overload frame contains the two bit fields Overload Flag and Overload Delimiter. There are two kinds of overload conditions that can lead to the transmission of an overload flag:
- The internal conditions of a receiver, which requires a delay of the next data frame or remote frame.
- Detection of a dominant bit during intermission.
The start of an overload frame due to case 1 is only allowed to be started at the first bit time of an expected intermission, whereas overload frames due to case 2 start one bit after detecting the dominant bit. Overload Flag consists of six dominant bits. The overall form corresponds to that of the active error flag. The overload flag’s form destroys the fixed form of the intermission field. As a consequence, all other stations also detect an overload condition and on their part start transmission of an overload flag. Overload Delimiter consists of eight recessive bits. The overload delimiter is of the same form as the error delimiter.
Interframe spacing
Data frames and remote frames are separated from preceding frames by a bit field called interframe space. Overload frames and error frames are not preceded by an interframe space and multiple overload frames are not separated by an interframe space. Interframe space contains the bit fields intermission and bus idle and, for error passive stations, which have been transmitter of the previous message, suspend transmission. Interframe space consists of at least three consecutive recessive (1) bits.[4]
Bit stuffing
In CAN frames, a bit of opposite polarity is inserted after five consecutive bits of the same polarity. This practice is called bit stuffing, and is due to the non-return to zero (NRZ) coding adopted. The stuffed data frames are destuffed by the receiver. Since bit stuffing is used, six consecutive bits of the same type (111111 or 000000) are considered an error.
Bit stuffing implies that sent data frames could be larger than one would expect by simply enumerating the bits shown in the tables above.
Standards
There are several CAN physical layer standards:
- ISO 11898-1: CAN Data Link Layer and Physical Signalling
- ISO 11898-2: CAN High-Speed Medium Access Unit
- ISO 11898-3: CAN Low-Speed, Fault-Tolerant, Medium-Dependent Interface
- ISO 11898-4: CAN Time-Triggered Communication
- ISO 11898-5: CAN High-Speed Medium Access Unit with Low-Power Mode
- ISO 11898-6: CAN High-speed medium access unit with selective wake-up functionality
- ISO 11992-1: CAN fault-tolerant for truck/trailer communication
- ISO 11783-2: 250 kbit/s, Agricultural Standard
- SAE J1939-11: 250 kbit/s, Shielded Twisted Pair (STP)
- SAE J1939-15: 250 kbit/s, Unshielded Twisted Pair (UTP) (reduced layer)
- SAE J2411: Single-wire CAN (SWC)
ISO 11898-2 uses a two-wire balanced signalling scheme. It is the most used physical layer in car powertrain applications and industrial control networks.
ISO 11898-4 standard defines the time-triggered communication on CAN (TTCAN). It is based on the CAN data link layer protocol providing a system clock for the scheduling of messages.
SAE J1939 standard uses a two-wire twisted pair, −11 has a shield around the pair while −15 does not. SAE 1939 is widely used in heavy-duty (truck) and autobus industry as well as in agricultural & construction equipment.
ISO 11783-2 uses four unshielded twisted wires; two for CAN and two for terminating bias circuit (TBC) power and ground. This bus is used on agricultural tractors. This bus is intended to provide interconnectivity with any implementation adhering to the standard.
Higher layer implementations
As the CAN standard does not include tasks of application layer protocols, such as flow control, device addressing, and transportation of data blocks larger than one message, and above all, application data, many implementations of higher layer protocols were created. Among these are
- DeviceNet (used for industrial automation)
- CANopen (used for industrial automation)
- Smart Distributed System (SDS)
- CANaerospace (for the aviation industry)
- SAE J1939 (heavy road vehicles)
- ISO 15765-4
- ISO 11783 or ISOBUS (agriculture)
- SmartCraft
- NMEA 2000 (marine industry)
- CAN Kingdom
- SafetyBUS p (used for industrial automation)
- EnergyBus (used for electrical vehicles)
- MilCAN
- RV-C(used for recreational vehicles)
- ARINC 825 (for the aviation industry)
- For passenger cars, manufacturers have preferred to develop each their own standard. Examples:
- GMLAN (for General Motors)
- CCP / XCP
- ISO14229
Security
CAN is a low-level protocol, and does not support any security features intrinsically. Applications are expected to deploy their own security mechanisms; e.g., to authenticate each other. Failure to do so may result in various sorts of attacks, if the opponent manages to insert messages on the bus. Password mechanisms exist for data transfer that can modify the control unit software, like software download or ignition key codes, but usually not for standard communication.
Development tools
When developing and/or troubleshooting the CAN bus, examination of hardware signals can be very important. Logic analysers and bus analysers are tools which collect, analyse, decode, store signals so people can view the high-speed waveforms at their leisure. For CAN bus there as also specialist tools as well such CAN BUS Monitors
See also
- FlexCAN – An alternative implementation.
- Local Interconnect Network – A low cost alternative.
- FlexRay – A possible future direction
- Socketcan – a set of open source CAN drivers and a networking stack contributed by Volkswagen Research to the Linux kernel.
- OSEK
- List of network buses
References
- ^ "CAN History". CAN in Automation. http://www.can-cia.de/index.php?id=161.
- ^ Building Adapter for Vehicle On-board Diagnostic, obddiag.net, accessed 2009-09-09
- ^ Comparison of Event-Triggered and Time-Triggered Concepts with Regard to Distributed Control Systems A. Albert, Robert Bosch GmbH Embedded World, 2004, Nürnberg
- ^ "CAN BUS MESSAGE FRAMES – Overload Frame, Interframe Space". http://rs232-rs485.blogspot.com/2009/11/can-bus-message-frames-overload.html.
External links
- Bosch specification (old document — slightly ambiguous/unclear in some points, superseded by the standard ISO 11898)
- Controller Area Network (CAN) Schedulability Analysis: Refuted, Revisited and Revised
- Pinouts for common CAN-bus connectors
- Independent discussion platform CANLIST
- A webpage about CAN in automotive
- Controller Area Network (CAN) Schedulability Analysis with FIFO Queues
Automation protocols Process automation - BSAP
- CC-Link Industrial Networks
- CIP
- Controller area network
- ControlNet
- DeviceNet
- DF-1
- DirectNET
- EtherCAT
- Ethernet Global Data (EGD)
- Ethernet Powerlink
- EtherNet/IP
- FINS
- FOUNDATION fieldbus (H1, HSE)
- GE SRTP
- HART Protocol
- Honeywell SDS
- HostLink
- INTERBUS
- MECHATROLINK
- MelsecNet
- Modbus
- Optomux
- PieP
- Profibus
- PROFINET IO
- SERCOS interface
- SERCOS III
- Sinec H1
- SynqNet
- TTEthernet
Industrial control system Building automation Power system automation - IEC 60870-5
- DNP3
- IEC 60870-6
- IEC 61850
- IEC 62351
- Modbus
- Profibus
Automatic meter reading - ANSI C12.18
- IEC 61107
- DLMS/IEC 62056
- M-Bus
- Modbus
- ZigBee Smart Energy 2.0
Automobile / Vehicle Categories:- Computer networks
- Serial buses
- Automation
- Industrial computing
- Industrial automation
- Host processor


Wikimedia Foundation. 2010.