- Portal:Computer science
-

- Wikipedia portals:
- Culture
- Geography
- Health
- History
- Mathematics
- Natural sciences
- People
- Philosophy
- Religion
- Society
- Technology
This portal is for the academic discipline of computing science. For other related portals such as computer networking, computer security and information technology, please see portals: technology and applied sciences.
editThe Computing Science Portal
Computing science is the study of the theoretical foundations of information and computation and their implementation and application in computer systems. Computing science encompasses many branches; some emphasize the computation of specific results (such as computer graphics), while others (such as computational complexity theory) relate to properties of computational problems. Still others focus on the challenges in implementing computations. For example, programming language theory studies approaches to describing a computation, while computer programming applies specific programming languages to craft a solution to some concrete computational problems.
More on computing science...editSelected article
A red-black tree is a type of self-balancing binary search tree, a data structure used in computing science, typically used to implement associative arrays. The original structure was invented in 1972 by Rudolf Bayer: who called them "symmetric binary B-trees", but acquired its modern name in a paper in 1978 by Leonidas J. Guibas and Robert Sedgewick. It is complex, but has good worst-case running time for its operations and is efficient in practice: it can search, insert, and delete in O(log n) time, where n is total number of elements in the tree. Put very simply, a red-black tree is a binary search tree which inserts and removes intelligently, to ensure the tree is reasonably balanced. An example of a red-black tree
An example of a red-black tree
A red-black tree is a binary search tree where each node has a color attribute, the value of which is either red or black. In addition to the ordinary requirements imposed on binary search trees, the following additional requirements apply to red-black trees:
- A node is either red or black.
- The root is black. (This rule is used in some definitions and not others. Since the root can always be changed from red to black but not necessarily vice-versa this rule has little effect on analysis.)
- All leaves are black.
- Both children of every red node are black.
- Every simple path from a given node to any of its descendant leaves contains the same number of black nodes.
These constraints enforce a critical property of red-black trees: that the longest path from the root to any leaf is no more than twice as long as the shortest path from the root to any other leaf in that tree. The result is that the tree is roughly balanced. Since operations such as inserting, deleting, and finding values require worst-case time proportional to the height of the tree, this theoretical upper bound on the height allows red-black trees to be efficient in the worst-case, unlike ordinary binary search trees.
editSelected picture
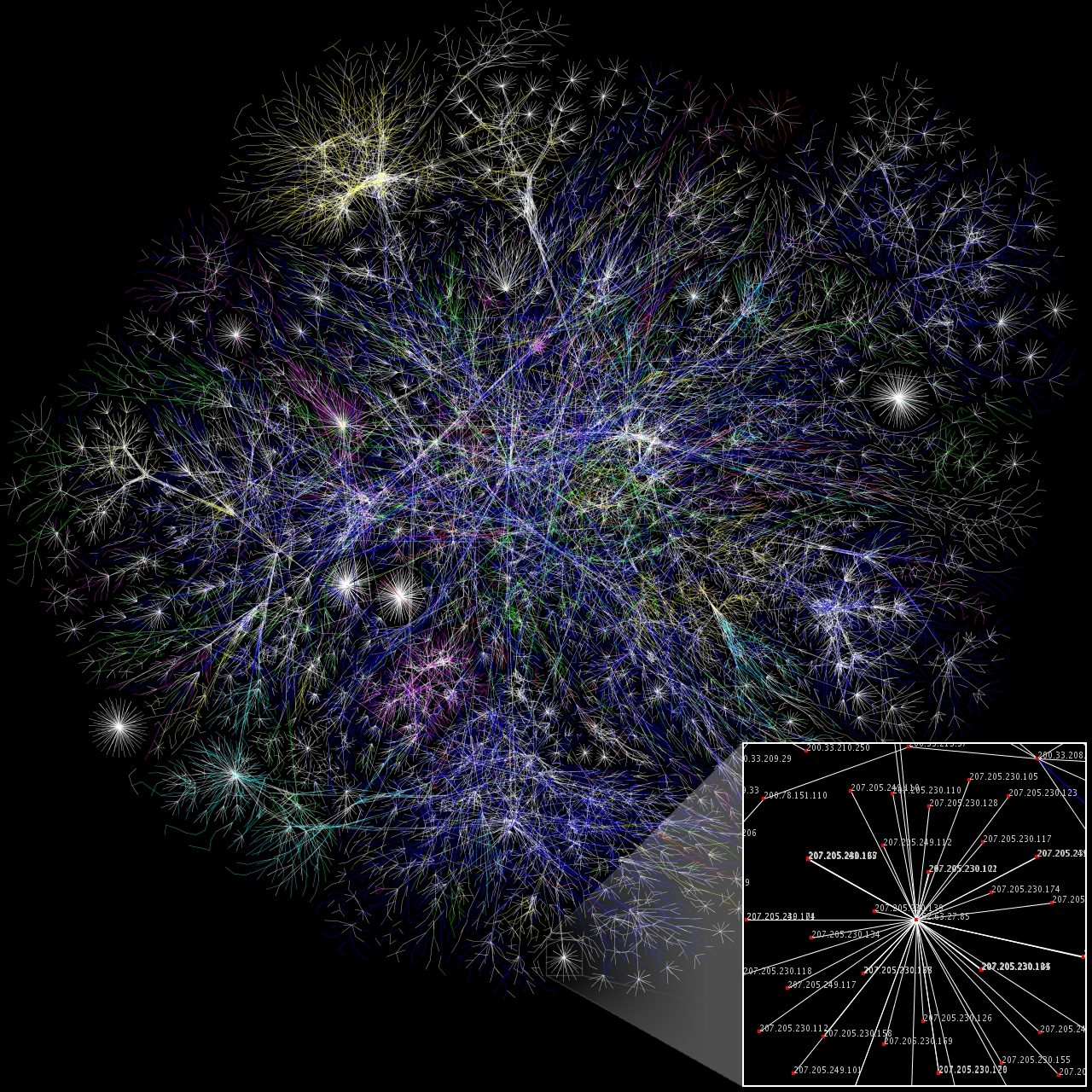
 A partial map of the Internet, rendered based on ping delay and colored based on TLD.edit
A partial map of the Internet, rendered based on ping delay and colored based on TLD.editRelated portals
editSelected biography
Frances Elizabeth "Fran" Allen (born 1932) is an American computing scientist and pioneer in the field of optimizing compilers. Her achievements include seminal work in compilers, code optimization, and parallelization. She also had a role in intelligence work on programming languages and security codes for the National Security Agency.
Allen is a fellow of the IEEE, the Association for Computing Machinery (ACM) and the Computer History Museum. She is currently on the Computer Science and Telecommunications Board, the Computer Research Associates (CRA) board and National Science Foundation's CISE Advisory Board. She is a member of the National Academy of Engineering, the American Academy of Arts and Sciences and the American Philosophical Society.
In 1997, Allen was inducted into the WITI Hall of Fame. She retired from IBM in 2002 and won the Augusta Ada Lovelace Award that year from the Association for Women in Computing.
In 2007 Allen was recognized for her work in high performance computing when she received the A.M. Turing Award for 2006. She became the first woman recipient in the forty year history of the award which is considered the Nobel Prize for computing and is given by the Association for Computing Machinery. In interviews following the award she hoped it would give more "opportunities for women in science, computing and engineering". In 2009 she was awarded an honorary doctor of science degree from McGill university for "pioneering contributions to the theory and practice of optimizing compiler techniques that laid the foundation for modern optimizing compilers and automatic parallel execution".
More about Fran Allen...editComputer science topics
editCategories
- Algebra
- Algorithms
- Artificial intelligence
- Awards
- Competitions
- Compiler construction
- Computational science
- Computer engineering
- Computer programming
- Computing science
- Computing scientists
- Computer vision
- Concurrency
- Conferences
- Cryptography
- Education
- Human–computer interaction
- Information science
- Literature
- Machine learning
- Optimization
editRelated WikiProjects
- C++
- Computational biology
- Computer science
- Computer vision
- Computing
- Cryptography
- Databases
- Java
- Logic
- Mathematics
- Software
editThings you can do
- Copyedit: Computing
- Expand: Computer science, Computer science stubs, Computer science articles needing expert attention
- Create new articles - Requested articles
Categories:- Computer science
- Computing portals



Wikimedia Foundation. 2010.