- Deep Space 1
-
Deep Space 1 
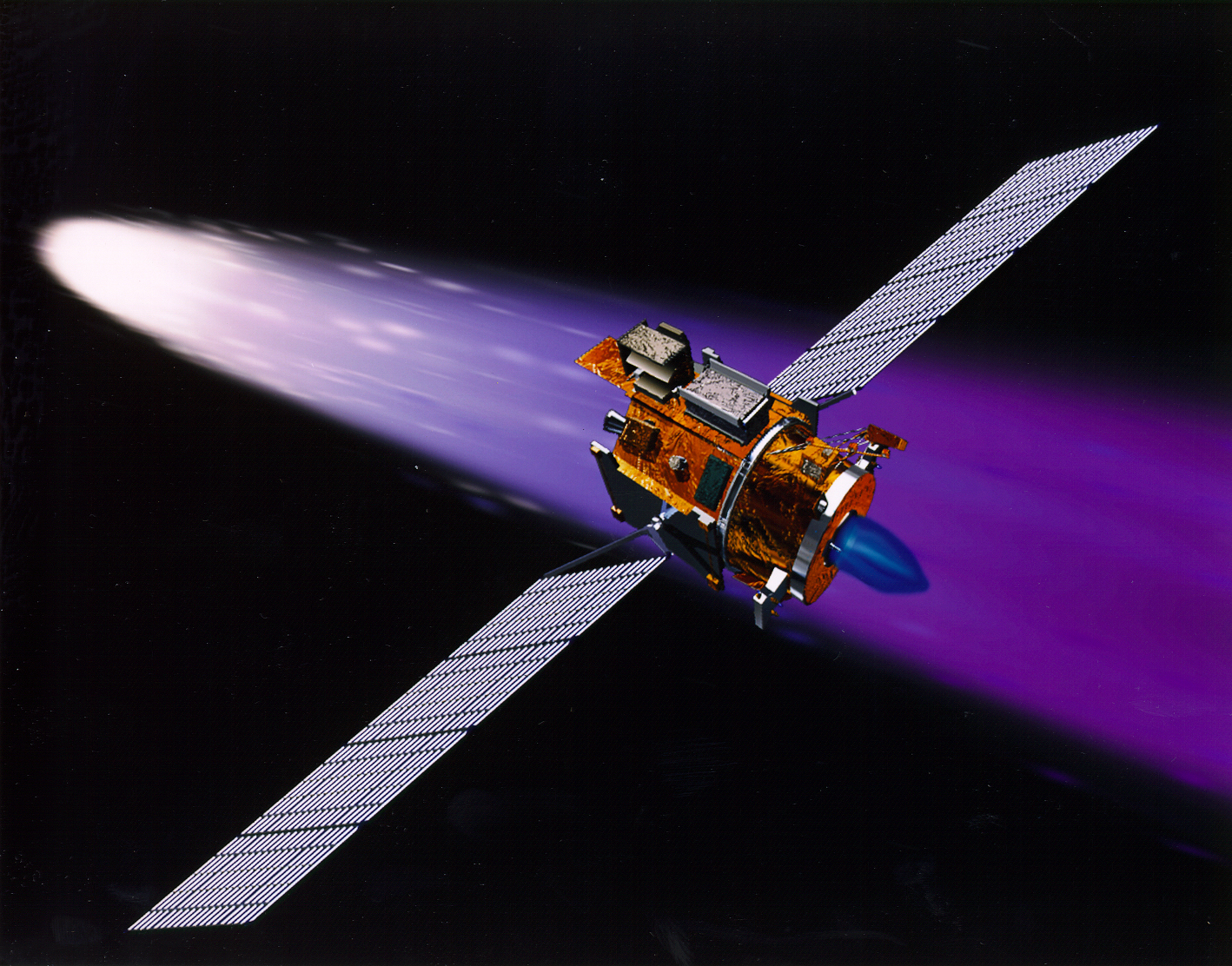
Artist rendering of Deep Space I's flyby of comet 19P/BorrellyOperator NASA / JPL Major contractors Spectrum Astro Mission type Flyby Flyby of Braille, Borrelly Launch date 1998-10-24 12:08:00 UTC
(13 years and 27 days ago)Launch vehicle Delta II 7326 Launch site Space Launch Complex 17A
Cape Canaveral Air Force StationMission duration July 29, 1999 - December 18, 2001
Braille flyby
(completed 1999-07-29)
Borrelly flyby
(completed 2001-09-22)COSPAR ID 1998-061A Homepage Deep Space 1 Mass 373 kg (820 lb) Power 2500 W (Solar Concentrator Array/batteries) Orbital elements Eccentricity 0.143 Inclination 0.4° Apoapsis 1.32 AU Periapsis 0.99 AU Orbital period 453 days Instruments Main instruments Miniature Integrated Camera Spectrometer (MICAS)
Plasma Experiment for Planetary Exploration (PEPE)
The Ion Propulsion System (IPS) Diagnostic Subsystem (IDS)
Deep Space 1 (DS1) is a spacecraft of the NASA New Millennium Program dedicated to testing a payload of advanced, high risk technologies.
Launched on 24 October 1998, the Deep Space mission carried out a flyby of asteroid 9969 Braille, which was selected as the mission's science target. Its mission was extended twice to include an encounter with Comet Borrelly and further engineering testing. Problems during its initial stages and with its star tracker led to repeated changes in mission configuration. While the flyby of the asteroid was a partial success, the encounter with the comet retrieved valuable information. Three of twelve technologies on board had to work within a few minutes of separation from the carrier rocket for the mission to continue.
The Deep Space series was continued by the Deep Space 2 probes, which were launched in January 1999 on Mars Polar Lander and were intended to strike the surface of Mars.
Contents
Technologies
The Autonav system, developed by NASA's Jet Propulsion Laboratory, takes images of known bright asteroids. The asteroids in the inner Solar System move in relation to other bodies at a noticeable, predictable speed. Thus a spacecraft can determine its relative position by tracking such asteroids across the star background, which appears fixed over such timescales. Two or more asteroids let the spacecraft triangulate its position; two or more positions in time let the spacecraft determine its trajectory. Existing spacecraft are tracked by their interactions with the transmitters of the Deep Space Network (DSN), in effect an inverse GPS. However, DSN tracking requires many skilled operators, and the DSN is overburdened by its use as a communications network. The use of Autonav reduces mission cost and DSN demands.
The Autonav system can also be used in reverse, tracking the position of bodies relative to the spacecraft. This is used to acquire targets for the scientific instruments. The spacecraft is programmed with the target's coarse location. After initial acquisition, Autonav keeps the subject in frame, even commandeering the spacecraft's attitude control. The next spacecraft to use Autonav was Deep Impact.
SCARLET concentrating solar array
Primary power for the mission was produced by a new solar array technology, the Solar Concentrator Array with Refractive Linear Element Technology (SCARLET), which uses linear Fresnel lenses made of silicone to concentrate sunlight onto solar cells.[1] ABLE Engineering developed the concentrator technology and built the solar array for DS1, with Entech Inc, who supplied the Fresnel optics, and the NASA Glenn Research Center. The activity was sponsored by the Ballistic Missile Defense Organization. The concentrating lens technology was combined with dual-junction solar cells, which had considerably better performance than the GaAs solar cells that were the state of the art at the time of the mission launch.
The SCARLET arrays generated 2.5 kilowatts at 1 AU, with less size and weight than conventional arrays.
NSTAR ion engine
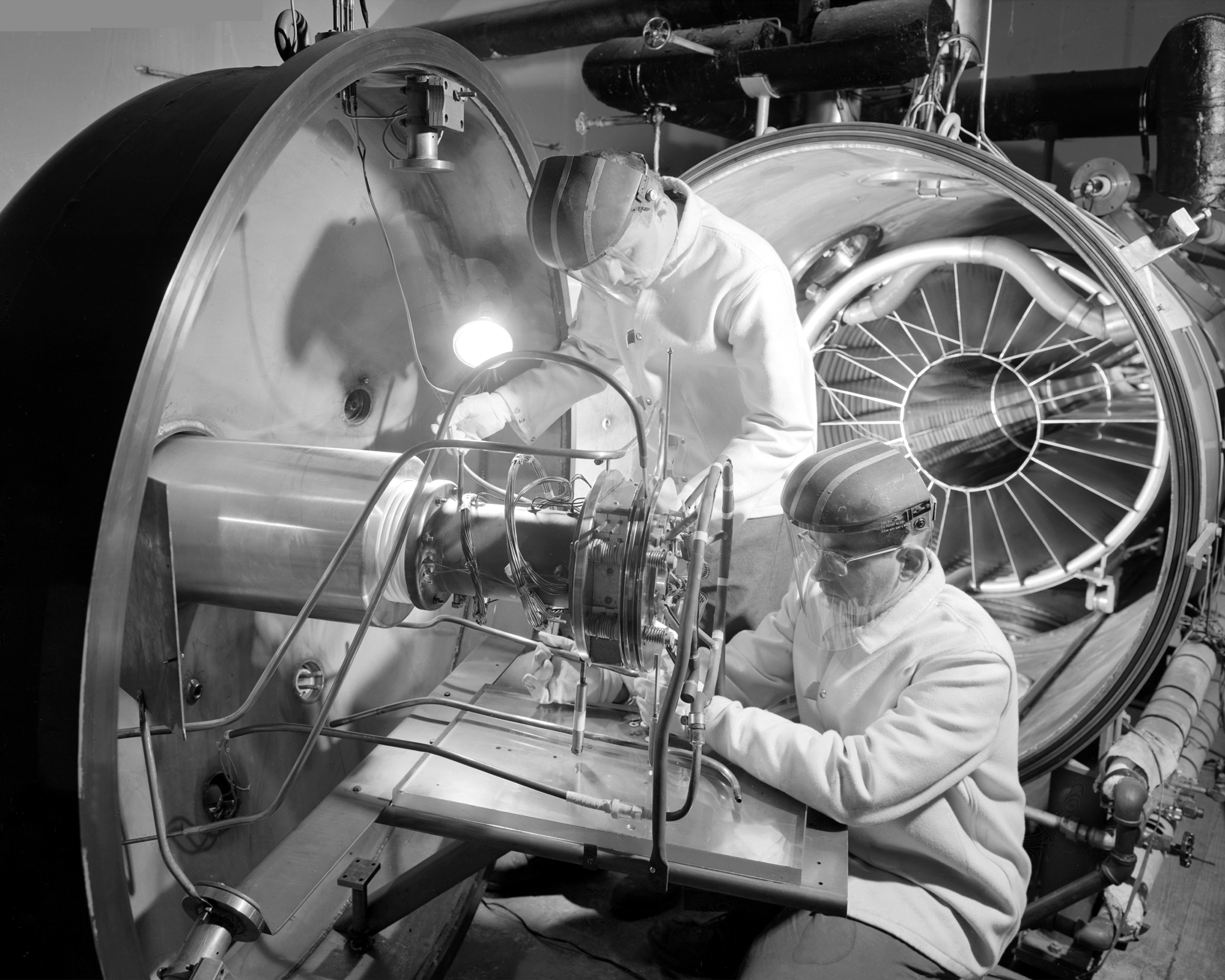
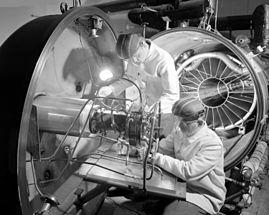 Technicians are installing ion engine #1 in the High Vacuum Tank in the Electric Propulsion Research Building in this image from 1959.
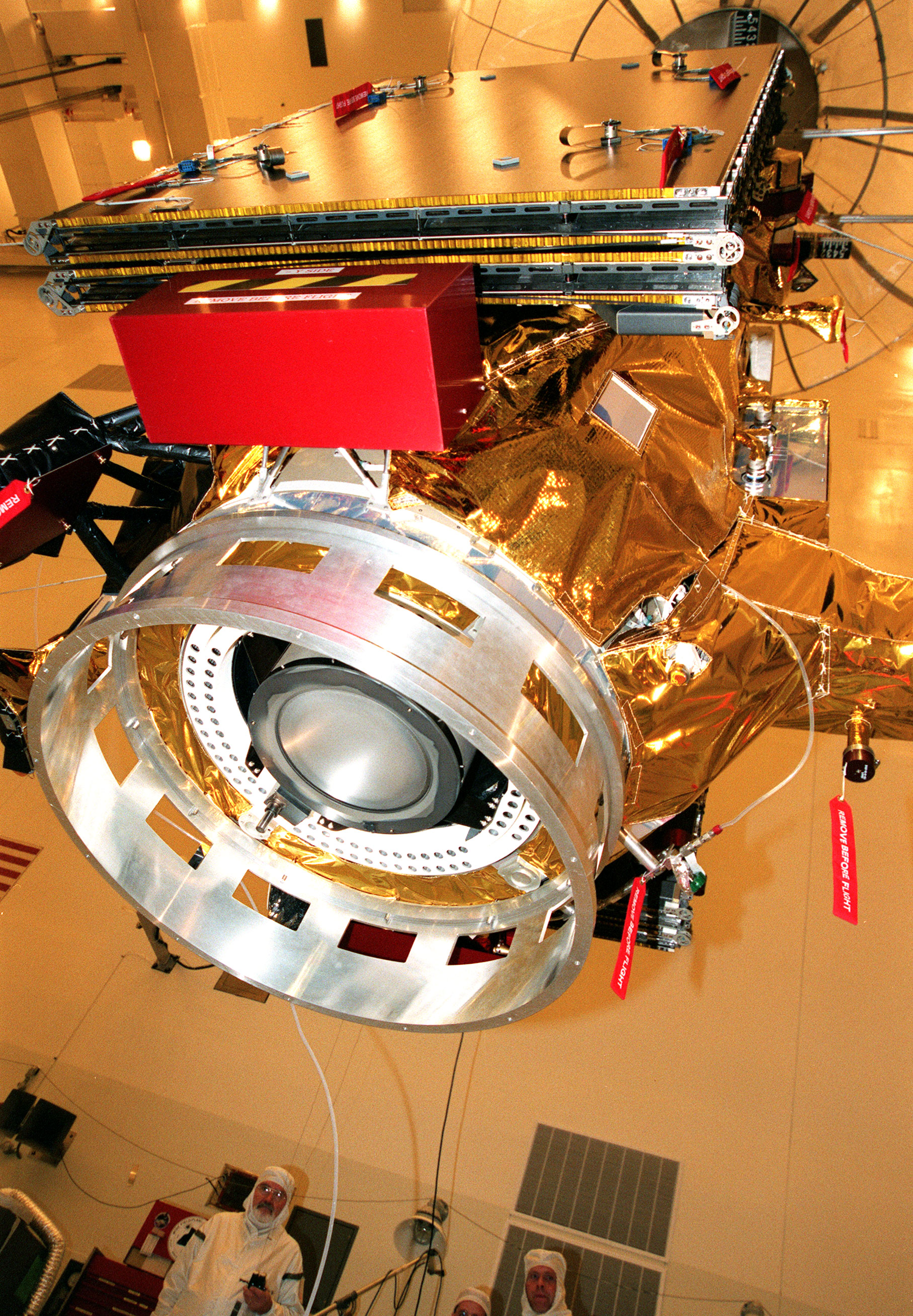
Technicians are installing ion engine #1 in the High Vacuum Tank in the Electric Propulsion Research Building in this image from 1959. The fully assembled Deep Space 1 probe
The fully assembled Deep Space 1 probe Past, Present, Future
Past, Present, FutureAlthough ion engines had been developed at NASA since the late 1950s, with the exception of the SERT missions in the 1960s, the technology had not been demonstrated in flight. This lack of a performance history in space meant that despite the potential savings in propellant mass, the technology was considered too experimental to be being used for high-cost missions. It was a primary mission of the Deep Space 1 demonstration to show long duration use of an ion thruster on a science mission. Deep Space 1 was the first use of ion engines on an operational science spacecraft.[citation needed]
The NSTAR electrostatic ion thruster, developed at NASA Glenn, achieves a specific impulse of one to three thousand seconds. This is an order of magnitude higher than traditional space propulsion methods, resulting in a mass savings of approximately half. This leads to much cheaper launch vehicles. Although the engine produces just 92 millinewtons (0.331 ounce-force) thrust at maximum power, the craft achieved high speeds because ion engines thrust continuously for long periods. The engine fired for 678 total days, a record for such engines.[citation needed] The next spacecraft to use NSTAR engines was the Dawn spacecraft, with three redundant units.[2]
Remote Agent
Remote Agent (remote intelligent self-repair software)(RAX), developed at NASA Ames Research Center and JPL, was the first artificial intelligence control system to control a spacecraft without human supervision.[3] Remote Agent successfully demonstrated the ability to plan onboard activities and correctly diagnose and respond to simulated faults in spacecraft components. Autonomous control will enable future spacecraft to operate at greater distances from Earth, and to carry out more sophisticated science-gathering activities in deep space. Components of the Remote Agent software have been used to support other NASA Missions. Major components of Remote Agent were a robust planner (EUROPA), a plan execution system (EXEC) and a model-based diagnostic system (Livingstone). EUROPA was used as a ground-based planner for the Mars Exploration Rovers. EUROPA II was used to support the Phoenix Mars Lander and will support the upcoming Mars Science Laboratory. Livingstone2 was flown as an experiment onboard Earth Observing 1, and an F-18 at NASA Dryden Flight Research Center.
Beacon Monitor
Another method for reducing DSN burdens is the Beacon Monitor experiment. During the long cruise periods of the mission, spacecraft operations are essentially suspended. Instead of data, the craft emits a carrier signal on a predetermined frequency. Without data decoding, the carrier can be detected by much simpler ground antennas and receivers. If the spacecraft detects an anomaly, it changes the carrier between four tones, based on urgency. Ground receivers then signal operators to divert DSN resources. This prevents skilled operators and expensive hardware from babysitting an unburdened mission operating nominally. A similar system is used on the New Horizons Pluto probe to keep costs down during its ten-year cruise from Jupiter to Pluto.
SDST
The Small Deep Space Transponder (SDST) is a compact and light weight radio communications system. Aside from using miniaturized components, the SDST is capable of communicating over the Ka band. Because this band is higher in frequency than bands currently in use by deep-space missions, the same amount of data can be sent by smaller equipment in space and on the ground. Conversely, existing DSN antennas can split time among more missions. At the time of launch, the DSN had a small number of Ka receivers installed on an experimental basis; Ka operations and missions are increasing.
PEPE
Once at a target, DS1 senses the particle environment with the PEPE (Plasma Experiment for Planetary Exploration) instrument. It maps the objects with the MICAS (Miniature Integrated Camera And Spectrometer) imaging channel, and discerns chemical composition with infrared and ultraviolet channels. All channels share a 10 cm telescope, which uses a silicon carbide mirror.
Achievements

The ion propulsion engine initially failed after 4.5 minutes of operation. However, it was later restored to action and performed excellently. Early in the mission, material ejected during launch vehicle separation caused the closely spaced ion extraction grids to short-circuit. The contamination was eventually cleared, as the material was eroded by electrical arcing, sublimed by outgassing, or simply allowed to drift out. This was achieved by repeatedly restarting the engine in an engine repair mode, arcing across trapped material.[4]
It was thought that the ion exhaust might interfere with other spacecraft systems, such as radio communications or the science instruments. The PEPE detectors had a secondary function to monitor such effects from the engine. No interference was found.
Another failure was the loss of the star tracker. The star tracker determines spacecraft orientation by comparing the star field to its internal charts. The mission was saved when the MICAS camera was reprogrammed to substitute for the star tracker. Although MICAS is more sensitive, its field-of-view is an order of magnitude smaller, creating a greater information processing burden. Ironically, the star tracker was an off-the-shelf component, expected to be highly reliable.[5]
Without a working star tracker, ion thrusting was temporarily suspended. The loss of thrust time forced the cancellation of a flyby past Comet Wilson-Harrington.
The Autonav system required occasional manual corrections. Most problems were in identifying objects that were too dim, or were difficult to identify because of brighter objects causing diffraction spikes and reflections in the camera, causing Autonav to misidentify targets.
The Remote Agent system was presented with three simulated failures on the spacecraft and correctly handled each event.
- a failed electronics unit, which Remote Agent fixed by reactivating the unit.
- a failed sensor providing false information, which Remote Agent recognized as unreliable and therefore correctly ignored.
- an attitude control thruster (a small engine for controlling the spacecraft's orientation) stuck in the "off" position, which Remote Agent detected and compensated for by switching to a mode that did not rely on that thruster.
Overall this constituted a successful demonstration of fully autonomous planning, diagnosis, and recovery.
The MICAS instrument was a design success, but the ultraviolet channel failed due to an electrical fault. Later in the mission, after the star tracker failure, MICAS assumed this duty as well. This caused continual interruptions in its scientific use during the remaining mission, including the Comet Borrelly encounter.[6]
The flyby of the asteroid 9969 Braille was only a partial success. Deep Space 1 was intended to perform the flyby at 56,000 km/h (34,797 mph) at only 240 m (787 ft) from the asteroid. Due to technical difficulties, including a software crash shortly before approach, the craft instead passed Braille at a distance of 26 km (16 mi). This, plus Braille's lower albedo, meant that the asteroid was not bright enough for the autonav to focus the camera in the right direction, and the picture shoot was delayed by almost an hour.[5] The resulting pictures were disappointingly indistinct.
However, the flyby of Comet Borrelly was a great success and returned extremely detailed images of the comet's surface. Such images were of higher resolution than the only previous pictures, of Halley's Comet taken by the Giotto spacecraft. The PEPE instrument reported that the comet's fields were offset from the nucleus. This is believed to be due to emission of jets, which were not distributed evenly across the comet's surface.
Despite having no debris shields, the spacecraft survived the comet passage intact. Once again, the sparse comet jets did not appear to point towards the spacecraft. Deep Space 1 then entered its second extended mission phase, focused on retesting the spacecraft's hardware technologies. The focus of this mission phase was on the ion engine systems. The spacecraft eventually ran out of hydrazine fuel for its attitude control thrusters. The highly efficient ion thruster had a sufficient amount of propellant left to perform attitude control in addition to main propulsion, thus allowing the mission to continue.[6]
Current status
 Launch of Deep Space 1 from Cape Canaveral Air Force Station Space Launch Complex 17-A on the Delta II 7326-9.5 Star 37FM
Launch of Deep Space 1 from Cape Canaveral Air Force Station Space Launch Complex 17-A on the Delta II 7326-9.5 Star 37FM
Deep Space 1 succeeded in its primary and secondary objectives including flybys of the asteroid Braille and of Comet Borrelly, returning valuable science data and images. DS1's ion engines were shut down on 18 December 2001 at approximately 20:00:00 UTC, signaling the end of the mission. However, on-board communications remain active in case the craft is needed in the future.[7]
A proposed alternative end-of-mission plan involved an encounter with the asteroid 1999 KK1 in August 2002. However, cost reasons meant this was not selected.
Statistics
- the mass of the craft: 486.3 kg (1072 lb 2 oz) (with fuel)
- total cost: US$149.7 million
- development cost: US$94.8 million
- prime contractor: Spectrum Astro, later acquired by General Dynamics
- launch site: Cape Canaveral Air Station, Florida
- launch vehicle: Boeing Delta II model 7326
- maximum power: 2,500 W (of which 2,100 W powers the ion thrust engine)
- project manager: Dr. Marc Rayman
References
- ^ "DS1 Technology Validation Reports". SCARLET Solar Array. Jet Propulsion Laboratory. 2001. http://nmp-techval-reports.jpl.nasa.gov/. Retrieved 2011-07-17.
- ^ http://dawn.jpl.nasa.gov/mission/spacecraft.asp
- ^ Hamed Jafari (5 February 2007). "Remote Agent Executive for Deep Space 1". NASA. http://ti.arc.nasa.gov/tech/asr/planning-and-scheduling/remote-agent/. Retrieved 2009-04-22.[dead link]
- ^ Rayman, M.D. and Varghese, P. and Lehman, D.H. and Livesay, L.L. (2000). "Results from the Deep Space 1 technology validation mission". Acta Astronautica (Elsevier) 47 (2-9): 475–487. http://trs-new.jpl.nasa.gov/dspace/bitstream/2014/17743/1/99-1185.pdf.
- ^ a b Rayman, M.D. and Varghese, P. (2001). "The deep space 1 extended mission". Acta Astronautica (Elsevier) 48 (5-12): 693–705. http://nmp.jpl.nasa.gov/ds1/DS1_Extended_Mission.pdf.
- ^ a b Rayman, M.D. (2003). "The successful conclusion of the Deep Space 1 Mission: important results without a flashy title". Space Technology 23 (2): 185–196. http://nmp.nasa.gov/ds1/DS1_conclusion.pdf.
- ^ E. Bell, II (5 August 2008). "Deep Space 1 (1998-061ADS1)". NSSDC Master Catalog. NASA - National Space Science Data Center. http://nssdc.gsfc.nasa.gov/nmc/spacecraftDisplay.do?id=1998-061A. Retrieved 2009-04-22.
External links
- Deep Space 1 website at the Jet Propulsion Laboratory (JPL)
- Deep Space 1 Mission Profile by NASA's Solar System Exploration
- Remote Agent homepage at NASA Ames Research Center's Intelligent Systems Division
- Deep Space 1 at Encyclopedia Astronautica
- Electric Propulsion at NASA JPL
Spaceflight missions to asteroids Flybys Orbiters Landers NEAR Shoemaker · MINERVA (failed) · HayabusaPlanned Hayabusa 2 (lander) · OSIRIS-REx (lander)Proposed Don Quijote · MarcoPolo-R · SIMONECancelled AGORA · MAOSEP · VESTA · CRAF · Marco PoloItalics indicate active missions.Far flyby Near flyby Vega program (1 · 2) · Giotto · Suisei · Deep Space 1 · CONTOUR (failed) · Deep Impact/EPOXI · Stardust/NExT · RosettaSample return Lander Planned and Proposed Cancelled VESTA · CRAF · Marco PoloItalics indicate active missions.
Halley Armada New Millennium Program Launched Deep Space 1 · Deep Space 2 · Earth Observing-1 · Space Technology 5
Cancelled Champollion · Deep Space 4 · Earth Observing-2 · Earth Observing-3 · Space Technology 4 · Space Technology 6 · Space Technology 7 · Space Technology 8
← 1997 · Orbital launches in 1998 · 1999 → Lunar Prospector | Skynet 4D | Ofek-4 | STS-89 | Soyuz TM-27 | USA-137 | Brasilsat B3 · Inmarsat-3 F5 | Orbcomm FM3 · Orbcomm FM4 · GFO · Ad Astra | Globalstar 1 · Globalstar 2 · Globalstar 3 · Globalstar 4 | Kosmos 2349 | Iridium 50 · Iridium 52 · Iridium 53 · Iridium 54 · Iridium 56 | Kakehashi | SNOE · Teledesic 1 | Hot Bird 4 | Intelsat 806 | Progress M-38 (VDU-2) | USA-138 | SPOT 4 | Iridium 51 · Iridium 61 | Iridium 55 · Iridium 57 · Iridium 58 · Iridium 59 · Iridium 60 | TRACE | Iridium 62 · Iridium 63 · Iridium 64 · Iridium 65 · Iridium 66 · Iridium 67 · Iridium 68 | STS-90 | Globalstar 6 · Globalstar 8 · Globalstar 14 · Globalstar 15 | Nilesat 101 · BSat-1B | Kosmos 2350 | Iridium 69 · Iridium 71 | Kosmos 2351 | EchoStar IV | USA-139 | NOAA-15 | Progress M-39 | Iridium 70 · Iridium 72 · Iridium 73 · Iridium 74 · Iridium 75 | Zhongwei 1 | STS-91 | Thor 3 | Kosmos 2352 · Kosmos 2353 · Kosmos 2354 · Kosmos 2355 · Kosmos 2356 · Kosmos 2357 | Intelsat 805 | Kosmos 2358 | Kosmos 2359 | Molniya 3-49 | Nozomi | Shtil-1 · Tubsat-N · Tubsat-N1 | Resurs-O1 #4 · Fasat-Bravo · TMSAT · Gurwin Techsat 1B · WESTPAC · SAFIR-2 | Sinosat-1 | Kosmos 2360 | Orbcomm FM13 · Orbcomm FM14 · Orbcomm FM15 · Orbcomm FM16 · Orbcomm FM17 · Orbcomm FM18 · Orbcomm FM19 · Orbcomm FM20 | Mercury 3 | Soyuz TM-28 | Iridium 3 · Iridium 76 | ST-1 | Galaxy 10 | Astra 2A | Kwangmyŏngsŏng-1 | Iridium 77 · Iridium 79 · Iridium 80 · Iridium 81 · Iridium 82 | Globalstar 5 · Globalstar 7 · Globalstar 9 · Globalstar 10 · Globalstar 11 · Globalstar 12 · Globalstar 13 · Globalstar 16 · Globalstar 17 · Globalstar 18 · Globalstar 20 · Globalstar 21 | PAS-7 | Orbcomm FM21 · Orbcomm FM22 · Orbcomm FM23 · Orbcomm FM24 · Orbcomm FM25 · Orbcomm FM26 · Orbcomm FM27 · Orbcomm FM28 | Molniya-1T #99 | STEX (USA-141) | Eutelsat W2 · Sirius 3 | Hot Bird 5 | USA-140 | Maqsat 3 | Deep Space 1 · SEDSAT-1 | Progress M-40 (Sputnik 41) | AfriStar · GE-5 | STS-95 (SPARTAN-201 · PANSAT) | PAS-8 | Iridium 2 · Iridium 83 · Iridium 84 · Iridium 85 · Iridium 86 | Zarya | Bonum 1 | STS-88 (Unity · PMA-1 · PMA-2 · SAC-A · MightySat-1 | Satmex 5 | SWAS | Nadezhda 5 · Astrid 2 | Mars Climate Orbiter | Iridium 11 · Iridium 20 | PAS-6B | Kosmos 2361 | Kosmos 2362 · Kosmos 2363 · Kosmos 2364Payloads are separated by bullets ( · ), launches by pipes ( | ). Manned flights are indicated in bold text. Uncatalogued launch failures are listed in italics. Payloads deployed from other spacecraft are denoted in brackets.Categories:- 1998 in spaceflight
- Inactive extraterrestrial probes
- NASA probes
- New Millennium Program
- Spacecraft launched by Delta II rockets


Wikimedia Foundation. 2010.