- Prosthesis
-
For other uses, see Prosthesis (disambiguation).Not to be confused with Orthotic.
 A man with two prosthetic arms playing table football.
A man with two prosthetic arms playing table football.
In medicine, a prosthesis, prosthetic, or prosthetic limb (Greek: πρόσθεσις "addition") is an artificial device extension that replaces a missing body part. It is part of the field of biomechatronics, the science of using mechanical devices with human muscle, skeleton, and nervous systems to assist or enhance motor control lost by trauma, disease, or defect. Prostheses are typically used to replace parts lost by injury (traumatic) or missing from birth (congenital) or to supplement defective body parts. Inside the body, artificial heart valves are in common use with artificial hearts and lungs seeing less common use but under active technology development. Other medical devices and aids that can be considered prosthetics include hearing aids, artificial eyes, palatal obturator, gastric bands, and dentures.
Prosthetics are specifically not orthotics, although given certain circumstances a prosthetic might end up performing some or all of the same functionary benefits as an orthotic. Prostheses (or "A" prosthesis) are technically the complete finished item. For instance, a C-Leg knee alone is not a prosthesis, but only a prosthetic part. The complete prosthesis would consist of the stump attachment system - usually a "socket", and all the attachment hardware parts all the way down to and including the foot. Keep this in mind as often nomenclature is interchanged.
Contents
History
 Prosthetic toe from ancient Egypt
Prosthetic toe from ancient EgyptProsthetics have been mentioned throughout history. The earliest recorded mention is the warrior queen Vishpala in the Rigveda.[1] Egyptians were early pioneers of the idea, such as a wooden toe found on a body from the New Kingdom.[2] Roman bronze crowns have also been found, but their use could have been more aesthetic than medical.[3]
Another early recorded mention of a prosthetic was done by the historian Herodotus, who tells the story of a Hegistratus, a Persian soldier, who cut off his own foot to escape his captors and replaced it with a wooden one[citation needed]. Pliny the Elder also recorded that a Roman general who had his arm cut off had an iron one made to hold his shield up when he returned to battle. A famous and quite refined[4] historical prosthetic arm was that of Götz von Berlichingen, made in the beginning of the 16th century.
Around the same time, François de la Noue is also reported to have had an iron hand, as is, in the 17th century, René-Robert Cavalier de la Salle.[5] During the Dark Ages, prosthetics remained quite basic in form. Debilitated knights would be fitted with prosthetics so they could be fitted with a shield. Only the wealthy were able to afford anything that would assist in daily function. During the Renaissance, prosthetics also underwent a rebirth. Prosthetics development using iron, steel, copper, and wood started. Functional prosthetics began to make an appearance in the 1500s.
Gotz von Berlichingen, a German mercenary, developed a pair of iron hands that could be moved by relaxing a series of releases and springs. Record written by an Italian surgeon also notes the existence of amputee who had an arm that allowed him to remove his hat, open his purse, and sign his name. Improvement in amputation surgery and prosthetic design came at the hands of Ambroise Paré. Among his inventions was an above-knee device that was a kneeling peg leg and foot prosthesis that had a fixed position, adjustable harness, and knee lock control. The functionality of his advancements showed what future prosthetics would function.
Other major improvements before the modern era:
- Pieter Verduyn - First nonlocking below-knee (BK) prosthesis.
- James Potts - Prosthesis made of a wooden shank and socket, a steel knee joint and an articulated foot that was controlled by catgut tendons from the knee to the ankle. Came to be known as “Anglesey Leg” or “Selpho Leg.”
- Sir James Syme - A new method of ankle amputation that did not involve amputating at the thigh.
- Benjamin Palmer - Improved upon the Selpho leg. Added an anterior spring and concealed tendons to simulate natural-looking movement.
- Dubois Parmlee – Created prosthetic with a suction socket, polycentric knee, and multi-articulated foot.
- Marcel Desoutter & Charles Desoutter – First aluminum prosthesis[6]
At the end of World War II, the NAS (National Academy of Sciences) began to advocate better research and development of prosthetics. Through government funding, a research and development program was developed within the Army, Navy, Air Force, and the Veterans Administration.
The following organizations have been created to help and inform the general publics about prosthetics:
- American Orthotics and Prosthetic Association, American Board for Certification in Prosthetics and Orthotics, American Academy of Orthotics and Prosthetics – These three groups work together to take responsibility for the academic side of orthotics and prosthetics and provide certification of individuals and facilities working with orthotics and prosthetics.
- The International Society for Prosthetics and Orthotics – Founded in 1970 and headquartered in Copenhagen, this association helps with the progression in research and clinical practice worldwide. They hold an international conference every three years and publish their own technical journal.
- Association of Children’s Orthotic-Prosthetic Clinics – The organization was started in 1950s to advocate research and development of children’s prosthetics. They meet annually and have their own publication.
- Amputee Coalition of America – The organization was created in 1990 to improve the lives of amputees. Advocate the improvement of amputee lifestyle through education and also have their own publication, inMotion.
Lower extremity prosthetics
Lower extremity prosthetics describes artificially replaced limbs located at the hip level or lower. The two main subcategories of lower extremity prosthetic devices are 1.trans-tibial (any amputation transecting the tibia bone or a congenital anomaly resulting in a tibial deficiency) and 2.trans-femoral (any amputation transecting the femur bone or a congenital anomaly resulting in a femural deficiency). In the prosthetic industry a trans-tibial prosthetic leg is often referred to as a "BK" or below the knee prosthesis while the trans-femoral prosthetic leg is often referred to as an "AK" or above the knee prosthesis.
Other, less prevalent lower extremity cases include the following:
- Hip disarticulations - This usually refers to when an amputee or congenitally challenged patient has either an amputation or anomaly at or in close proximity to the hip joint.
- Knee disarticulations - This usually refers to an amputation through the knee disarticulating the femur from the tibia.
- Symes - This is an ankle disarticulation while preserving the heel pad.
Lower extremity modern history
Socket technology for lower extremity limbs saw a revolution of advancement during the 1980s when Sabolich Prosthetics, John Sabolich C.P.O., invented the Contoured Adducted Trochanteric-Controlled Alignment Method (CATCAM) socket, later to evolve into the Sabolich Socket. He followed the steps of science led by Ivan Long and Ossur Christensen as they developed alternatives to the scientifically developed quadrilateral socket, which followed the open ended plug socket created from wood. The advancement was due to the difference in the socket to patient contact model. Prior, sockets were made in the shape of a square bucket with no specialized containment for either the patient's bony prominences' or muscular tissue. Sabolich's design held the patient's limb like a glove, locking it into place and distributing the weight evenly over the existing limb as well as the bone structure of the patient. This was the first instance of ischial containment and led to an extreme advancement in patient accomplishment. Because of Sabolich's dedication to research and development in lower extremity prosthetics, Sabolich Prosthetics saw the first above the knee prosthetic patients walk and run step over step with both one leg and two legs missing, walking down stairs, suction sockets, modern plastic and bio elastic sockets, sense of feel technology, and numerous other inventions in the prosthetic field. Oterhs who contributed to socket developemt include Tim Staats, Chris Hoyt, Frank Gottschalk(who undermined in a scientific article the efficacy of the CAT-CAM socket- indicating the surgical procedure done by the amputation surgeon was most importat to prepare the amputee for good use of a prosthesis of any type socket design.
The first microprocessor-controlled prosthetic knees became available in the early 1990s. The Intelligent Prosthesis was first commercially available microprocessor controlled prosthetic knee. It was released by Chas. A. Blatchford & Sons, Ltd., of Great Britain, in 1993 and made walking with the prosthesis feel and look more natural.[7] An improved version was released in 1995 by the name Intelligent Prosthesis Plus. Blatchford released another prosthesis, the Adaptive Prosthesis, in 1998. The Adaptive Prosthesis utilized hydraulic controls, pneumatic controls, and a microprocessor to provide the amputee with a gait that was more responsive to changes in walking speed. Little evidence exists to support the tremendous financial burden to third parties who pay essentially the cost of a cheap home for the microprocessor knee, ischial containment socket, flexfoot leg. Some amputees from the Iraq and Afganistan conflicts have returned to service with sophisticated prostheses. Cost analysis reveals that a sophisticated above knee prosthesis will be in the neighborhood of $1 million in 45 years, given only annual cost of living adjustments. [8]
C-Leg knee prosthesis
 Two different models of the C-Leg prosthesis
Two different models of the C-Leg prosthesisThe Otto Bock Orthopedic Industry introduced the C-Leg during the World Congress on Orthopedics in Nuremberg in 1997. The company began marketing the C-Leg in the United States in 1999.[9] Other microprocessor-controlled knee prostheses include Ossur's Rheo Knee, released in 2005, the Power Knee by Ossur, introduced in 2006, the Plié Knee from Freedom Innovations[10] and DAW Industries’ Self Learning Knee (SLK).[11]
The idea was originally developed by Kelly James, a Canadian engineer, at the University of Alberta.[12] The C-Leg uses hydraulic cylinders to control the flexing of the knee. Sensors send signals to the microprocessor that analyzes these signals, and communicates what resistance the hydraulic cylinders should supply. C-Leg is an abbreviation of 3C100, the model number of the original prosthesis, but has continued to be applied to all Otto Bock microprocessor-controlled knee prostheses. The C-Leg functions through various technological devices incorporated into the components of the prosthesis. The C-Leg uses a knee-angle sensor to measure the angular position and angular velocity of the flexing joint. Measurements are taken up to fifty times a second. The knee-angle sensor is located directly at the axis of rotation of the knee.[13]
Moment sensors are located in the tube adapter at the base of the C-Leg. These moment sensors use multiple strain gauges to determine where the force is being applied to the knee, from the foot, and the magnitude of that force.[13]
The C-Leg controls the resistance to rotation and extension of the knee using a hydraulic cylinder. Small valves control the amount of hydraulic fluid that can pass into and out of the cylinder, thus regulating the extension and compression of a piston connected to the upper section of the knee.[8] The microprocessor receives signals from its sensors to determine the type of motion being employed by the amputee. The microprocessor then signals the hydraulic cylinder to act accordingly. The microprocessor also records information concerning the motion of the amputee that can be downloaded onto a computer and analyzed. This information allows the user to make better use of the prosthetic.[13]
The C-Leg is powered by a lithium-ion battery housed inside the prosthesis below the knee joint. (cell is actually located within the axis of the joint) On a full charge, the C-leg can operate for up to 45 hours, depending on the intensity of use. A charging port located on the front of the knee joint can be connected to a charging cable plugged directly into a standard outlet.[14] A "pigtail" charging port adapter permits the relocation of the charging port to a location more accessible when the prosthesis has a cosmetic cover applied. The charger cord has lights that allow the user to observe the level of charge when connected to the knee. A 12 volt car charger adapter can also be purchased.
The C-Leg provides certain advantages over conventional mechanical knee prostheses. It provides an approximation to an amputee’s natural gait. The C-Leg allows amputees to walk at near walking speed. Variations in speed are also possible and are taken into account by sensors and communicated to the microprocessor, which adjusts to these changes accordingly. It also enables the amputees to walk down stairs with a step-over-step approach, rather than the one step at a time approach used with mechanical knees.[9] The C-Leg’s ability to respond to sensor readings can help amputees recover from stumbles without the knee buckling.[15] However, the C-Leg has some significant drawbacks that impair its use. The C-Leg is susceptible to water damage and thus great care must be taken to ensure that the prosthesis remains dry. Otto Bock recommends that each amputee use the C-Leg for up to two months before the system can fully become accustomed to the individual’s unique gait. Becoming accustomed to the C-Leg is especially difficult when walking downhill, and amputees should seek help while becoming familiar with the system to avoid injury.[9]
A wide range of amputees can make use of the C-Leg; however, some people are more suited to this prosthesis than others. The C-Leg is designed for use on people who have undergone transfemoral amputation, or amputation above the knee. The C-Leg can be used by amputees with either single or bilateral limb amputations. In the case of bilateral amputations, the application of C-Legs must be closely monitored. In some cases, those who have undergone hip disarticulation amputations can be candidates for a C-Leg.[16] The prosthesis is recommended for amputees that vary their walking speeds and can reach over 3 miles per hour; however, it cannot be used for running. The C-Leg is practical for upwards of 3 miles daily, and can be used on uneven ground, slopes, or stairs. Active amputees, such as bikers and rollerbladers may find the C-Leg suited to their needs.
Certain physical requirements must be met for C-Leg use. The amputee must have satisfactory cardiovascular and pulmonary health. The balance and strength of the amputee must be sufficient to take strides while using prosthesis. The C-Leg is designed to support amputees weighing up to 275 pounds.[16]
Robotic prostheses
Further information: Robotics#TouchIn order for a robotic prosthetic limb to work, it must have several components to integrate it into the body's function: Biosensors detect signals from the user's nervous or muscular systems. It then relays this information to a controller located inside the device, and processes feedback from the limb and actuator (e.g., position, force) and sends it to the controller. Examples include wires that detect electrical activity on the skin, needle electrodes implanted in muscle, or solid-state electrode arrays with nerves growing through them. One type of these biosensors are employed in myoelectric prosthesis.
Mechanical sensors process aspects affecting the device (e.g., limb position, applied force, load) and relay this information to the biosensor or controller. Examples include force meters and accelerometers.
The controller is connected to the user's nerve and muscular systems and the device itself. It sends intention commands from the user to the actuators of the device, and interprets feedback from the mechanical and biosensors to the user. The controller is also responsible for the monitoring and control of the movements of the device.
An actuator mimics the actions of a muscle in producing force and movement. Examples include a motor that aids or replaces original muscle tissue.
Cosmesis
Cosmetic prosthesis has long been used to disguise injuries and disfigurements. With advances in modern technology, cosmesis, the creation of lifelike limbs made from silicone or PVC has been made possible. Such prosthetics, such as artificial hands, can now be made to mimic the appearance of real hands, complete with freckles, veins, hair, fingerprints and even tattoos. Custom-made cosmeses are generally more expensive (costing thousands of US dollars, depending on the level of detail), while standard cosmeses come ready-made in various sizes, although they are often not as realistic as their custom-made counterparts. Another option is the custom-made silicone cover, which can be made to match a person's skin tone but not details such as freckles or wrinkles. Cosmeses are attached to the body in any number of ways, using an adhesive, suction, form-fitting, stretchable skin, or a skin sleeve.
Cognition
Main article: NeuroprostheticsUnlike neuromotor prostheses, neurocognitive prostheses would sense or modulate neural function in order to physically reconstitute or augment cognitive processes such as executive function, attention, language, and memory. No neurocognitive prostheses are currently available but the development of implantable neurocognitive brain-computer interfaces has been proposed to help treat conditions such as stroke, traumatic brain injury, cerebral palsy, autism, and Alzheimer's disease.[17] The recent field of Assistive Technology for Cognition concerns the development of technologies to augment human cognition. Scheduling devices such as Neuropage remind users with memory impairments when to perform certain activities, such as visiting the doctor. Micro-prompting devices such as PEAT, AbleLink and Guide have been used to aid users with memory and executive function problems perform activities of daily living.
Prosthetic enhancement
Further information: Powered exoskeleton#ResearchIn addition to the standard artificial limb for everyday use, many amputees or congenital patients have special limbs and devices to aid in the participation of sports and recreational activities.
Within science fiction, and, more recently, within the scientific community, there has been consideration given to using advanced prostheses to replace healthy body parts with artificial mechanisms and systems to improve function. The morality and desirability of such technologies are being debated. Body parts such as legs, arms, hands, feet, and others can be replaced.
The first experiment with a healthy individual appears to have been that by the British scientist Kevin Warwick. In 2002, an implant was interfaced directly into Warwick's nervous system. The electrode array, which contained around a hundred electrodes, was placed in the median nerve. The signals produced were detailed enough that a robot arm was able to mimic the actions of Warwick's own arm and provide a form of touch feedback again via the implant.[18]
 In 2008, Oscar Pistorius was briefly ruled ineligible for the 2008 Summer Olympics due to an alleged mechanical advantage over runners who have ankles.
In 2008, Oscar Pistorius was briefly ruled ineligible for the 2008 Summer Olympics due to an alleged mechanical advantage over runners who have ankles.In early 2008, Oscar Pistorius, the "Blade Runner" of South Africa, was briefly ruled ineligible to compete in the 2008 Summer Olympics because his prosthetic limbs were said to give him an unfair advantage over runners who had ankles. One researcher found that his limbs used twenty-five percent less energy than those of an able-bodied runner moving at the same speed. This ruling was overturned on appeal, with the appellate court stating that the overall set of advantages and disadvantages of Pistorius' limbs had not been considered. Pistorius did not qualify for the South African team for the Olympics, but went on to sweep the 2008 Summer Paralympics, and has been ruled eligible to qualify for any future Olympics. He qualified for the 2011 World Championship in South Korea and reached the semifinal where he ended last timewise, he was 14th in the first round, his personal best at 400m would have given him 5th place in the finals.
Dean Kamen's company DEKA developed the "Luke arm", an advanced prosthesis currently under trials as of 2008.[19]
Types
 A United States Marine with bilateral prosthetic legs leads a formation run.
A United States Marine with bilateral prosthetic legs leads a formation run.There are four main types of artificial limbs. These include the transtibial, transfemoral, transradial, and transhumeral prostheses. The type of prosthesis depends on what part of the limb is missing.
Transtibial prosthesis
A transtibial prosthesis is an artificial limb that replaces a leg missing below the knee. Transtibial amputees are usually able to regain normal movement more readily than someone with a transfemoral amputation, due in large part to retaining the knee, which allows for easier movement. In the prosthetic industry a trans-tibial prosthetic leg is often referred to as a "BK" or below the knee prosthesis.
Transfemoral prosthesis
A transfemoral prosthesis is an artificial limb that replaces a leg missing above the knee. Transfemoral amputees can have a very difficult time regaining normal movement. In general, a transfemoral amputee must use approximately 80% more energy to walk than a person with two whole legs.[20] This is due to the complexities in movement associated with the knee. In newer and more improved designs, after employing hydraulics, carbon fibre, mechanical linkages, motors, computer microprocessors, and innovative combinations of these technologies to give more control to the user. In the prosthetic industry a trans-femoral prosthetic leg is often referred to as an "AK" or above the knee prosthesis.[21]
Transradial prosthesis
A transradial prosthesis is an artificial limb that replaces an arm missing below the elbow. Two main types of prosthetics are available. Cable operated limbs work by attaching a harness and cable around the opposite shoulder of the damaged arm. The other form of prosthetics available are myoelectric arms. These work by sensing, via electrodes, when the muscles in the upper arm moves, causing an artificial hand to open or close. In the prosthetic industry a trans-radial prosthetic arm is often referred to as a "BE" or below elbow prosthesis.
Transhumeral prosthesis
A transhumeral prosthesis is an artificial limb that replaces an arm missing above the elbow. Transhumeral amputees experience some of the same problems as transfemoral amputees, due to the similar complexities associated with the movement of the elbow. This makes mimicking the correct motion with an artificial limb very difficult. In the prosthetic industry a trans-humeral prosthesis is often referred to as a "AE" or above the elbow prothesis.
Current technology/manufacturing
 Knee prosthesis manufactured using WorkNC Computer Aided Manufacturing software.
Knee prosthesis manufactured using WorkNC Computer Aided Manufacturing software.In recent years there have been significant advancements in artificial limbs. New plastics and other materials, such as carbon fiber, have allowed artificial limbs to be stronger and lighter, limiting the amount of extra energy necessary to operate the limb. This is especially important for transfemoral amputees. Additional materials have allowed artificial limbs to look much more realistic, which is important to transradial and transhumeral amputees because they are more likely to have the artificial limb exposed.[22]
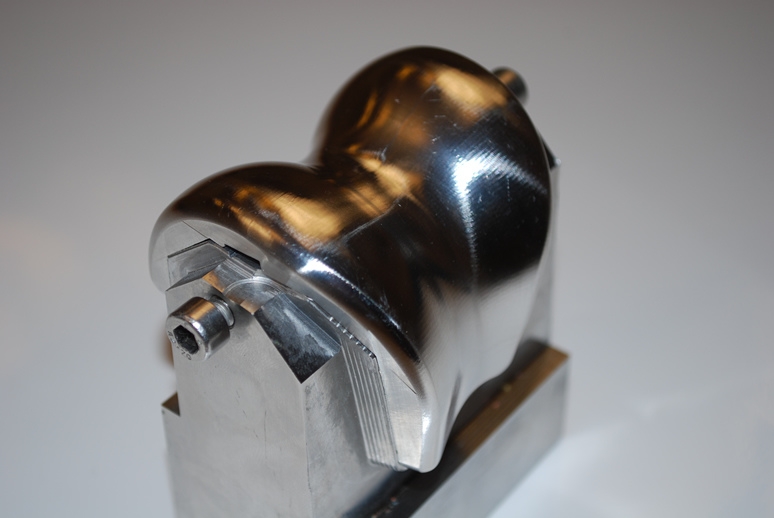
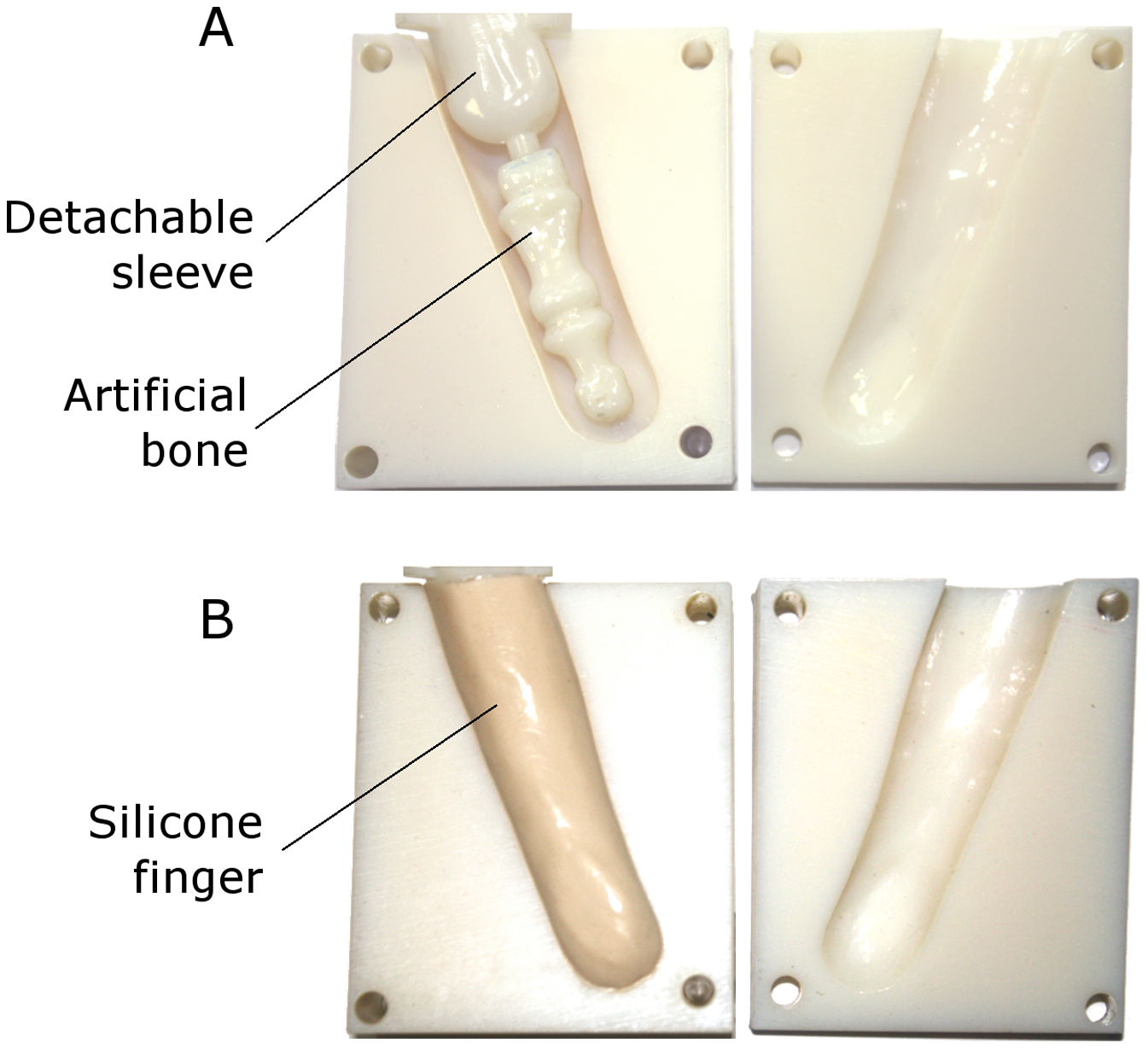
 Manufacturing a prosthetic finger.
Manufacturing a prosthetic finger.In addition to new materials, the use of electronics has become very common in artificial limbs. Myoelectric limbs, which control the limbs by converting muscle movements to electrical signals, have become much more common than cable operated limbs. Myoelectric signals are picked up by electrodes, the signal gets integrated and once it exceeds a certain threshold, the prosthetic limb control signal is triggered which is why inherently, all myoelectric controls lag. Conversely, cable control is immediate and physical, and through that offers a certain degree of direct force feedback that myoelectric control does not. Computers are also used extensively in the manufacturing of limbs. Computer Aided Design and Computer Aided Manufacturing are often used to assist in the design and manufacture of artificial limbs.[22]
Most modern artificial limbs are attached to the stump of the amputee by belts and cuffs or by suction. The stump either directly fits into a socket on the prosthetic, or - more commonly today - a liner is used that then is fixed to the socket either by vacuum (suction sockets) or a pin lock. Liners are soft and by that, they can create a far better suction fit than hard sockets. Silicone liners can be obtained in standard sizes, mostly with a circular (round) cross section, but for any other stump shape, custom liners can be made. The socket is custom made to fit the residual limb and to distribute the forces of the artificial limb across the area of the stump (rather than just one small spot), which helps reduce wear on the stump. The custom socket is created by taking a plaster cast of the stump or, more commonly today, of the liner worn over the stump, and then making a mold from the plaster cast. Newer methods include laser guided measuring which can be input directly to a computer allowing for a more sophisticated design.
One problems with the stump and socket attachment is that a bad fit will reduce the area of contact between the stump and socket or liner, and increase pockets between stump skin and socket or liner. Pressure then is higher, which can be painful. Air pockets can allow sweat to accumulate that can soften the skin. Ultimately, this is a frequent cause for itchy skin rashes. Further down the road, it can cause breakdown of the skin.[20]
Artificial limbs are typically manufactured using the following steps:[22]
- Measurement of the stump
- Measurement of the body to determine the size required for the artificial limb
- Fitting of a silicone liner
- Creation of a model of the liner worn over the stump
- Formation of thermoplastic sheet around the model – This is then used to test the fit of the prosthetic
- Formation of permanent socket
- Formation of plastic parts of the artificial limb – Different methods are used, including vacuum forming and injection molding
- Creation of metal parts of the artificial limb using die casting
- Assembly of entire limb
Body-powered arms
Current body powered arms contain sockets that are built from hard epoxy or carbon fiber. Wrist units are either screw-on connectors featuring the UNF 1/2-20 thread (USA) or quick release connector, of which there are different models. Terminal devices contain a range of hooks, hands or other devices. Hands require a large activation force, which is often uncomfortable. Hooks require a much lower force.[23] Hosmer and Otto Bock are major commercial hook providers. Mechanical hands are sold by Hosmer and Otto Bock as well; the Becker Hand is still manufactured by the Becker family. Prosthetic hands may be fitted with standard stock or custom made cosmetic looking silicone gloves. But regular work gloves may be worn as well. Other terminal devices include the V2P Prehensor, a versatile robust gripper that allows customers to modify aspects of it, Texas Assist Devices (with a whole assortment of tools) and TRS that offers a range of terminal devices for sports. Cable harnesses can be built using aircraft steel cables, ball hinges and self lubricating cable sheaths. Current high tech allows body powered arms to weigh around half to only a third of the weight that a myoelectric arm has.
 Actor Owen Wilson gripping the myoelectric prosthetic arm of a United States Marine
Actor Owen Wilson gripping the myoelectric prosthetic arm of a United States MarineMyoelectric
A myoelectric prosthesis uses electromyography signals or potentials from voluntarily contracted muscles within a person's residual limb on the surface of the skin to control the movements of the prosthesis, such as elbow flexion/extension, wrist supination/pronation (rotation) or hand opening/closing of the fingers. A prosthesis of this type utilizes the residual neuro-muscular system of the human body to control the functions of an electric powered prosthetic hand, wrist or elbow. This is as opposed to an electric switch prosthesis, which requires straps and/or cables actuated by body movements to actuate or operate switches that control the movements of a prosthesis or one that is totally mechanical. It is not clear whether those few prostheses that provide feedback signals to those muscles are also myoelectric in nature. It has a self suspending socket with pick up electrodes placed over flexors and extensors for the movement of flexion and extension respectively.
The first commercial myoelectric arm was developed in 1964 by the Central Prosthetic Research Institute of the USSR, and distributed by the Hangar Limb Factory of the UK.[24][25]
Robotic limbs
Main article: Neural prostheticsFurther information: Robotics#TouchAdvancements in the processors used in myoelectric arms has allowed for artificial limbs to make gains in fine tuned control of the prosthetic. The Boston Digital Arm is a recent artificial limb that has taken advantage of these more advanced processors. The arm allows movement in five axes and allows the arm to be programmed for a more customized feel. Recently the i-Limb hand, invented in Edinburgh, Scotland, by David Gow has become the first commercially available hand prosthesis with five individually powered digits. The hand also possesses a manually rotatable thumb which is operated passively by the user and allows the hand to grip in precision, power and key grip modes.[26] Raymond Edwards, Limbless Association Acting CEO, was the first amputee to be fitted with the i-LIMB by the National Health Service in the UK.[27] The hand, manufactured by "Touch Bionics"[28] of Scotland (a Livingston company), went on sale on 18 July 2007 in Britain.[29] It was named alongside the Large Hadron Collider in Time magazine's top fifty innovations.[30] Another robotic hand is the RSLSteeper bebionic [31]
Another neural prosthetic is Johns Hopkins University Applied Physics Laboratory Proto 1. Besides the Proto 1, the university also finished the Proto 2 in 2010.[32]
Robotic legs exist too: the Argo Medical Technologies ReWalk is an example or a recent robotic leg, targeted to replace the wheelchair. It is marketed as a "robotic pants".[33]
Targeted muscle reinnervation (TMR) is a technique in which motor nerves which previously controlled muscles on an amputated limb are surgically rerouted such that they reinnervate a small region of a large, intact muscle, such as the pectoralis major. As a result, when a patient thinks about moving the thumb of his missing hand, a small area of muscle on his chest will contract instead. By placing sensors over the reinervated muscle, these contractions can be made to control movement of an appropriate part of the robotic prosthesis.[34][35]
An emerging variant of this technique is called targeted sensory reinnervation (TSR). This procedure is similar to TMR, except that sensory nerves are surgically rerouted to skin on the chest, rather than motor nerves rerouted to muscle. The patient then feels any sensory stimulus on that area of the chest, such as pressure or temperature, as if it were occurring on the area of the amputated limb which the nerve originally innervated. In the future, artificial limbs could be built with sensors on fingertips or other important areas. When a stimulus, such as pressure or temperature, activated these sensors, an electrical signal would be sent to an actuator, which would produce a similar stimulus on the "rewired" area of chest skin. The user would then feel that stimulus as if it were occurring on an appropriate part of the artificial limb.[34]
Recently, robotic limbs have improved in their ability to take signals from the human brain and translate those signals into motion in the artificial limb. DARPA, the Pentagon’s research division, is working to make even more advancements in this area. Their desire is to create an artificial limb that ties directly into the nervous system.[36]
Direct bone attachment / osseointegration
Main article: OsseointegrationOsseointegration is a new method of attaching the artificial limb to the body. This method is also sometimes referred to as exoprosthesis (attaching an artificial limb to the bone), or endo-exoprosthesis.
The stump and socket method can cause significant pain in the amputee, which is why the direct bone attachment has been explored extensively. The method works by inserting a titanium bolt into the bone at the end of the stump. After several months the bone attaches itself to the titanium bolt and an abutment is attached to the titanium bolt. The abutment extends out of the stump and the artificial limb is then attached to the abutment. Some of the benefits of this method include the following:
- Better muscle control of the prosthetic.
- The ability to wear the prosthetic for an extended period of time; with the stump and socket method this is not possible.
- The ability for transfemoral amputees to drive a car.
The main disadvantage of this method is that amputees with the direct bone attachment cannot have large impacts on the limb, such as those experienced during jogging, because of the potential for the bone to break.[20]
Cost
Transradial and transtibial prostheses typically cost between US $6,000 and $8,000. Transfemoral and transhumeral prosthetics cost approximately twice as much with a range of $10,000 to $15,000 and can sometimes reach costs of $35,000. The cost of an artificial limb does recur because artificial limbs are usually replaced every 3–4 years due to wear and tear. In addition, if the socket has fit issues, the socket must be replaced within several months. If height is an issue components can be changed, such as the pylons.[37] [38]
Low cost above knee prostheses often provide only basic structural support with limited function. This function is often achieved with crude, non-articulating, unstable, or manually locking knee joints. A limited number of organizations, such as the International Committee of the Red Cross (ICRC), create devices for developing countries. Their device which is manufactured by CR Equipments is a single-axis, manually operated locking polymer prosthetic knee joint.[39]
Table. List of knee joint technologies based on the literature review. [40]
Name of technology (country of origin) Brief description Highest level of evidence
ICRC knee (Switzerland) Single-axis with manual lock Independent field ATLAS knee (UK) Weigh-activated friction Independent field POF/OTRC knee (US) Single-axis with ext. assist Field DAV/Seattle knee (US) Compliant polycentric Field LEGS M1 knee (US) Four-bar Field JaipurKnee (US) Four-bar Field LCKnee (Canada) Single-axis with automatic lock Field None provided (Nepal) Single-axis Field None provided (New Zealand) Roto-molded single-axis Field None provided (India) Six-bar with squatting Technical development Friction knee (US) Weigh-activated friction Technical development Wedgelock knee (Australia) Weigh-activated friction Technical development SATHI friction knee (India) Weigh-activated friction Limited data available  Low Cost Above Knee Prosthetic Limbs: ICRC Knee (left) and LC Knee (right)
Low Cost Above Knee Prosthetic Limbs: ICRC Knee (left) and LC Knee (right)There is currently an open Prosthetics design forum known as the "Open Prosthetics Project". The group employs collaborators and volunteers to advance Prosthetics technology while attempting to lower the costs of these necessary devices.[41]
A plan for a low-cost artificial leg, designed by Sébastien Dubois, was featured at the 2007 International Design Exhibition and award show in Copenhagen, Denmark, where it won the Index: Award. It would be able to create an energy-return prosthetic leg for US $8.00, composed primarily of fiberglass.[42]
Prior to the 1980s, foot prostheses merely restored basic walking capabilities. These early devices can be characterized by a simple artificial attachment connecting one's residual limb to the ground.
The introduction of the Seattle Foot (Seattle Limb Systems) in 1981 revolutionized the field, bringing the concept of an Energy Storing Prosthetic Foot (ESPF) to the fore. Other companies soon followed suit, and before long, there were multiple models of energy storing prostheses on the market. Each model utilized some variation of a compressible heel. The heel is compressed during initial ground contact, storing energy which is then returned during the latter phase of ground contact to help propel the body forward.
Since then, the foot prosthetics industry has been dominated by steady, small improvements in performance, comfort, and marketability. Jaipur Foot, an artificial limb from Jaipur, India, costs about US$ 40.
Design considerations
There are multiple factors to consider when designing a transtibial prosthesis. Manufacturers must make choices about their priorities regarding these factors.
Performance
Nonetheless, there are certain elements of foot mechanics that are invaluable for the athlete, and these are the focus of today’s high-tech prosthetics companies:
- Energy storage and return – storage of energy acquired through ground contact and utilization of that stored energy for propulsion
- Energy absorption – minimizing the effect of high impact on the musculoskeletal system
- Ground compliance – stability independent of terrain type and angle
- Rotation – ease of changing direction
- Weight – maximizing comfort, balance and speed
- Suspension - how the socket will join and fit to the limb≈
Other
The buyer is also concerned with numerous other factors:
- Cosmetics
- Cost
- Ease of use
- Size availability
References
- ^ "A Brief Review of the History of Amputations and Prostheses Earl E. Vanderwerker, Jr., M.D. JACPOC 1976 Vol 15, Num 5". http://www.acpoc.org/library/1976_05_015.asp.
- ^ http://www.uh.edu/engines/epi1705.htm
- ^ "Bronze single crown-like prosthetic restorations of teeth from the Late Roman period = Des restaurations par prothèses identiques à des couronnes en simple bronze de dents pendant la fin de la période romaine". Cat.inist.fr. http://cat.inist.fr/?aModele=afficheN&cpsidt=1557911. Retrieved 2009-11-03.
- ^ "The Iron Hand of the Goetz von Berlichingen". Karlofgermany.com. http://www.karlofgermany.com/Goetz.htm. Retrieved 2009-11-03.
- ^ "Bryce, Geore, ''A Short History of the Canadian People''". Archive.org. http://www.archive.org/details/shorthistoryofca00bryc. Retrieved 2009-11-03.
- ^ "A Brief History of Prosthetics". inMotion: A Brief History of Prosthetics. November/December 2007. http://www.amputee-coalition.org/inmotion/nov_dec_07/history_prosthetics.html. Retrieved 23 November 2010.
- ^ “History of Prosthetics”, Blatchford & Sons, Ltd. Retrieved 16 March 2008.
- ^ a b Pike, Alvin (May/June 1999). “The New High Tech Prostheses”. InMotion Magazine 9 (3)
- ^ a b c Martin, Craig W. (November 2003) “Otto Bock C-leg: A review of its effectiveness”. WCB Evidence Based Group
- ^ "Retrieved 14 April 2009". Freedom-innovations.com. http://www.freedom-innovations.com/knees/index.html. Retrieved 2010-10-03.
- ^ “The SLK, The Self-Learning Knee”, DAW Industries. Retrieved 16 March 2008.
- ^ Marriott, Michel (2005-06-20). "Titanium and Sensors Replace Ahab's Peg Leg". New York Times. http://www.nytimes.com/2005/06/20/health/menshealth/20marrbox.html. Retrieved 2008-10-30.
- ^ a b c “Otto Bock Microprocessor Knees”, Otto Bock. Retrieved 16 March 2008.
- ^ “FAQ: Questions and Answers on the C-Leg.”, Otto Bock. Retrieved 1 April 2008.
- ^ “High-Tech for more Quality of Life”, Otto Bock. Retrieved 16 March 2008.
- ^ a b “Clinical and Technical Information”[dead link], Otto Bock. Retrieved 16 March 2008.
- ^ Serruya MD, Kahana MJ (2008). "Techniques and devices to restore cognition". Behav Brain Res 192 (2): 149. doi:10.1016/j.bbr.2008.04.007. PMID 18539345.
- ^ Warwick,K, Gasson,M, Hutt,B, Goodhew,I, Kyberd,P, Andrews,B, Teddy,P and Shad,A. “The Application of Implant Technology for Cybernetic Systems”, Archives of Neurology, 60(10), pp1369-1373, 2003
- ^ "IEEE Spectrum: Dean Kamen's "Luke Arm" Prosthesis Readies for Clinical Trials". http://spectrum.ieee.org/biomedical/bionics/dean-kamens-luke-arm-prosthesis-readies-for-clinical-trials.
- ^ a b c "Getting an Artificial Leg Up", Australian Broadcasting Corporation, 2000. Retrieved 11 February 2007.
- ^ Physics: A First Course. "Connections, designing a better prosthetic leg"
- ^ a b c "How artificial limb is made - Background, Raw materials, The manufacturing process of artificial limb, Physical therapy, Quality control". Madehow.com. 1988-04-04. http://www.madehow.com/Volume-1/Artificial-Limb.html. Retrieved 2010-10-03.
- ^ Smit G, Plettenburg DH (2010). "Efficiency of Voluntary Closing Hand and Hook Prostheses". Prosthetics and Orthotics International 34 (4): 411–427. http://poi.sagepub.com/content/34/4/411.abstract. Retrieved 2011-03-11.
- ^ Sherman, E. David (1964). "A Russian Bioeleciric-Controlled Prosthesis: Report of a Research Team from the Rehabilitation Institute of Montreal". Canadian Medical Association Journal 91 (24): 1268–1270. PMC 1927453. PMID 14226106. http://www.pubmedcentral.nih.gov/articlerender.fcgi?tool=pmcentrez&artid=1927453. Retrieved 2009-05-05.
- ^ Muzumdar, Ashok (2004). Powered Upper Limb Prostheses: Control, Implementation and Clinical Application. Springer. ISBN 9783540404064.
- ^ "Advanced Signal Processing Dramatically Improves Capability of Artificial Limbs"[dead link], SIGMO Technology, 2005. Retrieved 11 February 2007.
- ^ "Bionic hand wins top tech prize". BBC News. 9 June 2008. http://news.bbc.co.uk/1/hi/sci/tech/7443866.stm. Retrieved 25 April 2010.
- ^ "Touch Bionics". Touch Bionics. http://www.touchbionics.com/professionals.php?section=5. Retrieved 2010-10-03.
- ^ Highfield, Roger (31 May 2008). "Gripping stuff". The Daily Telegraph (London). http://www.telegraph.co.uk/motoring/2754644/Gripping-stuff.html. Retrieved 25 April 2010.
- ^ "Bionic hand makes top inventions list // Current". Current.com. 2008-11-06. http://current.com/items/89499345/bionic_hand_makes_top_inventions_list.htm. Retrieved 2010-10-03.
- ^ [www.rslsteeper.com/ RSLSteeper bebionic]
- ^ "Proto 1 and Proto 2". Ric.org. 2007-05-01. http://www.ric.org/aboutus/mediacenter/press/2007/o501.aspx. Retrieved 2010-10-03.
- ^ ReWalk robotic pants
- ^ a b Kuiken TA, Miller LA, Lipschutz RD, Lock BA, Stubblefield K, Marasco PD, Zhou P, Dumanian GA (February 3, 2007). "Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study". Lancet 369 (9559): 371–80. doi:10.1016/S0140-6736(07)60193-7. PMID 17276777.
- ^ "Blogs: TR Editors' blog: Patients Test an Advanced Prosthetic Arm". Technology Review. 2009-02-10. http://www.technologyreview.com/blog/editors/22730/. Retrieved 2010-10-03.
- ^ "Defense Sciences Office". Darpa.mil. http://www.darpa.mil/dso/solicitations/sn07-43.htm. Retrieved 2010-10-03.
- ^ "Cost of Prosthetics Stirs Debate", The Boston Globe, 5 July 2005. Retrieved 11 February 2007.
- ^ [8]
- ^ "ICRC: Trans-Femoral Prosthesis – Manufacturing Guidelines" (PDF). http://www.icrc.org/Web/eng/siteeng0.nsf/htmlall/p0868/$File/Eng-Transfemoral.pdf. Retrieved 2010-10-03.
- ^ ANDRYSEK, J., "Lower-limb prosthetic technologies in the developing world: A review of literature from 1994–2010" Prosthetics and Orthotics International, 2010; Early Online, 1–21.
- ^ Open Prosthetics Website
- ^ INDEX:2007 INDEX: AWARD[dead link]
External links
- Murdoch, George; A. Bennett Wilson, Jr. (1997). A Primer on Amputations and Artificial Limbs. United States of America: Charles C Thomas Publisher, Ltd.. pp. 3–31. ISBN 0-398-06801-1.
- ‘Biomechanics of running: from faulty movement patterns come injury.' Sports Injury Bulletin.
- Edelstein, J. E. Prosthetic feet. State of the Art. Physical Therapy 68(12) Dec 1988: 1874-1881.
- Gailey, Robert. The Biomechanics of Amputee Running. October 2002.
- Hafner, B. J., Sanders, J. E., Czerniecki, J. M., Ferguson , J. Transtibial energy-storage-and-return prosthetic devices: A review of energy concepts and a proposed nomenclature. Journal of Rehabilitation Research and Development Vol. 39, No. 1 Jan/Feb 2002: 1-11.
- National Amputee Centre — Information about artificial limbs
- Encyclopedia about Dental Implants in Russian
- How Stuff Works : Biomechatronics - An overview of the field of biomechatronics, of which prosthetics is a part
- Otto Bock
- American Academy of Orthotists and Prosthetists
- Chard Museum Display of James Gillingham's work on post WW1 artificial limbs.
- Myoelectric Prosthetics — Information about Myoelectric Prosthetics
- Myoelectric Prosthetesis — Children's Electronic Hand Assistance Project (CEHAP)
Categories:







Wikimedia Foundation. 2010.