- Direct torque control
-
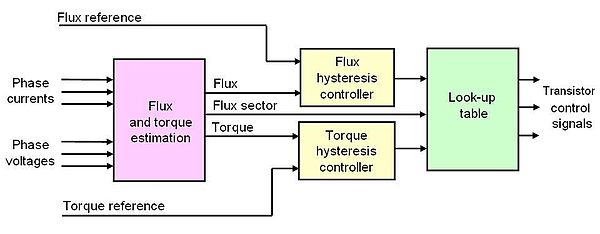
Direct torque control (DTC) is one method used in variable frequency drives to control the torque (and thus finally the speed) of three-phase AC electric motors. This involves calculating an estimate of the motor's magnetic flux and torque based on the measured voltage and current of the motor.
Method
Stator flux linkage is estimated by integrating the stator voltages. Torque is estimated as a cross product of estimated stator flux linkage vector and measured motor current vector. The estimated flux magnitude and torque are then compared with their reference values. If either the estimated flux or torque deviates from the reference more than allowed tolerance, the transistors of the variable frequency drive are turned off and on in such a way that the flux and torque will return in their tolerance bands as fast as possible. Thus direct torque control is one form of the hysteresis or bang-bang control.
This control method implies the following properties of the control:
- Torque and flux can be changed very fast by changing the references
- High efficiency & low losses - switching losses are minimized because the transistors are switched only when it is needed to keep torque and flux within their hysteresis bands
- The step response has no overshoot
- No coordinate transforms are needed, all calculations are done in stationary coordinate system
- No separate modulator is needed, the hysteresis control defines the switch control signals directly
- There are no PI current controllers. Thus no tuning of the control is required
- The switching frequency of the transistors is not constant. However, by controlling the width of the tolerance bands the average switching frequency can be kept roughly at its reference value. This also keeps the current and torque ripple small. Thus the torque and current ripple are of the same magnitude than with vector controlled drives with the same switching frequency.
- Due to the hysteresis control the switching process is random by nature. Thus there are no peaks in the current spectrum. This further means that the audible noise of the machine is low
- The intermediate DC circuit's voltage variation is automatically taken into account in the algorithm (in voltage integration). Thus no problems exist due to dc voltage ripple (aliasing) or dc voltage transients
- Synchronization to rotating machine is straightforward due to the fast control; Just make the torque reference zero and start the inverter. The flux will be identified by the first current pulse
- Digital control equipment has to be very fast in order to be able to prevent the flux and torque from deviating far from the tolerance bands. Typically the control algorithm has to be performed with 10 - 30 microseconds or shorter intervals. However, the amount of calculations required is small due to the simplicity of the algorithm
- The current measuring devices have to be high quality ones without noise because spikes in the measured signals easily cause erroneous control actions. Further complication is that no low-pass filtering can be used to remove noise because filtering causes delays in the resulting actual values that ruins the hysteresis control
- The stator voltage measurements should have as low offset error as possible in order to keep the flux estimation error down. For this reason the stator voltages are usually estimated from the measured DC intermediate circuit voltage and the transistor control signals
- In higher speeds the method is not sensitive to any motor parameters. However, at low speeds the error in stator resistance used in stator flux estimation becomes critical
The direct torque method performs very well even without speed sensors. However, the flux estimation is usually based on the integration of the motor phase voltages. Due to the inevitable errors in the voltage measurement and stator resistance estimate the integrals tend to become erroneous at low speed. Thus it is not possible to control the motor if the output frequency of the variable frequency drive is zero. However, by careful design of the control system it is possible to have the minimum frequency in the range 0.5 Hz to 1 Hz that is enough to make possible to start an induction motor with full torque from a standstill situation. A reversal of the rotation direction is possible too if the speed is passing through the zero range rapidly enough to prevent excessive flux estimate deviation.
If continuous operation at low speeds including zero frequency operation is required, a speed or position sensor can be added to the DTC system. With the sensor, high accuracy of the torque and speed control can be maintained in the whole speed range.
History
Direct torque control was patented by Manfred Depenbrock in U.S. Patent 4,678,248 filed originally on October 20, 1984 in Germany. He called it "Direct Self-Control" (DSC). However, Isao Takahashi and Toshihiko Noguchi presented a similar idea only few months later in a Japanese journal. Thus direct torque control is usually credited to all three gentlemen.
The only difference between DTC and DSC is the shape of the path along which the flux vector is controlled to follow. In DTC the path is a circle and in DSC it was a hexagon. Today DTC uses hexagon flux path only when full voltage is required at high speeds.
Since Depenbrock, Takahashi and Noguchi had proposed direct torque control (DTC) for induction machines in the mid 1980s, this new torque control scheme has gained much momentum. From its introduction, the Direct Torque control or Direct Self Control (DSC) principle has been used for Induction Motor (IM) drives with fast dynamics. Despite its simplicity, DTC is able to produce very fast torque and flux control, if the torque and flux are correctly estimated.
Among the others, DTC/DSC was further studied in Ruhr-University in Bochum, Germany at the end of 80's. A very good treatment of the subject can be found from the doctoral thesis:
- Uve Baader: Die Direkte-Selbstregelung (DSR), Ein Verfahren zur hochdynamischen Regelung von Drehfeldmaschinen. Fortschr.-Ber. VDI Reihe 21, Nr. 35. VDI-Verlag 1988. ISBN 3-18-143521-X
The first commercial application was in traction. At the end of 80's DSC was tried in German diesel-electric locomotives DE502 [1][2] and DE1003 [3] by ABB, please see paper:
- Jänecke, M., Kremer, R., Steuerwald, G.: Direct Self-Control (DSC), A Novel Method Of Controlling Asynchronous Machines In Traction Applications. Proceedings of EPE 1989, October 9–12, 1989 Aachen, Germany, Vol. 1, pp. 75–81.
The first major commercial application was, however, the ACS600 variable speed drive by ABB that saw the daylight in 1995. ACS600 has later been replaced with ACS800 [4]. A good presentation of ACS600 and a full theoretical treatment of direct torque control can be found in the book:
- Peter Vas: Sensorless Vector and Direct Torque Control, Oxford University Press, 1998, ISBN 0-19-856465-1
Also dealing with DTC and ACS600 are:
- Tiitinen, P., Pohjalainen, P., Lalu, J.: The Next Generation Motor Control Method: Direct Torque Control (DTC). EPE Journal, Vol. 5., no 1, March 1995, pp. 14–18 [5].
- Nash, J.: Direct Torque Control, Induction Motor Vector Control Without an Encoder. IEEE Tr. on Industry Applications, Vol. 33, No. 2, March/April 1997 [6].
DTC has also been applied to three-phase grid side converter control (U.S. Patent 5,940,286). Grid side converter is identical in structure to the transistor inverter controlling the machine. Thus it can in addition to rectifying AC to DC also feed back energy from the DC to the AC grid. Further, the waveform of the phase currents is very sinusoidal and power factor can be adjusted as desired. In the grid side converter DTC version the grid is considered to be a big electric machine (which, actually, there are many in the grid!). A paper dealing with grid side converter DTC was presented already in 1995:
- Manninen, V.: Application of Direct Torque Control Modulation to a Line Converter. Proc. of EPE 1995, Sept. 19-21, 1995, Sevilla, Spain, Proceedings pp. 1.292-1.296.
In the late 1990s DTC techniques for the Interior Permanent Magnet Synchronous Machine (IPMSM) appeared.
Further, in the beginning of 2000's DTC was applied to doubly fed machine control (U.S. Patent 6,448,735). Doubly fed generators are today commonly used in wind turbine applications.
Thinking of the outstanding torque control dynamics of the DTC it was somewhat surprising that the first servo drive using DTC, ABB's ACSM1,[7] was introduced quite late, in 2007.
During 2000's several papers have been published about DTC. Also several modifications such as space vector modulated DTC that has constant switching frequency, has been presented.
Due to the expiring of the DTC patent by Depenbrock in 2004 it is to be expected that other companies than ABB will also start to sell drives using DTC.
See also
Electric motors Broad motor categories 
Conventional
electric motorsUnusual electric motors Ball bearing • Homopolar • Piezoelectric • Ultrasonic • Electrostatic • Switched reluctance • Superconducting electric machine • Electrically powered spacecraft propulsionMotor
controllersAdjustable-speed drive • Motor soft starter • Braking chopper • DC injection braking • Amplidyne • Direct torque control • Direct on line starter • Electronic speed control • Metadyne • Motor controller • Variable-frequency drive • Vector control • Ward Leonard control • Thyristor driveSee also Categories:- Electric motors


Wikimedia Foundation. 2010.