- Dextre
-
This is about the space robot, for Dexter, see Dexter (disambiguation)
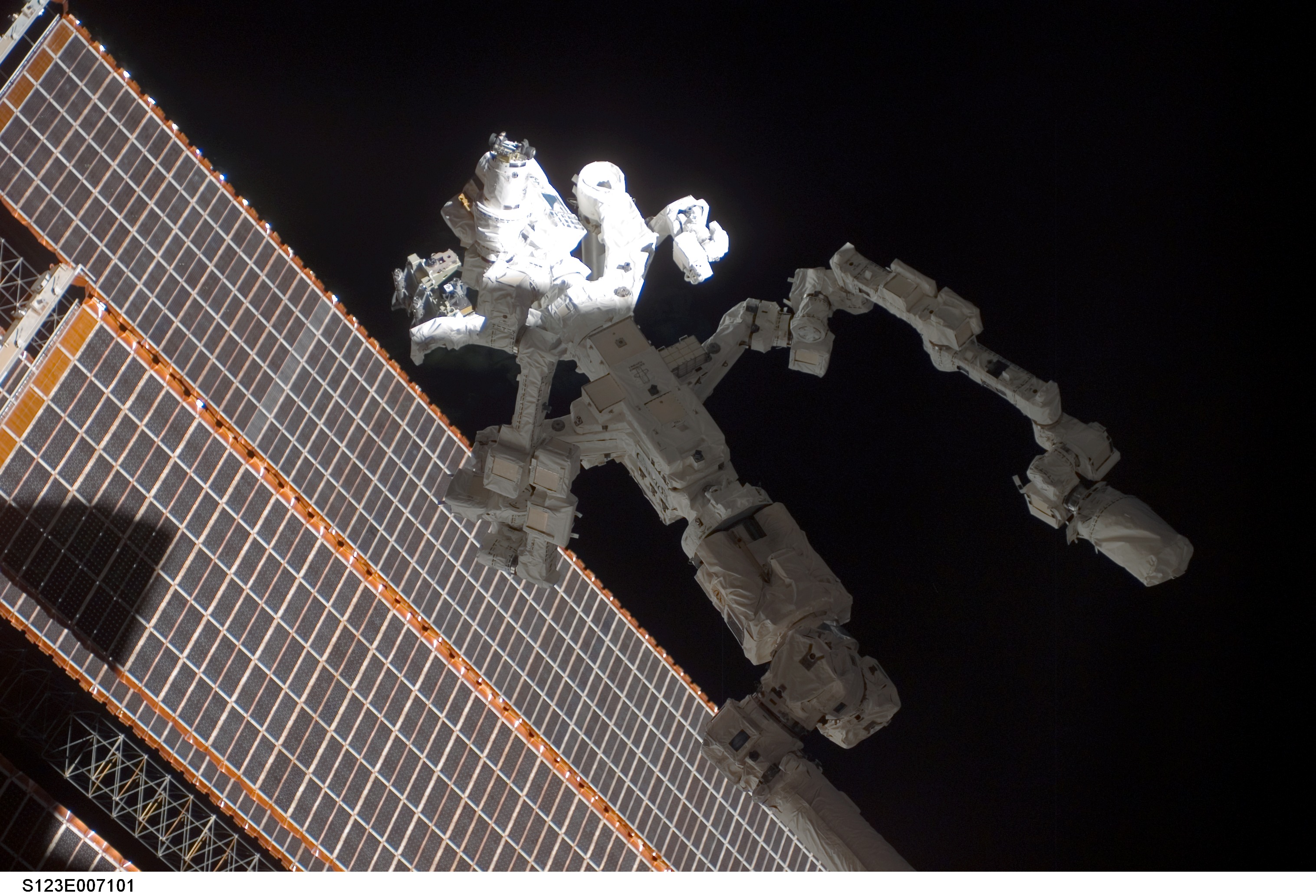
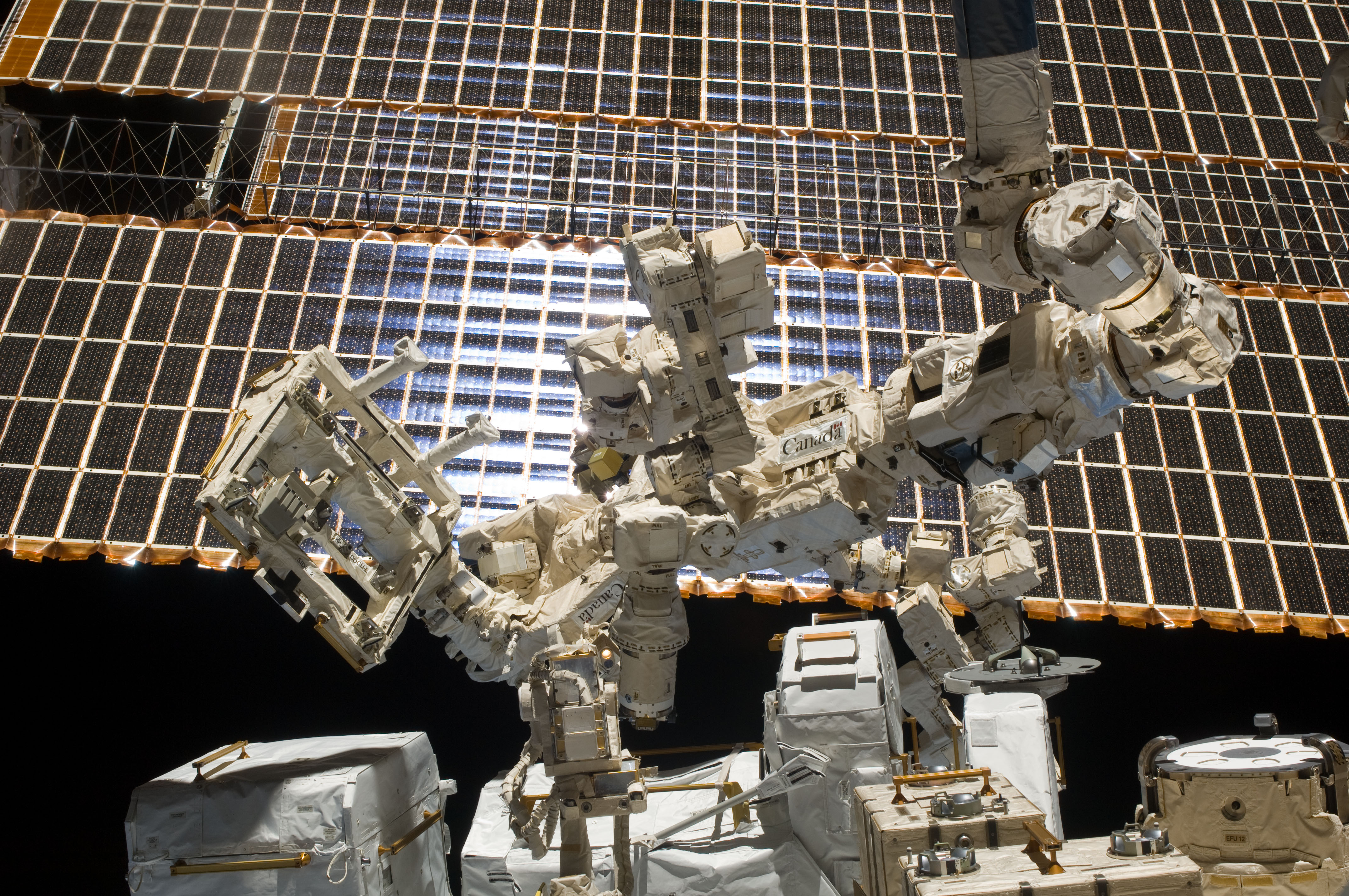
 Dextre on the end of Canadarm2
Dextre on the end of Canadarm2
 Dextre, as photographed by an Expedition 26 crew member
Dextre, as photographed by an Expedition 26 crew member Dextre, as photographed by an Expedition 27 crew member
Dextre, as photographed by an Expedition 27 crew memberDextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and extends the function of this system to replace some activities otherwise requiring spacewalks. It was launched March 11, 2008 on mission STS-123.
Dextre is part of Canada's contribution to the ISS and is named to represent its dexterous nature. It is sometimes also referred to as the Canada Hand, by analogy with the Canadarm and Canadarm2.[not verified in body] Dextre was designed and manufactured by MacDonald Dettwiler.[not verified in body]
In the early morning of February 4, 2011, Dextre completed its first official assignment which consisted in unpacking two pieces for Kounotori 2 while the on-board crew was sleeping.[1]
Contents
Structure
Dextre resembles a headless torso fitted with two extremely agile, 3.35 metres (11 ft) arms. The 3.5 meter long body pivots at the "waist". The body has a grapple fixture at one end that can be grasped by the larger Space Station Arm, Canadarm2 so that the SPDM can be positioned at the various Orbital Replacement Unit (ORU) worksites around the Space Station. The other end of the body has an end effector virtually identical to that of Canadarm2, so that the SPDM can be stored on Space Station grapple fixtures Unit/Tool Changeout Mechanism (OTCM). It has built-in grasping jaws, a retractable socket drive, a monochrome TV camera, lights, and an umbilical connector that can provide power, data, and video to/from a payload.
The lower body of Dextre has a pair of orientable colour TV cameras with lights, a platform for stowing ORUs, and a tool holster. The tool holster is equipped with three different tools used to perform various tasks.
Design and delivery
Dextre was designed and manufactured by MDA Space Missions as contracted by the Canadian Space Agency, which will oversee its future operations and the necessary training of station crews.
It completed all necessary testing and was delivered to the Kennedy Space Center (KSC) in Florida, in mid-June 2007. Once at KSC, it underwent flight verification testing followed by shuttle integration.
Installation
Dextre was launched to the ISS on March 11, 2008 aboard Endeavour on mission STS-123. It "woke up" and activated heaters needed for keeping its joints and electronics warm after receiving power from the space station's Canadarm2 on March 14. During the mission's second spacewalk on March 16, spacewalking astronauts attached the two 3.35 metres (11 ft) arms to the robot's main body and further prepared the machine for its handyman job on the station. After the spacewalk, crew members hooked Dextre back up to the station robotic arm to keep it warm and to allow NASA to perform tests to ensure all of Dextre's electronics were working properly. Later that day, the crew tested all of its joints and brakes.[2] Astronauts finished outfitting the robot during a third spacewalk on March 17, 2008.[3]
Additional usage
In early August 2004 NASA declared its intention to use Dextre (or a close copy of it) as the robotic component for the Hubble Space Telescope rescue mission. Months after awarding a contract to MDA Space Missions to provide an SPDM copy for the Hubble repair mission,[4] NASA then canceled the mission in favour of flying a Shuttle mission to perform the repairs/upgrades. NASA cited excessive risks and new-found confidence in the Space Shuttle external tank as reasons for the cancellation.
Dextre was the subject of an April Fool's Day joke article on April 1, 2008 on NASA's APOD website.[5]
References
- ^ Dextre Successfully Completes Its First Official Job, NASA, 2011-02-04
- ^ "Spacewalkers resort to banging, pry bar". Associated Press. March 16, 2008. Archived from the original on 2008-03-19. http://web.archive.org/web/20080319091646/http://edition.cnn.com/2008/TECH/space/03/16/space.shuttle.ap/index.html. Retrieved 2008-03-17.
- ^ Associated Press (2008-03-18). "Astronauts outfit robot with tool belt, cameras". CNN.com. Archived from the original on 2008-03-19. http://web.archive.org/web/20080319013550/http://edition.cnn.com/2008/TECH/space/03/17/space.shuttle.ap/index.html. Retrieved 2008-03-18.
- ^ MDA Space Missions official site
- ^ New Space Station Robot Asks to be Called "Dextre the Magnificent"
External links
- Canadian Space Agency page on Dextre
- Dextre: STS Mission 123 CTV News animation series showing Dextre in operation
Components of the International Space Station Overview Assembly · US Orbital Segment · Russian Orbital Segment · Expeditions · Spacewalks · ISS Program · Scientific Research · Major Incidents
Major components
in orbitZarya (Functional Cargo Block) · Zvezda (Service Module) · Unity (Node 1) · Harmony (Node 2) · Tranquility (Node 3) · Destiny (Laboratory) · Columbus (Laboratory) · Kibō (PM, ELM-PS, EF) · Quest (Airlock) · Pirs (Airlock / Docking Module) · Rassvet (MRM 1) · Poisk (MRM 2) · Leonardo (PMM) · Cupola · Integrated Truss Structure (ITS)Subsystems
in orbitFlight-ready hardware
with no launch planScheduled for launch
by ProtonProposed module Cancelled Support vehicles Current: Soyuz · Progress · Automated Transfer Vehicle (ATV) · H-II Transfer Vehicle (HTV)
Future: Dragon · Cygnus · Orion · Rus · CST-100
Former: Space ShuttleMission control centers  Book:International Space Station ·
Book:International Space Station ·  Category:International Space Station ·
Category:International Space Station ·  Portal:Spaceflight
Portal:Spaceflight← 2007 · Orbital launches in 2008 · 2009 → Thuraya 3 | TecSAR | Ekspress AM-33 | Progress M-63 | STS-122 (Columbus) | Thor 5 | Kizuna | Jules Verne | STS-123 (Kibō ELM-PS · Dextre · Spacelab MD002) | USA-200 | AMC-14 | USA-201 | DirecTV-11 | SAR-Lupe 4 | Soyuz TMA-12 | ICO G1 | C/NOFS | Vinasat-1 · Star One C2 | Tianlian I-01 | GIOVE-B | Cartosat-2A · TWSAT · CanX-2 · CUTE-1.7+APD II · Delfi-C3 · AAUSAT-II · Compass-1 · SEEDS-2 · CanX-6 · Rubin-8 | Amos-3 | Progress M-64 | Galaxy 18 | Kosmos 2437 · Kosmos 2438 · Kosmos 2439 · Yubileiny | Feng Yun 3A | STS-124 (Kibō PM) | Chinasat-9 | Fermi | Skynet 5C · Turksat 3A | Orbcomm FM29 · Orbcomm FM37 · Orbcomm FM38 · Orbcomm FM39 · Orbcomm FM40 · Orbcomm FM41 | Jason-2 | Kosmos 2440 | Badr-6 · ProtoStar 1 | EchoStar XI | SAR-Lupe 5 | Kosmos 2441 | Trailblazer · NanoSail-D · PRESat · Explorers | Superbird-C2 · AMC-21 | Omid | Inmarsat-4 F3 | Tachys · Mati · Choma · Choros · Trochia | Huan Jing 1A · Huan Jing 1B | GeoEye-1 | Progress M-65 | Nimiq-4 | Galaxy 19 | Kosmos 2442 · Kosmos 2243 · Kosmos 2444 | Shenzhou 7 (Ban Xing) | RatSat | THEOS | Soyuz TMA-13 | IBEX | Chandrayaan-1 (MIP) | Shijian 6E · Shijian 6F | COSMO-3 | Venesat-1 | Chuang Xin 1B · Shiyan Weixing 3 | Astra 1M | Kosmos 2445 | STS-126 (Leonardo MPLM · PSSC-1) | Progress M-01M | Yaogan 4 | Kosmos 2446 | Yaogan 5 | Hot Bird 9 · Eutelsat W2M | Feng Yun 2E | Kosmos 2447 · Kosmos 2448 · Kosmos 2449Payloads are separated by bullets ( · ), launches by pipes ( | ). Manned flights are indicated in bold text. Uncatalogued launch failures are listed in italics. Payloads deployed from other spacecraft are denoted in brackets. Robotics (outline) Main articles Outline of robotics · Glossary of robotics · Index of robotics articles · History of robots · Robotics worldwide · Robot Hall of Fame · Roboethics · Robotic laws · Human-robot interaction · AI Competitions · Future of roboticsRobots Humanoids · Androids · Biomorphic · Hexapods · Industrial · Articulated · Domestic · Entertainment · Military · Medical · Service · Disability · Agricultural · Food service · BEAM robotics · Microbotics · Nanorobotics • List of robots · Fictional robotsRobot classification Robot locomotion Wheels · Tracks · Walking · Running · Swimming · Climbing · Hopping · Metachronal motion · Crawling · BrachiatingRobot navigation Robot research Roboticist · Areas · Evolutionary · Kits · Simulator · Suite · Open-source · Software · Adaptable · Developmental · Paradigms · Ubiquitous Portal · Category ·  WikiProjectCategories:
WikiProjectCategories:- Space robots
- Components of the International Space Station
- Canadian space program
- Prototype robots
- 2008 in spaceflight
- Robotic manipulators
- 2008 robots
- Robots of Canada


Wikimedia Foundation. 2010.