- Curvilinear coordinates
-
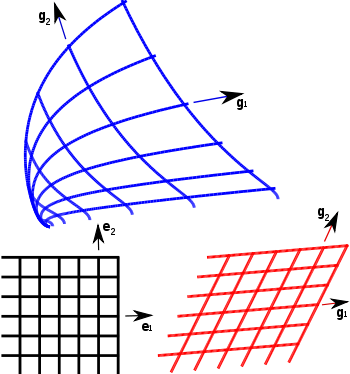 Curvilinear, affine, and Cartesian coordinates in two-dimensional space
Curvilinear, affine, and Cartesian coordinates in two-dimensional space
Curvilinear coordinates are a coordinate system for Euclidean space in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.
In two dimensional Cartesian coordinates, we can represent a point in space by the coordinates (x1,x2) and in vector form as
 where
where  are basis vectors. We can describe the same point in curvilinear coordinates in a similar manner, except that the coordinates are now (ξ1,ξ2) and the position vector is
are basis vectors. We can describe the same point in curvilinear coordinates in a similar manner, except that the coordinates are now (ξ1,ξ2) and the position vector is  . The quantities ξi and xi are related by the curvilinear transformation
. The quantities ξi and xi are related by the curvilinear transformation  . The basis vectors
. The basis vectors  and
and  are related by
are related byThe coordinate lines in a curvilinear coordinate systems are level curves of ξ1 and ξ2 in the two-dimensional plane.
An example of a curvilinear coordinate system in two-dimensions is the polar coordinate system. In that case the transformation is
Other well-known examples of curvilinear systems are cylindrical and spherical polar coordinates for R3. While a Cartesian coordinate surface is a plane, e.g., z = 0 defines the x-y plane, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere in R3—which obviously is curved.
Coordinates are often used to define the location or distribution of physical quantities which may be scalars, vectors, or tensors. Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry defined in R3 (e.g., motion in the field of a point mass/charge), is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Also boundary conditions may enforce symmetry. One would describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere.
Many of the concepts in vector calculus, which are given in Cartesian or spherical polar coordinates, can be formulated in arbitrary curvilinear coordinates. This gives a certain economy of thought, as it is possible to derive general expressions, valid for any curvilinear coordinate system, for concepts such as the gradient, divergence, curl, and the Laplacian.
Curvilinear Coordinates from a mathematical perspective
From a more general and abstract perspective, a curvilinear coordinate system is simply a coordinate patch on the differentiable manifold En (n-dimensional Euclidian space) that is diffeomorphic to the Cartesian coordinate patch on the manifold.[1] Note that two diffeomorphic coordinate patches on a differential manifold need not overlap differentiably. With this simple definition of a curvilinear coordinate system, all the results that follow below are simply applications of standard theorems in differential topology.
General curvilinear coordinates
 Fig. 1 - Coordinate surfaces, coordinate lines, and coordinate axes of general curvilinear coordinates.
Fig. 1 - Coordinate surfaces, coordinate lines, and coordinate axes of general curvilinear coordinates.In Cartesian coordinates, the position of a point P(x,y,z) is determined by the intersection of three mutually perpendicular planes, x = const, y = const, z = const. The coordinates x, y and z are related to three new quantities q1,q2, and q3 by the equations:
- x = x(q1,q2,q3) direct transformation
- y = y(q1,q2,q3) (curvilinear to Cartesian coordinates)
- z = z(q1,q2,q3)
The above equation system can be solved for the arguments q1, q2, and q3 with solutions in the form:
- q1 = q1(x, y, z) inverse transformation
- q2 = q2(x, y, z) (Cartesian to curvilinear coordinates)
- q3 = q3(x, y, z)
The transformation functions are such that there's a one-to-one relationship between points in the "old" and "new" coordinates, that is, those functions are bijections, and fulfil the following requirements within their domains:
- 1) They are smooth functions
- 2) The inverse Jacobian determinant

is not zero; that is, the transformation is invertible according to the inverse function theorem. The condition that the Jacobian determinant is not zero reflects the fact that three surfaces from different families intersect in one and only one point and thus determine the position of this point in a unique way.[2]
A given point may be described by specifying either x, y, z or q1, q2, q3 while each of the inverse equations describes a surface in the new coordinates and the intersection of three such surfaces locates the point in the three-dimensional space (Fig. 1). The surfaces q1 = const, q2 = const, q3 = const are called the coordinate surfaces; the space curves formed by their intersection in pairs are called the coordinate lines. The coordinate axes are determined by the tangents to the coordinate lines at the intersection of three surfaces. They are not in general fixed directions in space, as is true for simple Cartesian coordinates. The quantities (q1, q2, q3 ) are the curvilinear coordinates of a point P(q1, q2, q3 ).
In general, (q1, q2 ... qn ) are curvilinear coordinates in n-dimensional space.
Example: Spherical coordinates
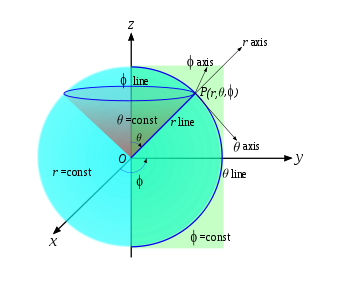 Fig. 2 - Coordinate surfaces, coordinate lines, and coordinate axes of spherical coordinates. Surfaces: r - spheres, θ - cones, φ - half-planes; Lines: r - straight beams, θ - vertical semicircles, φ - horizontal circles; Axes: r - straight beams, θ - tangents to vertical semicircles, φ - tangents to horizontal circles
Fig. 2 - Coordinate surfaces, coordinate lines, and coordinate axes of spherical coordinates. Surfaces: r - spheres, θ - cones, φ - half-planes; Lines: r - straight beams, θ - vertical semicircles, φ - horizontal circles; Axes: r - straight beams, θ - tangents to vertical semicircles, φ - tangents to horizontal circlesSpherical coordinates are one of the most used curvilinear coordinate systems in such fields as Earth sciences, cartography, and physics (quantum physics, relativity, etc.). The curvilinear coordinates (q1, q2, q3) in this system are, respectively, r (radial distance or polar radius, r ≥ 0), θ (zenith or latitude, 0 ≤ θ ≤ 180°), and φ (azimuth or longitude, 0 ≤ φ ≤ 360°). The direct relationship between Cartesian and spherical coordinates is given by:
Solving the above equation system for r, θ, and φ gives the inverse relations between spherical and Cartesian coordinates:
The respective spherical coordinate surfaces are derived in terms of Cartesian coordinates by fixing the spherical coordinates in the above inverse transformations to a constant value. Thus (Fig.2), r = const are concentric spherical surfaces centered at the origin, O, of the Cartesian coordinates, θ = const are circular conical surfaces with apex in O and axis the Oz axis, φ = const are half-planes bounded by the Oz axis and perpendicular to the xOy Cartesian coordinate plane. Each spherical coordinate line is formed at the pairwise intersection of the surfaces, corresponding to the other two coordinates: r lines (radial distance) are beams Or at the intersection of the cones θ = const and the half-planes φ = const; θ lines (meridians) are semicircles formed by the intersection of the spheres r = const and the half-planes φ = const ; and φ lines (parallels) are circles in planes parallel to xOy at the intersection of the spheres r = const and the cones θ = const. The location of a point P(r,θ,φ) is determined by the point of intersection of the three coordinate surfaces, or, alternatively, by the point of intersection of the three coordinate lines. The θ and φ axes in P(r,θ,φ) are the mutually perpendicular (orthogonal) tangents to the meridian and parallel of this point, while the r axis is directed along the radial distance and is orthogonal to both θ and φ axes.
The surfaces described by the inverse transformations are smooth functions within their defined domains. The Jacobian (functional determinant) of the inverse transformations is:
Curvilinear local basis
The concept of a basis
Main article: Basis (linear algebra)To define a vector in terms of coordinates, an additional coordinate-associated structure, called basis, is needed. A basis in three-dimensional space is a set of three linearly independent vectors
 , called basis vectors. Each basis vector is associated with a coordinate in the respective dimension. Any vector
, called basis vectors. Each basis vector is associated with a coordinate in the respective dimension. Any vector  can be represented as a sum of vectors
can be represented as a sum of vectors  formed by multiplication of a basis vector () by a scalar coefficient (vi), called component. Each vector, then, has exactly one component in each dimension and can be represented by the vector sum:
formed by multiplication of a basis vector () by a scalar coefficient (vi), called component. Each vector, then, has exactly one component in each dimension and can be represented by the vector sum:A requirement for the coordinate system and its basis is that if at least one
 then
thenThis condition is called linear independence. Linear independence implies that there cannot exist bases with basis vectors of zero magnitude because the latter will give zero-magnitude vectors when multiplied by any component. Non-coplanar vectors are linearly independent, and any triple of non-coplanar vectors can serve as a basis in three dimensions.
Basis vectors in curvilinear coordinates
For general curvilinear coordinates, basis vectors and components vary from point to point. Consider a n-dimensional vector
that is expressed in a particular Cartesian coordinate system asIf we change the basis vectors to
 , then the same vector may be expressed as
, then the same vector may be expressed aswhere
 are the components of the vector in the new basis. Therefore, the vector sum that describes vector in the new basis is composed of different vectors, although the sum itself remains the same.
are the components of the vector in the new basis. Therefore, the vector sum that describes vector in the new basis is composed of different vectors, although the sum itself remains the same.A coordinate basis whose basis vectors change their direction and/or magnitude from point to point is called local basis. All bases associated with curvilinear coordinates are necessarily local. Global bases, that is, bases composed of basis vectors that are the same in all points can be associated only with linear or affine coordinates. Therefore, for a curvilinear coordinate system with coordinates (
 ), the vector can be expressed as
), the vector can be expressed asCovariant and contravariant bases
Main article: Covariance and contravariance of vectorsBasis vectors are usually associated with a coordinate system by two methods:
- they can be built along the coordinate axes (collinear with axes) or
- they can be built to be perpendicular (normal) to the coordinate surfaces.
In the first case (axis-collinear), basis vectors transform like covariant vectors while in the second case (normal to coordinate surfaces), basis vectors transform like contravariant vectors. Those two types of basis vectors are distinguished by the position of their indices: covariant vectors are designated with lower indices while contravariant vectors are designated with upper indices. Thus, depending on the method by which they are built, for a general curvilinear coordinate system there are two sets of basis vectors for every point:
 is the covariant basis, and
is the covariant basis, and  is the contravariant basis.
is the contravariant basis.We can express a vector (
) in terms either basis, i.e.,A vector is covariant or contravariant if, respectively, its components are covariant or contravariant. From the above vector sums, it can be seen that contravariant vectors are represented with covariant basis vectors, and covariant vectors are represented with contravariant basis vectors.
A key convention in the representation of vectors and tensors in terms of indexed components and basis vectors is invariance in the sense that vector components which transform in a covariant manner (or contravariant manner) are paired with basis vectors that transform in a contravariant manner (or covariant manner).
Covariant basis
Main article: Covariant transformationAs stated above, contravariant vectors are vectors with contravariant components whose location is determined using covariant basis vectors that are built along the coordinate axes. In analogy to the other coordinate elements, transformation of the covariant basis of general curvilinear coordinates is described starting from the Cartesian coordinate system whose basis is called the standard basis. The standard basis in three-dimensional space is a global basis that is composed of 3 mutually orthogonal vectors
each of unit length. Regardless of the method of building the basis (axis-collinear or normal to coordinate surfaces), in the Cartesian system the result is a single set of basis vectors, namely, the standard basis.Constructing a covariant basis in one dimension
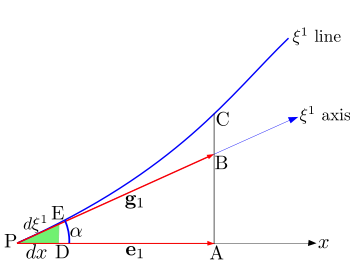 Fig. 3 - Transformation of local covariant basis in the case of general curvilinear coordinates
Fig. 3 - Transformation of local covariant basis in the case of general curvilinear coordinatesConsider the one-dimensional curve shown in Fig. 3. At point P, taken as an origin, x is one of the Cartesian coordinates, and ξ1 is one of the curvilinear coordinates (Fig. 3). The local basis vector is
 and it is built on the ξ1 axis which is a tangent to ξ1 coordinate line at the point P. The axis ξ1 and thus the vector form an angle α with the Cartesian x axis and the Cartesian basis vector
and it is built on the ξ1 axis which is a tangent to ξ1 coordinate line at the point P. The axis ξ1 and thus the vector form an angle α with the Cartesian x axis and the Cartesian basis vector  .
.It can be seen from triangle PAB that
where
 are the magnitudes of the two basis vectors, i.e., the scalar intercepts PB and PA. Note that PA is also the projection of on the x axis.
are the magnitudes of the two basis vectors, i.e., the scalar intercepts PB and PA. Note that PA is also the projection of on the x axis.However, this method for basis vector transformations using directional cosines is inapplicable to curvilinear coordinates for the following reason: By increasing the distance from P, the angle between the curved line ξ1 and Cartesian axis x increasingly deviates from α. At the distance PB the true angle is that which the tangent at point C forms with the x axis and the latter angle is clearly different from α. The angles that the ξ1 line and ξ1 axis form with the x axis become closer in value the closer one moves towards point P and become exactly equal at P. Let point E be located very close to P, so close that the distance PE is infinitesimally small. Then PE measured on the ξ1 axis almost coincides with PE measured on the ξ1 line. At the same time, the ratio
 (PD being the projection of PE on the x axis) becomes almost exactly equal to cos α.
(PD being the projection of PE on the x axis) becomes almost exactly equal to cos α.Let the infinitesimally small intercepts PD and PE be labelled, respectively, as dx and dξ1. Then
 and
and  .
.
Thus, the directional cosines can be substituted in transformations with the more exact ratios between infinitesimally small coordinate intercepts. From the foregoing discussion, it follows that the component (projection) of
on the x axis is .
.
If
 and
and  are smooth (continuously differentiable) functions the transformation ratios can be written as
are smooth (continuously differentiable) functions the transformation ratios can be written as and
and  ,
,
That is, those ratios are partial derivatives of coordinates belonging to one system with respect to coordinates belonging to the other system.
Constructing a covariant basis in three dimensions
Doing the same for the coordinates in the other 2 dimensions,
can be expressed as:Similar equations hold for
 and
and  so that the standard basis is transformed to a local (ordered and normalised) basis by the following system of equations:
so that the standard basis is transformed to a local (ordered and normalised) basis by the following system of equations:Vectors
 in the above equation system are unit vectors (magnitude = 1) directed along the 3 axes of the curvilinear coordinate system. However, basis vectors in general curvilinear system are not required to be of unit length: they can be of arbitrary magnitude and direction.
in the above equation system are unit vectors (magnitude = 1) directed along the 3 axes of the curvilinear coordinate system. However, basis vectors in general curvilinear system are not required to be of unit length: they can be of arbitrary magnitude and direction.By analogous reasoning, one can obtain the inverse transformation from local basis to standard basis:
The above systems of linear equations can be written in matrix form as
 and
and .
.
These are the equations that can be used to transform an Cartesian basis into a curvilinear basis, and vice versa.
The Jacobian of the transformation
The Jacobian matrices of the transformation are the matrices
 and
and  . In three dimensions, the expanded forms of these matrices are
. In three dimensions, the expanded forms of these matrices areIn the second equation system (the inverse transformation), the unknowns are the curvilinear basis vectors which are subject to the condition that in each point of the curvilinear coordinate system there must exist one and only one set of basis vectors. This condition is satisfied if and only if the equation system has a single solution. From linear algebra, it is known that a linear equation system has a single solution only if the determinant of its system matrix is non-zero. For the second equation system, the determinant of the system matrix is
which shows the rationale behind the above requirement concerning the inverse Jacobian determinant.
Another, very important, feature of the above transformations is the nature of the derivatives: in front of the Cartesian basis vectors stand derivatives of Cartesian coordinates while in front of the curvilinear basis vectors stand derivatives of curvililear coordinates. In general, the following definition holds:
Covariant vector is an object that in the system of coordinates x is defined by n ordered numbers or functions (components) ai(x1, x2, x3) and in system ξ it is defined by n ordered components āi(ξ1,ξ2,ξ3) which are connected with ai (x1, x2, x3) in each point of space by the transformation: .
.
Mnemonic: Coordinates co-vary with the vector.This definition is so general that it applies to covariance in the very abstract sense, and includes not only basis vectors, but also all vectors, components, tensors, pseudovectors, and pseudotensors (in the last two there is an additional sign flip). It also serves to define tensors in one of their most usual treatments.
Lamé coefficients
The partial derivative coefficients through which vector transformation is achieved are called also scale factors or Lamé coefficients (named after Gabriel Lamé)
 .
.
However, the hik designation is very rarely used, being largely replaced with √gik, the components of the metric tensor.
Vector and tensor algebra in three-dimensional curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
Elementary vector and tensor algebra in curvilinear coordinates is used in some of the older scientific literature in mechanics and physics and can be indispensable to understanding work from the early and mid 1900s, for example the text by Green and Zerna.[3] Some useful relations in the algebra of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden,[4], Naghdi,[5] Simmonds,[6] Green and Zerna,[3] Basar and Weichert,[7] and Ciarlet.[8]
Vectors in curvilinear coordinates
Let
 be an arbitrary basis for three-dimensional Euclidean space. In general, the basis vectors are neither unit vectors nor mutually orthogonal. However, they are required to be linearly independent. Then a vector can be expressed as[6](p27)
be an arbitrary basis for three-dimensional Euclidean space. In general, the basis vectors are neither unit vectors nor mutually orthogonal. However, they are required to be linearly independent. Then a vector can be expressed as[6](p27)The components vk are the contravariant components of the vector
.The reciprocal basis
 is defined by the relation [6](pp28–29)
is defined by the relation [6](pp28–29)where
 is the Kronecker delta.
is the Kronecker delta.The vector
can also be expressed in terms of the reciprocal basis:The components vk are the covariant components of the vector
.Relations between components and basis vectors
From these definitions we can see that[6](pp30–32)
Also,
Metric tensor
The quantities gij, gij are defined as[6](p39)
From the above equations we have
Identity map
The identity map
 defined by
defined by  can be shown to be[6](p39)
can be shown to be[6](p39)Scalar (Dot) product
The scalar product of two vectors in curvilinear coordinates is[6](p32)
Vector (Cross) product
The cross product of two vectors is given by[6](pp32–34)
where εijk is the permutation symbol and
is a Cartesian basis vector. In curvilinear coordinates, the equivalent expression iswhere
 is the third-order alternating tensor.
is the third-order alternating tensor.Second-order tensors in curvilinear coordinates
A second-order tensor can be expressed as
The components
 are called the contravariant components,
are called the contravariant components,  the mixed right-covariant components,
the mixed right-covariant components,  the mixed left-covariant components, and
the mixed left-covariant components, and  the covariant components of the second-order tensor.
the covariant components of the second-order tensor.Relations between components
The components of the second-order tensor are related by
Action of a second-order tensor on a vector
The action
 can be expressed in curvilinear coordinates as
can be expressed in curvilinear coordinates asInner product of two second-order tensors
The inner product of two second-order tensors
 can be expressed in curvilinear coordinates as
can be expressed in curvilinear coordinates asAlternatively,
Determinant of a second-order tensor
If
 is a second-order tensor, then the determinant is defined by the relation
is a second-order tensor, then the determinant is defined by the relationwhere
 are arbitrary vectors and
are arbitrary vectors andRelations between curvilinear and Cartesian basis vectors
Let (
 ) be the usual Cartesian basis vectors for the Euclidean space of interest and let
) be the usual Cartesian basis vectors for the Euclidean space of interest and letwhere
 is a second-order transformation tensor that maps to . Then,
is a second-order transformation tensor that maps to . Then,From this relation we can show that
Let
 be the Jacobian of the transformation. Then, from the definition of the determinant,
be the Jacobian of the transformation. Then, from the definition of the determinant,Since
we have
A number of interesting results can be derived using the above relations.
First, consider
Then
Similarly, we can show that
Therefore, using the fact that [gij] = [gij] − 1,
Another interesting relation is derived below. Recall that
where A is a, yet undetermined, constant. Then
This observation leads to the relations
In index notation,
where
 is the usual permutation symbol.
is the usual permutation symbol.We have not identified an explicit expression for the transformation tensor
 because an alternative form of the mapping between curvilinear and Cartesian bases is more useful. Assuming a sufficient degree of smoothness in the mapping (and a bit of abuse of notation), we have
because an alternative form of the mapping between curvilinear and Cartesian bases is more useful. Assuming a sufficient degree of smoothness in the mapping (and a bit of abuse of notation), we haveSimilarly,
From these results we have
and
Vector products
The cross product of two vectors is given by
where εijk is the permutation symbol and
is a Cartesian basis vector. Therefore,and
Hence,
Returning back to the vector product and using the relations
gives us
The alternating tensor
In an orthonormal right-handed basis, the third-order alternating tensor is defined as
In a general curvilinear basis the same tensor may be expressed as
It can be shown that
Now,
Hence,
Similarly, we can show that
Vector and tensor calculus in three-dimensional curvilinear coordinates
- Note: the Einstein summation convention of summing on repeated indices is used below.
Simmonds,[6] in his book on tensor analysis, quotes Albert Einstein saying[9]
The magic of this theory will hardly fail to impose itself on anybody who has truly understood it; it represents a genuine triumph of the method of absolute differential calculus, founded by Gauss, Riemann, Ricci, and Levi-Civita.
Vector and tensor calculus in general curvilinear coordinates is used in tensor analysis on four-dimensional curvilinear manifolds in general relativity,[10] in the mechanics of curved shells,[8] in examining the invariance properties of Maxwell's equations which has been of interest in metamaterials[11][12] and in many other fields.
Some useful relations in the calculus of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden,[4] Simmonds,[6] Green and Zerna,[3] Basar and Weichert,[7] and Ciarlet.[8]
Basic definitions
Let the position of a point in space be characterized by three coordinate variables (ξ1,ξ2,ξ3).
The coordinate curve ξ1 represents a curve on which ξ2,ξ3 are constant. Let
 be the position vector of the point relative to some origin. Then, assuming that such a mapping and its inverse exist and are continuous, we can write [4](p55)
be the position vector of the point relative to some origin. Then, assuming that such a mapping and its inverse exist and are continuous, we can write [4](p55)The fields
 are called the curvilinear coordinate functions of the curvilinear coordinate system
are called the curvilinear coordinate functions of the curvilinear coordinate system  .
.The ξi coordinate curves are defined by the one-parameter family of functions given by
with ξj,ξk fixed.
Tangent vector to coordinate curves
The tangent vector to the curve
 at the point
at the point  (or to the coordinate curve ξi at the point ) is
(or to the coordinate curve ξi at the point ) isGradient of a scalar field
Let
 be a scalar field in space. Then
be a scalar field in space. ThenThe gradient of the field f is defined by
where
 is an arbitrary constant vector. If we define the components ci of vector such that
is an arbitrary constant vector. If we define the components ci of vector such thatthen
If we set
 , then since
, then since  , we have
, we havewhich provides a means of extracting the contravariant component of a vector
.If
is the covariant (or natural) basis at a point, and if  is the contravariant (or reciprocal) basis at that point, then
is the contravariant (or reciprocal) basis at that point, thenA brief rationale for this choice of basis is given in the next section.
Gradient of a vector field
A similar process can be used to arrive at the gradient of a vector field
 . The gradient is given by
. The gradient is given byIf we consider the gradient of the position vector field
 , then we can show that
, then we can show thatThe vector field
is tangent to the ξi coordinate curve and forms a natural basis at each point on the curve. This basis, as discussed at the beginning of this article, is also called the covariant curvilinear basis. We can also define a reciprocal basis, or contravariant curvilinear basis, . All the algebraic relations between the basis vectors, as discussed in the section on tensor algebra, apply for the natural basis and its reciprocal at each point .Since
is arbitrary, we can writeNote that the contravariant basis vector
is perpendicular to the surface of constant ψi and is given byChristoffel symbols of the first kind
The Christoffel symbols of the first kind are defined as
To express Γijk in terms of gij we note that
Since
 we have Γijk = Γjik. Using these to rearrange the above relations gives
we have Γijk = Γjik. Using these to rearrange the above relations givesChristoffel symbols of the second kind
The Christoffel symbols of the second kind are defined as
This implies that
Other relations that follow are
Another particularly useful relation, which shows that the Christoffel symbol depends only on the metric tensor and its derivatives, is
Explicit expression for the gradient of a vector field
The following expressions for the gradient of a vector field in curvilinear coordinates are quite useful.
Representing a physical vector field
The vector field
can be represented aswhere
 are the covariant components of the field,
are the covariant components of the field,  are the physical components, and
are the physical components, andis the normalized contravariant basis vector.
Divergence of a vector field
The divergence of a vector field (
)is defined asIn terms of components with respect to a curvilinear basis
Alternative expression for the divergence of a vector field
An alternative equation for the divergence of a vector field is frequently used. To derive this relation recall that
Now,
Noting that, due to the symmetry of
 ,
,we have
Recall that if [gij] is the matrix whose components are gij, then the inverse of the matrix is [gij] − 1 = [gij]. The inverse of the matrix is given by
where Aij are the cofactor matrices of the components gij. From matrix algebra we have
Hence,
Plugging this relation into the expression for the divergence gives
A little manipulation leads to the more compact form
Laplacian of a scalar field
The Laplacian of a scalar field
 is defined as
is defined asUsing the alternative expression for the divergence of a vector field gives us
Now
Therefore,
Curl of a vector field
The curl of a vector field
in covariant curvilinear coordinates can be written aswhere
Gradient of a second-order tensor field
The gradient of a second order tensor field can similarly be expressed as
Explicit expressions for the gradient
If we consider the expression for the tensor in terms of a contravariant basis, then
We may also write
Representing a physical second-order tensor field
The physical components of a second-order tensor field can be obtained by using a normalized contravariant basis, i.e.,
where the hatted basis vectors have been normalized. This implies that
Divergence of a second-order tensor field
The divergence of a second-order tensor field is defined using
where
 is an arbitrary constant vector. [13] In curvilinear coordinates,
is an arbitrary constant vector. [13] In curvilinear coordinates,Orthogonal curvilinear coordinates
Assume, for the purposes of this section, that the curvilinear coordinate system is orthogonal, i.e.,
or equivalently,
where
 . As before,
. As before,  are covariant basis vectors and
are covariant basis vectors and  are contravariant basis vectors. Also, let () be a background, fixed, Cartesian basis. A list of orthogonal curvilinear coordinates is given below.
are contravariant basis vectors. Also, let () be a background, fixed, Cartesian basis. A list of orthogonal curvilinear coordinates is given below.Orthogonal coordinate systems Two dimensional orthogonal coordinate systems Three dimensional orthogonal coordinate systems Cartesian coordinate system • Cylindrical coordinate system • Spherical coordinate system • Parabolic cylindrical coordinates • Paraboloidal coordinates • Oblate spheroidal coordinates • Prolate spheroidal coordinates • Ellipsoidal coordinates • Elliptic cylindrical coordinates • Toroidal coordinates • Bispherical coordinates • Bipolar cylindrical coordinates • Conical coordinates • Flat-ring cyclide coordinates • Flat-disk cyclide coordinates • Bi-cyclide coordinates • Cap-cyclide coordinates • Concave bi-sinusoidal single-centered coordinates • Concave bi-sinusoidal double-centered coordinates • Convex inverted-sinusoidal spherically-aligned coordinates • Quasi-random-intersection cartesian coordinatesMetric tensor in orthogonal curvilinear coordinates
Main article: Metric tensorLet
 be the position vector of the point with respect to the origin of the coordinate system. The notation can be simplified by noting that
be the position vector of the point with respect to the origin of the coordinate system. The notation can be simplified by noting that  . At each point we can construct a small line element
. At each point we can construct a small line element  . The square of the length of the line element is the scalar product
. The square of the length of the line element is the scalar product  and is called the metric of the space. Recall that the space of interest is assumed to be Euclidean when we talk of curvilinear coordinates. Let us express the position vector in terms of the background, fixed, Cartesian basis, i.e.,
and is called the metric of the space. Recall that the space of interest is assumed to be Euclidean when we talk of curvilinear coordinates. Let us express the position vector in terms of the background, fixed, Cartesian basis, i.e.,Using the chain rule, we can then express
in terms of three-dimensional orthogonal curvilinear coordinates (ξ1,ξ2,ξ3) asTherefore the metric is given by
The symmetric quantity
is called the fundamental (or metric) tensor of the Euclidean space in curvilinear coordinates.
Note also that
where
 are the Lamé coefficients.
are the Lamé coefficients.If we define the scale factors,
 , using
, usingwe get a relation between the fundamental tensor and the Lamé coefficients.
Example: Polar coordinates
If we consider polar coordinates for R2, note that
(r, θ) are the curvilinear coordinates, and the Jacobian determinant of the transformation (r,θ) → (r cos θ, r sin θ) is r.
The orthogonal basis vectors are gr = (cos θ, sin θ), gθ = (−r sin θ, r cos θ). The normalized basis vectors are er = (cos θ, sin θ), eθ = (−sin θ, cos θ) and the scale factors are hr = 1 and hθ= r. The fundamental tensor is g11 =1, g22 =r2, g12 = g21 =0.
Line and surface integrals
If we wish to use curvilinear coordinates for vector calculus calculations, adjustments need to be made in the calculation of line, surface and volume integrals. For simplicity, we again restrict the discussion to three dimensions and orthogonal curvilinear coordinates. However, the same arguments apply for n-dimensional problems though there are some additional terms in the expressions when the coordinate system is not orthogonal.
Line integrals
Normally in the calculation of line integrals we are interested in calculating
where x(t) parametrizes C in Cartesian coordinates. In curvilinear coordinates, the term
by the chain rule. And from the definition of the Lamé coefficients,
and thus
Now, since
 when
when  , we have
, we haveand we can proceed normally.
Surface integrals
Likewise, if we are interested in a surface integral, the relevant calculation, with the parameterization of the surface in Cartesian coordinates is:
Again, in curvilinear coordinates, we have
and we make use of the definition of curvilinear coordinates again to yield
Therefore,
where
 is the permutation symbol.
is the permutation symbol.In determinant form, the cross product in terms of curvilinear coordinates will be:
Grad, curl, div, Laplacian
In orthogonal curvilinear coordinates of 3 dimensions, where
one can express the gradient of a scalar or vector field as
For an orthogonal basis
The divergence of a vector field can then be written as
Also,
Therefore,
We can get an expression for the Laplacian in a similar manner by noting that
Then we have
The expressions for the gradient, divergence, and Laplacian can be directly extended to n-dimensions.
The curl of a vector field is given by
where Ω is the product of all hi and εijk is the Levi-Civita symbol.
Example: Cylindrical polar coordinates
For cylindrical coordinates we have
and
where
Then the covariant and contravariant basis vectors are
where
 are the unit vectors in the r,θ,z directions.
are the unit vectors in the r,θ,z directions.Note that the components of the metric tensor are such that
which shows that the basis is orthogonal.
The non-zero components of the Christoffel symbol of the second kind are
Representing a physical vector field
The normalized contravariant basis vectors in cylindrical polar coordinates are
and the physical components of a vector
areGradient of a scalar field
The gradient of a scalar field,
, in cylindrical coordinates can now be computed from the general expression in curvilinear coordinates and has the formGradient of a vector field
Similarly, the gradient of a vector field,
 , in cylindrical coordinates can be shown to be
, in cylindrical coordinates can be shown to beDivergence of a vector field
Using the equation for the divergence of a vector field in curvilinear coordinates, the divergence in cylindrical coordinates can be shown to be
Laplacian of a scalar field
The Laplacian is more easily computed by noting that
 . In cylindrical polar coordinates
. In cylindrical polar coordinatesHence,
Representing a physical second-order tensor field
The physical components of a second-order tensor field are those obtained when the tensor is expressed in terms of a normalized contravariant basis. In cylindrical polar coordinates these components are
Gradient of a second-order tensor field
Using the above definitions we can show that the gradient of a second-order tensor field in cylindrical polar coordinates can be expressed as
Divergence of a second-order tensor field
The divergence of a second-order tensor field in cylindrical polar coordinates can be obtained from the expression for the gradient by collecting terms where the scalar product of the two outer vectors in the dyadic products is nonzero. Therefore,
Fictitious forces in general curvilinear coordinates
An inertial coordinate system is defined as a system of space and time coordinates x1, x2, x3, t in terms of which the equations of motion of a particle free of external forces are simply d2xj/dt2 = 0.[14] In this context, a coordinate system can fail to be “inertial” either due to non-straight time axis or non-straight space axes (or both). In other words, the basis vectors of the coordinates may vary in time at fixed positions, or they may vary with position at fixed times, or both. When equations of motion are expressed in terms of any non-inertial coordinate system (in this sense), extra terms appear, called Christoffel symbols. Strictly speaking, these terms represent components of the absolute acceleration (in classical mechanics), but we may also choose to continue to regard d2xj/dt2 as the acceleration (as if the coordinates were inertial) and treat the extra terms as if they were forces, in which case they are called fictitious forces.[15] The component of any such fictitious force normal to the path of the particle and in the plane of the path’s curvature is then called centrifugal force.[16]
This more general context makes clear the correspondence between the concepts of centrifugal force in rotating coordinate systems and in stationary curvilinear coordinate systems. (Both of these concepts appear frequently in the literature.[17][18][19]) For a simple example, consider a particle of mass m moving in a circle of radius r with angular speed w relative to a system of polar coordinates rotating with angular speed W. The radial equation of motion is mr” = Fr + mr(w+W)2. Thus the centrifugal force is mr times the square of the absolute rotational speed A = w + W of the particle. If we choose a coordinate system rotating at the speed of the particle, then W = A and w = 0, in which case the centrifugal force is mrA2, whereas if we choose a stationary coordinate system we have W = 0 and w = A, in which case the centrifugal force is again mrA2. The reason for this equality of results is that in both cases the basis vectors at the particle’s location are changing in time in exactly the same way. Hence these are really just two different ways of describing exactly the same thing, one description being in terms of rotating coordinates and the other being in terms of stationary curvilinear coordinates, both of which are non-inertial according to the more abstract meaning of that term.
When describing general motion, the actual forces acting on a particle are often referred to the instantaneous osculating circle tangent to the path of motion, and this circle in the general case is not centered at a fixed location, and so the decomposition into centrifugal and Coriolis components is constantly changing. This is true regardless of whether the motion is described in terms of stationary or rotating coordinates.
See also
- Covariance and contravariance
- Basic introduction to the mathematics of curved spacetime
- Orthogonal coordinates
- Frenet-Serret formulas
- Covariant derivative
- Tensor derivative (continuum mechanics)
- Curvilinear perspective
- Del in cylindrical and spherical coordinates
References
- Notes
- ^ Boothby, W. M. (2002). An Introduction to Differential Manifolds and Riemannian Geometry (revised ed.). New York, NY: Academic Press.
- ^ McConnell, A. J. (1957). Application of Tensor Analysis. New York, NY: Dover Publications, Inc.. Ch. 9, sec. 1. ISBN 0486603733.
- ^ a b c Green, A. E.; Zerna, W. (1968). Theoretical Elasticity. Oxford University Press. ISBN 0198534868.
- ^ a b c Ogden, R. W. (2000). Nonlinear elastic deformations. Dover.
- ^ Naghdi, P. M. (1972). "Theory of shells and plates". In S. Flügge. Handbook of Physics. VIa/2. pp. 425–640.
- ^ a b c d e f g h i j Simmonds, J. G. (1994). A brief on tensor analysis. Springer. ISBN 0387906398.
- ^ a b Basar, Y.; Weichert, D. (2000). Numerical continuum mechanics of solids: fundamental concepts and perspectives. Springer.
- ^ a b c Ciarlet, P. G. (2000). Theory of Shells. 1. Elsevier Science.
- ^ Einstein, A. (1915). "Contribution to the Theory of General Relativity". In Laczos, C.. The Einstein Decade. p. 213. ISBN 0521381053.
- ^ Misner, C. W.; Thorne, K. S.; Wheeler, J. A. (1973). Gravitation. W. H. Freeman and Co.. ISBN 0716703440.
- ^ Greenleaf, A.; Lassas, M.; Uhlmann, G. (2003). "Anisotropic conductivities that cannot be detected by EIT". Physiological measurement 24 (2): 413–419. doi:10.1088/0967-3334/24/2/353. PMID 12812426.
- ^ Leonhardt, U.; Philbin, T.G. (2006). "General relativity in electrical engineering". New Journal of Physics 8: 247.
- ^ "The divergence of a tensor field". Introduction to Elasticity/Tensors. Wikiversity. http://en.wikiversity.org/wiki/Introduction_to_Elasticity/Tensors#The_divergence_of_a_tensor_field. Retrieved 2010-11-26.
- ^ Friedman, Michael (1989). The Foundations of Space–Time Theories. Princeton University Press. ISBN 0691072396.
- ^ Stommel, Henry M.; Moore, Dennis W. (1989). An Introduction to the Coriolis Force. Columbia University Press. ISBN 0231066368.
- ^ Beer; Johnston (1972). Statics and Dynamics (2nd ed.). McGraw-Hill. p. 485. ISBN 0077366506.
- ^ Hildebrand, Francis B. (1992). Methods of Applied Mathematics. Dover. p. 156. ISBN 0135792010.
- ^ McQuarrie, Donald Allan (2000). Statistical Mechanics. University Science Books. ISBN 0060443669.
- ^ Weber, Hans-Jurgen; Arfken, George Brown (2004). Essential Mathematical Methods for Physicists. Academic Press. p. 843. ISBN 0120598779.
- Further reading
External links
Categories:- Coordinate systems
- Metric tensors
































![\mathbf{u}\times\mathbf{v} = [(\mathbf{g}_m\times\mathbf{g}_n)\cdot\mathbf{g}_s]~u^m~v^n~\mathbf{g}^s
= \mathcal{E}_{smn}~u^m~v^n~\mathbf{g}^s](3/f63b288d41a471fcf949daadfaea38ac.png)





![\left[\boldsymbol{S}\cdot\mathbf{u}, \boldsymbol{S}\cdot\mathbf{v}, \boldsymbol{S}\cdot\mathbf{w}\right] = \det\boldsymbol{S}\left[\mathbf{u}, \mathbf{v}, \mathbf{w}\right]](1/3110a703f117ffa2be95c368de108328.png)
![\left[\mathbf{u},\mathbf{v},\mathbf{w}\right] := \mathbf{u}\cdot(\mathbf{v}\times\mathbf{w})~.](d/93d2757a38c4f8f312b8e6db83e849cc.png)


![\mathbf{g}^i = \boldsymbol{F}^{-\rm{T}}\cdot\mathbf{e}^i ~;~~ g^{ij} = [\boldsymbol{F}^{-\rm{1}}\cdot\boldsymbol{F}^{-\rm{T}}]_{ij} ~;~~ g_{ij} = [g^{ij}]^{-1} = [\boldsymbol{F}^{\rm{T}}\cdot\boldsymbol{F}]_{ij}](1/0d1c9b8131ad909391b5c11785cfbbd3.png)
![\left[\mathbf{g}_1,\mathbf{g}_2,\mathbf{g}_3\right] = \det\boldsymbol{F}\left[\mathbf{e}_1,\mathbf{e}_2,\mathbf{e}_3\right] ~.](a/a8ae4ac393657aff53653cc29c756307.png)
![\left[\mathbf{e}_1,\mathbf{e}_2,\mathbf{e}_3\right] = 1](8/b280842d4ae11ef0163fc5ef3fa3650f.png)
![J = \det\boldsymbol{F} = \left[\mathbf{g}_1,\mathbf{g}_2,\mathbf{g}_3\right] = \mathbf{g}_1\cdot(\mathbf{g}_2\times\mathbf{g}_3)](b/6db4c834466302d513e9f8e3207a0e6b.png)
![g := \det[g_{ij}]\,](5/6c518c96c748dec0e3356e35f899fd23.png)
![g = \det[\boldsymbol{F}^{\rm{T}}]\cdot\det[\boldsymbol{F}] = J\cdot J = J^2](d/72d11860105a097d9bcf0c8254ec6bba.png)
![\det[g^{ij}] = \cfrac{1}{J^2}](f/3affa8f75b878e86a0f4df32bead9863.png)














![\mathbf{u}\times\mathbf{v} = \epsilon_{ijk}~\hat{u}_j~\hat{v}_k~\mathbf{e}_i
= \epsilon_{ijk}~\frac{\partial x_j}{\partial \xi^m}~\frac{\partial x_k}{\partial \xi^n}~\frac{\partial x_i}{\partial \xi^s}~ u^m~v^n~\mathbf{g}^s
= [(\mathbf{g}_m\times\mathbf{g}_n)\cdot\mathbf{g}_s]~u^m~v^n~\mathbf{g}^s
= \mathcal{E}_{smn}~u^m~v^n~\mathbf{g}^s](c/02c0855f6574d20028f5a59beaaf86dd.png)


![\mathcal{E}_{ijk} = \left[\mathbf{g}_i,\mathbf{g}_j,\mathbf{g}_k\right] =(\mathbf{g}_i\times\mathbf{g}_j)\cdot\mathbf{g}_k ~;~~
\mathcal{E}^{ijk} = \left[\mathbf{g}^i,\mathbf{g}^j,\mathbf{g}^k\right]](7/9a7b289d7e0422d6c5ffedc1d0746275.png)



![\mathbf{x} = \boldsymbol{\varphi}(\xi^1, \xi^2, \xi^3) ~;~~ \xi^i = \psi^i(\mathbf{x}) = [\boldsymbol{\varphi}^{-1}(\mathbf{x})]^i](c/22c53f272025c23f5b04818cb21fcd2d.png)


![f(\mathbf{x}) = f[\boldsymbol{\varphi}(\xi^1,\xi^2,\xi^3)] = f_\varphi(\xi^1,\xi^2,\xi^3)](d/6fd169449abba06a5bf32918561f82ae.png)
![[\boldsymbol{\nabla}f(\mathbf{x})]\cdot\mathbf{c} = \cfrac{\rm{d}}{\rm{d}\alpha} f(\mathbf{x}+\alpha\mathbf{c})\biggr|_{\alpha=0}](4/7f49b32b2822cbe686f0040fa5eee725.png)

![[\boldsymbol{\nabla}f(\mathbf{x})]\cdot\mathbf{c} = \cfrac{\rm{d}}{\rm{d}\alpha} f_\varphi(\xi^1 + \alpha~c^1, \xi^2 + \alpha~c^2, \xi^3 + \alpha~c^3)\biggr|_{\alpha=0} = \cfrac{\partial f_\varphi}{\partial \xi^i}~c^i = \cfrac{\partial f}{\partial \xi^i}~c^i](8/f785e2402e1b771a87fdfe8b00ece0ef.png)
![[\boldsymbol{\nabla}\psi^i(\mathbf{x})]\cdot\mathbf{c} = \cfrac{\partial \psi^i}{\partial \xi^j}~c^j = c^i](4/8f4434f849db8b9a96faad08de05d3ce.png)
![[\boldsymbol{\nabla}f(\mathbf{x})]\cdot\mathbf{c} = \cfrac{\partial f}{\partial \xi^i}~c^i = \left(\cfrac{\partial f}{\partial \xi^i}~\mathbf{g}^i\right)
\left(c^i~\mathbf{g}_i\right) \quad \implies \quad \boldsymbol{\nabla}f(\mathbf{x}) = \cfrac{\partial f}{\partial \xi^i}~\mathbf{g}^i](8/5583d5e2b2dca302482eadb3b83d36d3.png)
![[\boldsymbol{\nabla}\mathbf{f}(\mathbf{x})]\cdot\mathbf{c} = \cfrac{\partial \mathbf{f}}{\partial \xi^i}~c^i](c/b3c1c7adbc0ff2ace3c8dd5b5361ab80.png)





![\Gamma_{ijk} = \frac{1}{2}(g_{ik,j} + g_{jk,i} - g_{ij,k})
= \frac{1}{2}[(\mathbf{g}_i\cdot\mathbf{g}_k)_{,j} + (\mathbf{g}_j\cdot\mathbf{g}_k)_{,i} - (\mathbf{g}_i\cdot\mathbf{g}_j)_{,k}]](d/b3dab315424bd54cd60284d74643ae82.png)




![\begin{align}
\boldsymbol{\nabla}\mathbf{v} & = \left[\cfrac{\partial v^i}{\partial \xi^k} + \Gamma^i_{lk}~v^l\right]~\mathbf{g}_i\otimes\mathbf{g}^k \\
& = \left[\cfrac{\partial v_i}{\partial \xi^k} - \Gamma^l_{ki}~v_l\right]~\mathbf{g}^i\otimes\mathbf{g}^k
\end{align}](5/4e5a414d4a1648ec30b1e196c5e18539.png)



![\boldsymbol{\nabla}\cdot\mathbf{v} = \cfrac{\partial v^i}{\partial \xi^i} + \Gamma^i_{\ell i}~v^\ell
= \left[\cfrac{\partial v_i}{\partial \xi^j} - \Gamma^\ell_{ji}~v_\ell\right]~g^{ij}](4/dc405a67b3772e57b72e1297135d9288.png)

![\Gamma_{\ell i}^i = \Gamma_{i\ell}^i = \cfrac{g^{mi}}{2}\left[\frac{\partial g_{im}}{\partial \xi^\ell} +
\frac{\partial g_{\ell m}}{\partial \xi^i} - \frac{\partial g_{il}}{\partial \xi^m}\right]](c/1bc376cde6effe3b3748a953048f31a6.png)


![[g^{ij}] = [g_{ij}]^{-1} = \cfrac{A^{ij}}{g} ~;~~ g := \det([g_{ij}]) = \det\boldsymbol{g}](6/4f6fd9bbe88d4a71b7236b9fbba67b69.png)
![g = \det([g_{ij}]) = \sum_i g_{ij}~A^{ij} \quad \implies \quad
\frac{\partial g}{\partial g_{ij}} = A^{ij}](1/3e1cefeef5a37292e9e50ebed727ca26.png)
![[g^{ij}] = \cfrac{1}{g}~\frac{\partial g}{\partial g_{ij}}](f/d2f3d50c71901f3b37a1cccadd320756.png)



![\nabla^2 \varphi = \cfrac{1}{\sqrt{g}}~\frac{\partial }{\partial \xi^i}([\boldsymbol{\nabla} \varphi]^i~\sqrt{g})](2/3a2a6160ad86181fa1a713ebe4beeeb1.png)
![\boldsymbol{\nabla} \varphi = \frac{\partial \varphi}{\partial \xi^l}~\mathbf{g}^l = g^{li}~\frac{\partial \varphi}{\partial \xi^l}~\mathbf{g}_i
\quad \implies \quad
[\boldsymbol{\nabla} \varphi]^i = g^{li}~\frac{\partial \varphi}{\partial \xi^l}](7/e77097c223353d68f98cb69a84fa7c76.png)




![\boldsymbol{\nabla}\boldsymbol{S} = \cfrac{\partial}{\partial \xi^k}[S_{ij}~\mathbf{g}^i\otimes\mathbf{g}^j]\otimes\mathbf{g}^k
= \left[\cfrac{\partial S_{ij}}{\partial \xi^k} - \Gamma^l_{ki}~S_{lj} - \Gamma^l_{kj}~S_{il}\right]~\mathbf{g}^i\otimes\mathbf{g}^j\otimes\mathbf{g}^k](1/b9183b1119533404756a5180c0d589d2.png)
![\begin{align}
\boldsymbol{\nabla}\boldsymbol{S} & = \left[\cfrac{\partial S^{ij}}{\partial \xi^k} + \Gamma^i_{kl}~S^{lj} + \Gamma^j_{kl}~S^{il}\right]~\mathbf{g}_i\otimes\mathbf{g}_j\otimes\mathbf{g}^k \\
& = \left[\cfrac{\partial S^i_{~j}}{\partial \xi^k} + \Gamma^i_{kl}~S^l_{~j} - \Gamma^l_{kj}~S^i_{~l}\right]~\mathbf{g}_i\otimes\mathbf{g}^j\otimes\mathbf{g}^k \\
& = \left[\cfrac{\partial S_i^{~j}}{\partial \xi^k} - \Gamma^l_{ik}~S_l^{~j} + \Gamma^j_{kl}~S_i^{~l}\right]~\mathbf{g}^i\otimes\mathbf{g}_j\otimes\mathbf{g}^k
\end{align}](1/1510c764a6830867d15a28d8b3fcd84c.png)



![\begin{align}
\boldsymbol{\nabla}\cdot\boldsymbol{S} & = \left[\cfrac{\partial S_{ij}}{\partial \xi^k} - \Gamma^l_{ki}~S_{lj} - \Gamma^l_{kj}~S_{il}\right]~g^{ik}~\mathbf{g}^j \\
& = \left[\cfrac{\partial S^{ij}}{\partial \xi^i} + \Gamma^i_{il}~S^{lj} + \Gamma^j_{il}~S^{il}\right]~\mathbf{g}_j \\
& = \left[\cfrac{\partial S^i_{~j}}{\partial \xi^i} + \Gamma^i_{il}~S^l_{~j} - \Gamma^l_{ij}~S^i_{~l}\right]~\mathbf{g}^j \\
& = \left[\cfrac{\partial S_i^{~j}}{\partial \xi^k} - \Gamma^l_{ik}~S_l^{~j} + \Gamma^j_{kl}~S_i^{~l}\right]~g^{ik}~\mathbf{g}_j
\end{align}](3/a736cf6f7f157dc1a3acfbc343fb0c51.png)







































![\mathbf{v} = \boldsymbol{\nabla}f = \left[v_r~~ v_\theta~~ v_z\right] = \left[\cfrac{\partial f}{\partial r}~~ \cfrac{1}{r}\cfrac{\partial f}{\partial \theta}~~ \cfrac{\partial f}{\partial z} \right]](b/d5bcc8a1532e47b44c641f74cf3025c6.png)
![\boldsymbol{\nabla}\cdot\mathbf{v} = \boldsymbol{\nabla}^2 f = \cfrac{\partial^2 f}{\partial r^2} +
\cfrac{1}{r}\left(\cfrac{1}{r}\cfrac{\partial^2f}{\partial \theta^2} + \cfrac{\partial f}{\partial r} \right)
+ \cfrac{\partial^2 f}{\partial z^2}
= \cfrac{1}{r}\left[\cfrac{\partial}{\partial r}\left(r\cfrac{\partial f}{\partial r}\right)\right] + \cfrac{1}{r^2}\cfrac{\partial^2f}{\partial \theta^2} + \cfrac{\partial^2 f}{\partial z^2}](0/f705345f6883210ed6d39324719047ca.png)

![\begin{align}
\boldsymbol{\nabla} \boldsymbol{S} & = \frac{\partial S_{rr}}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_r\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{rr}}{\partial \theta} - (S_{\theta r}+S_{r\theta})\right]~\mathbf{e}_r\otimes\mathbf{e}_r\otimes\mathbf{e}_\theta +
\frac{\partial S_{rr}}{\partial z}~\mathbf{e}_r\otimes\mathbf{e}_r\otimes\mathbf{e}_z \\
& + \frac{\partial S_{r\theta}}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{r\theta}}{\partial \theta} + (S_{rr}-S_{\theta\theta})\right]~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_\theta +
\frac{\partial S_{r\theta}}{\partial z}~\mathbf{e}_r\otimes\mathbf{e}_\theta\otimes\mathbf{e}_z \\
& + \frac{\partial S_{rz}}{\partial r}~\mathbf{e}_r\otimes\mathbf{e}_z\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{rz}}{\partial \theta} -S_{\theta z}\right]~\mathbf{e}_r\otimes\mathbf{e}_z\otimes\mathbf{e}_\theta +
\frac{\partial S_{rz}}{\partial z}~\mathbf{e}_r\otimes\mathbf{e}_z\otimes\mathbf{e}_z \\
& + \frac{\partial S_{\theta r}}{\partial r}~\mathbf{e}_\theta\otimes\mathbf{e}_r\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{\theta r}}{\partial \theta} + (S_{rr}-S_{\theta\theta})\right]~\mathbf{e}_\theta\otimes\mathbf{e}_r\otimes\mathbf{e}_\theta +
\frac{\partial S_{\theta r}}{\partial z}~\mathbf{e}_\theta\otimes\mathbf{e}_r\otimes\mathbf{e}_z \\
& + \frac{\partial S_{\theta\theta}}{\partial r}~\mathbf{e}_\theta\otimes\mathbf{e}_\theta\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{\theta\theta}}{\partial \theta} + (S_{r\theta}+S_{\theta r})\right]~\mathbf{e}_\theta\otimes\mathbf{e}_\theta\otimes\mathbf{e}_\theta +
\frac{\partial S_{\theta\theta}}{\partial z}~\mathbf{e}_\theta\otimes\mathbf{e}_\theta\otimes\mathbf{e}_z \\
& + \frac{\partial S_{\theta z}}{\partial r}~\mathbf{e}_\theta\otimes\mathbf{e}_z\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{\theta z}}{\partial \theta} + S_{rz}\right]~\mathbf{e}_\theta\otimes\mathbf{e}_z\otimes\mathbf{e}_\theta +
\frac{\partial S_{\theta z}}{\partial z}~\mathbf{e}_\theta\otimes\mathbf{e}_z\otimes\mathbf{e}_z \\
& + \frac{\partial S_{zr}}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_r\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{zr}}{\partial \theta} - S_{z\theta}\right]~\mathbf{e}_z\otimes\mathbf{e}_r\otimes\mathbf{e}_\theta +
\frac{\partial S_{zr}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_r\otimes\mathbf{e}_z \\
& + \frac{\partial S_{z\theta}}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_\theta\otimes\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{z\theta}}{\partial \theta} + S_{zr}\right]~\mathbf{e}_z\otimes\mathbf{e}_\theta\otimes\mathbf{e}_\theta +
\frac{\partial S_{z\theta}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_\theta\otimes\mathbf{e}_z \\
& + \frac{\partial S_{zz}}{\partial r}~\mathbf{e}_z\otimes\mathbf{e}_z\otimes\mathbf{e}_r +
\cfrac{1}{r}~\frac{\partial S_{zz}}{\partial \theta}~\mathbf{e}_z\otimes\mathbf{e}_z\otimes\mathbf{e}_\theta +
\frac{\partial S_{zz}}{\partial z}~\mathbf{e}_z\otimes\mathbf{e}_z\otimes\mathbf{e}_z
\end{align}](8/81855482c01618b9286b0d7a8f10d741.png)
![\begin{align}
\boldsymbol{\nabla}\cdot \boldsymbol{S} & = \frac{\partial S_{rr}}{\partial r}~\mathbf{e}_r
+ \frac{\partial S_{r\theta}}{\partial r}~\mathbf{e}_\theta
+ \frac{\partial S_{rz}}{\partial r}~\mathbf{e}_z \\
& +
\cfrac{1}{r}\left[\frac{\partial S_{\theta r}}{\partial \theta} + (S_{rr}-S_{\theta\theta})\right]~\mathbf{e}_r +
\cfrac{1}{r}\left[\frac{\partial S_{\theta\theta}}{\partial \theta} + (S_{r\theta}+S_{\theta r})\right]~\mathbf{e}_\theta +\cfrac{1}{r}\left[\frac{\partial S_{\theta z}}{\partial \theta} + S_{rz}\right]~\mathbf{e}_z \\
& +
\frac{\partial S_{zr}}{\partial z}~\mathbf{e}_r +
\frac{\partial S_{z\theta}}{\partial z}~\mathbf{e}_\theta +
\frac{\partial S_{zz}}{\partial z}~\mathbf{e}_z
\end{align}](5/955924b3a3aac5d7f4c08c03ff3bedb7.png)
Wikimedia Foundation. 2010.