- Network synthesis filters
-
Network synthesis is a method of designing signal processing filters. It has produced several important classes of filter including the Butterworth filter, the Chebyshev filter and the Elliptic filter. It was originally intended to be applied to the design of passive linear analogue filters but its results can also be applied to implementations in active filters and digital filters. The essence of the method is to obtain the component values of the filter from a given mathematical polynomial ratio expression representing the desired transfer function.
Contents
Description of method
The method can be viewed as the inverse problem of network analysis. Network analysis starts with a network and by applying the various electric circuit theorems predicts the response of the network. Network synthesis on the other hand, starts with a desired response and its methods produce a network that outputs, or approximates to, that response.[1]
Network synthesis was originally intended to produce filters of the kind formerly described as "wave filters" but now usually just called filters. That is, filters whose purpose is to pass waves of certain wavelengths while rejecting waves of other wavelengths. Network synthesis starts out with a specification for the transfer function of the filter, H(s), as a function of complex frequency, s. This is used to generate an expression for the input impedance of the filter (the driving point impedance) which then, by a process of continued fraction or partial fraction expansions results in the required values of the filter components. In a digital implementation of a filter, H(s) can be implemented directly.[2]
The advantages of the method are best understood by comparing it to the filter design methodology that was used before it, the image method. The image method considers the characteristics of an individual filter section in an infinite chain (ladder topology) of identical sections. The filters produced by this method suffer from innaccuracies due to the theoretical termination impedance, the image impedance, not generally being equal to the actual termination impedance. This is not the case with network synthesis filters, the terminations are included in the design from the start. The image method also requires a certain amount of experience on the part of the designer. The designer must first decide how many sections and of what type should be used, and then after calculation, will obtain the transfer function of the filter. This may not be what is required and there can be a number of iterations. The network synthesis method, on the other hand, starts out with the required function and outputs the sections needed to build the corresponding filter.[2]
In general, the sections of a network synthesis filter are identical topology (usually the simplest ladder type) but different component values are used in each section. By contrast, the structure of an image filter has identical values at each section - this is a consequence of the infinite chain approach - but may vary the topology from section to section to achieve various desirable characteristics. Both methods make use of low-pass prototype filters followed by frequency transformations and impedance scaling to arrive at the final desired filter.[2]
Important filter classes
Linear analog electronic filters Network synthesis filters- Butterworth filter
- Chebyshev filter
- Elliptic (Cauer) filter
- Bessel filter
- Gaussian filter
- Optimum "L" (Legendre) filter
- Linkwitz-Riley filter
Simple filtersedit The class of a filter refers to the class of polynomials from which the filter is mathematically derived. The order of the filter is the number of filter elements present in the filter's ladder implementation. Generally speaking, the higher the order of the filter, the steeper the cut-off transition between passband and stopband. Filters are often named after the mathematician or mathematics on which they are based rather than the discoverer or inventor of the filter.
Butterworth filter
Main article: Butterworth filterButterworth filters are described as maximally flat, meaning that the response in the frequency domain is the smoothest possible curve of any class of filter of the equivalent order.[3]
The Butterworth class of filter was first described in a 1930 paper by the British engineer Stephen Butterworth after whom it is named. The filter response is described by Butterworth polynomials, also due to Butterworth.[4]
Chebyshev filter
Main article: Chebyshev filterA Chebyshev filter has a faster cut-off transition than a Butterworth, but at the expense of there being ripples in the frequency response of the passband. There is a compromise to be had between the maximum allowed attenuation in the passband and the steepness of the cut-off response. This is also sometimes called a type I Chebyshev, the type 2 being a filter with no ripple in the passband but ripples in the stopband. The filter is named after Pafnuty Chebyshev whose Chebyshev polynomials are used in the derivation of the transfer function.[3]
Cauer filter
Main article: Elliptical filterCauer filters have equal maximum ripple in the passband and the stopband. The Cauer filter has a faster transition from the passband to the stopband than any other class of network synthesis filter. The term Cauer filter can be used interchangeably with elliptical filter, but the general case of elliptical filters can have unequal ripples in the passband and stopband. An elliptical filter in the limit of zero ripple in the passband is identical to a Chebyshev Type 1 filter. An elliptical filter in the limit of zero ripple in the stopband is identical to a Chebyshev Type 2 filter. An elliptical filter in the limit of zero ripple in both passbands is identical to a Butterworth filter. The filter is named after Wilhelm Cauer and the transfer function is based on elliptic rational functions.[5]
Bessel filter
Main article: Bessel filter- The Bessel filter has a maximally flat time-delay (group delay) over its passband. This gives the filter a linear phase response and results in it passing waveforms with minimal distortion. The Bessel filter has minimal distortion in the time domain due to the phase response with frequency as opposed to the Butterworth filter which has minimal distortion in the frequency domain due to the attenuation response with frequency. The Bessel filter is named after Friedrich Bessel and the transfer function is based on Bessel polynomials.[6]
Driving point impedance
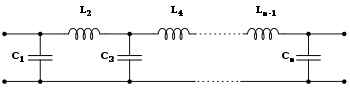 Low-pass filter implemented as a ladder (Cauer) topology
Low-pass filter implemented as a ladder (Cauer) topology
The driving point impedance is a mathematical representation of the input impedance of a filter in the frequency domain using one of a number of notations such as Laplace transform (s-domain) or Fourier transform (jω-domain). Treating it as a one-port network, the expression is expanded using continued fraction or partial fraction expansions. The resulting expansion is transformed into a network (usually a ladder network) of electrical elements. Taking an output from the end of this network, so realised, will transform it into a two-port network filter with the desired transfer function.[1]
Not every possible mathematical function for driving point impedance can be realised using real electrical components. Wilhelm Cauer (following on from R. M. Foster[7]) did much of the early work on what mathematical functions could be realised and in which filter topologies. The ubiquitous ladder topology of filter design is named after Cauer.[8]
There are a number of canonical forms of driving point impedance that can be used to express all (except the simplest) realisable impedances. The most well known ones are;[9]
- Cauer's first form of driving point impedance consists of a ladder of shunt capacitors and series inductors and is most useful for low-pass filters.
- Cauer's second form of driving point impedance consists of a ladder of series capacitors and shunt inductors and is most useful for high-pass filters.
- Foster's first form of driving point impedance consists of parallel connected LC resonators and is most useful for band-pass filters.
- Foster's second form of driving point impedance consists of series connected LC anti-resonators and is most useful for band-stop filters.
Prototype filters
-
Main article: Prototype filter
Prototype filters are used to make the process of filter design less labour intensive. The prototype is usually designed to be a low-pass filter of unity nominal impedance and unity cut-off frequency, although other schemes are possible. The full design calculations from the relevant mathematical functions and polynomials are carried out only once. The actual filter required is obtained by a process of scaling and transforming the prototype.[10]
Values of prototype elements are published in tables, one of the first being due to Sidney Darlington.[11] Both modern computing power and the practice of directly implementing filter transfer functions in the digital domain have largely rendered this practice obsolete.
A different prototype is required for each order of filter in each class. For those classes in which there is attenuation ripple, a different prototype is required for each value of ripple. The same prototype may be used to produce filters which have a different bandform from the prototype. For instance low-pass, high-pass, band-pass and band-stop filters can all be produced from the same prototype.[12]
See also
Notes
- ^ a b E. Cauer, p4
- ^ a b c Matthaei, pp83-84
- ^ a b Matthaei et al., pp85-108
- ^ Butterworth, S, "On the Theory of Filter Amplifiers", Wireless Engineer, vol. 7, 1930, pp. 536-541.
- ^ Mathaei, p95
- ^ Matthaei, pp108-113
- ^ Foster, R M, "A Reactance Theorem", Bell System Technical Journal, vol 3, pp259-267, 1924.
- ^ E. Cauer, p1
- ^ Darlington, S, "A history of network synthesis and filter theory for circuits composed of resistors, inductors, and capacitors", IEEE Trans. Circuits and Systems, vol 31, p6, 1984.
- ^ Matthaei, p83
- ^ Darlington, S, "Synthesis of Reactance 4-Poles Which Produce Prescribed Insertion Loss Characteristics", Jour. Math. and Phys., Vol 18, pp257-353, September 1939.
- ^ See Matthaei for examples.
References
-
- Matthaei, Young, Jones, Microwave Filters, Impedance-Matching Networks, and Coupling Structures, McGraw-Hill 1964.
- E. Cauer, W. Mathis, and R. Pauli, "Life and Work of Wilhelm Cauer (1900 – 1945)", Proceedings of the Fourteenth International Symposium of Mathematical Theory of Networks and Systems (MTNS2000), Perpignan, June, 2000. Retrieved online 19th September 2008.
Categories:- Linear filters
- Network synthesis filters
- Filter theory
- Analog circuits
- Electronics terms
- Electronic design

Wikimedia Foundation. 2010.