- Simple machine
-
This article is about the concept in physics. For the Internet forum software, see Simple Machines Forum.
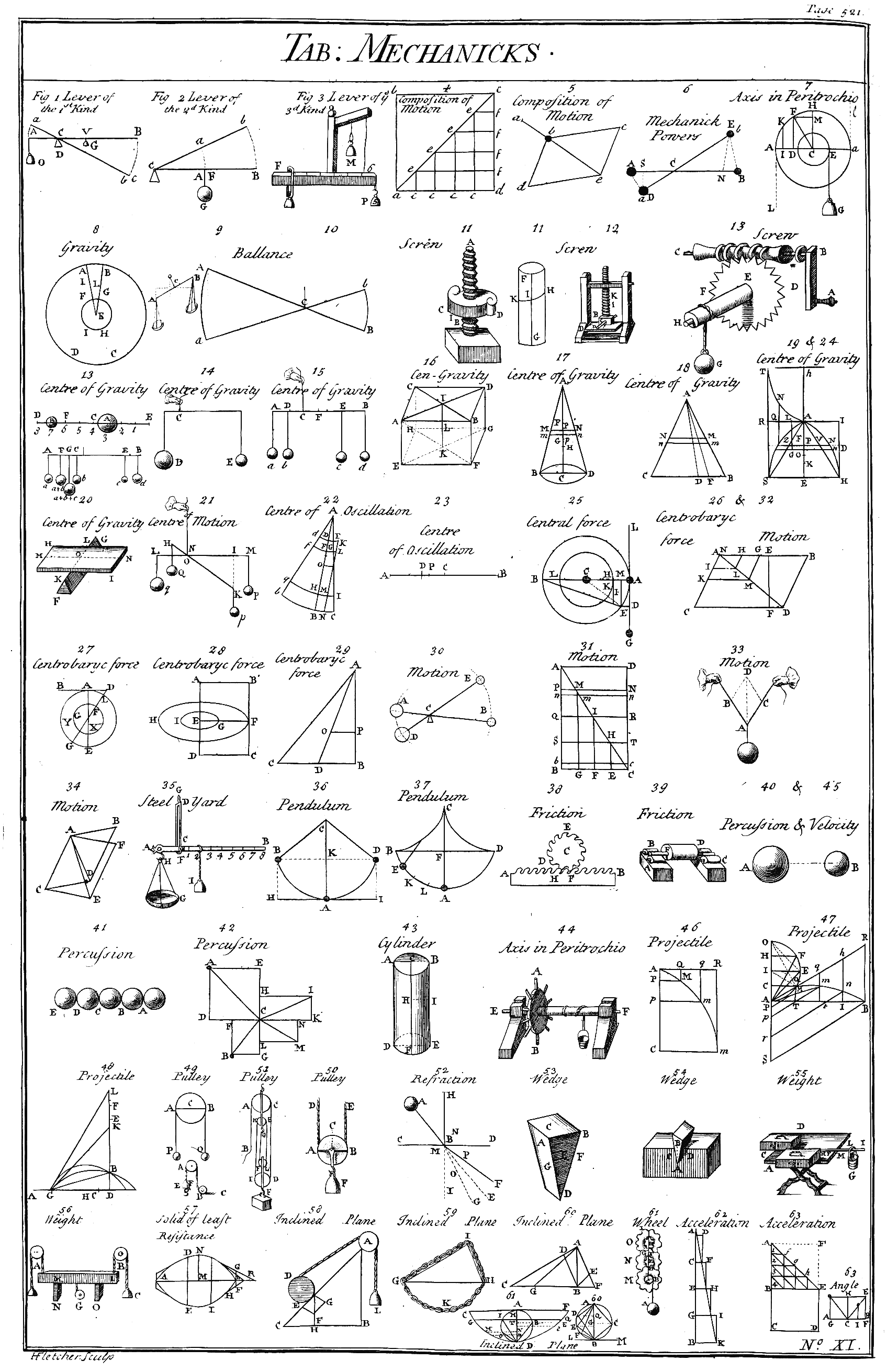
 Table of simple mechanisms, from Chambers' Cyclopedia, 1728.[1] Simple machines provide a "vocabulary" for understanding more complex machines.
Table of simple mechanisms, from Chambers' Cyclopedia, 1728.[1] Simple machines provide a "vocabulary" for understanding more complex machines.
A simple machine is a mechanical device that changes the direction or magnitude of a force.[2] In general, they can be defined as the simplest mechanisms that use mechanical advantage (also called leverage) to multiply force.[3] A simple machine uses a single applied force to do work against a single load force. Ignoring friction losses, the work done on the load is equal to the work done by the applied force. They can be used to increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load. The ratio of the output to the input force is called the mechanical advantage.
Usually the term refers to the six classical simple machines which were defined by Renaissance scientists:[4]
Simple machines are the elementary "building blocks" of which all more complicated machines (sometimes called "compound machines"[5]) are composed.[3][6] For example, wheels, levers, and pulleys are all used in the mechanism of a bicycle. The mechanical advantage of a compound machine is just the product of the mechanical advantages of the simple machines of which it is composed.
Simple machines fall into two classes; those dependent on the vector resolution of forces (inclined plane, wedge, screw) and those in which there is an equilibrium of torques (lever, pulley, wheel).
Contents
History
The idea of a "simple machine" originated with the Greek philosopher Archimedes around the 3rd century BC, who studied the "Archimedean" simple machines: lever, pulley, and screw.[3][7] He discovered the principle of mechanical advantage in the lever.[8] Later Greek philosophers defined the classic five simple machines (excluding the inclined plane) and were able to roughly calculate their mechanical advantage.[9] Heron of Alexandria (ca. 10–75 AD) in his work Mechanics lists five mechanisms that can "set a load in motion"; lever, windlass, pulley, wedge, and screw,[7] and describes their fabrication and uses.[10] However the Greeks' understanding was limited to the statics of simple machines; the balance of forces, and did not include dynamics; the tradeoff between force and distance, or the concept of work.
During the Renaissance the dynamics of the Mechanical Powers, as the simple machines were called, began to be studied from the standpoint of how much useful work they could perform, leading eventually to the new concept of mechanical work. In 1586 Flemish engineer Simon Stevin derived the mechanical advantage of the inclined plane, and it was included with the other simple machines. The complete dynamic theory of simple machines was worked out by Italian scientist Galileo Galilei in 1600 in Le Meccaniche ("On Mechanics").[11][12] He was the first to understand that simple machines do not create energy, only transform it.[11]
The classic rules of sliding friction in machines were discovered by Leonardo Da Vinci (1452–1519), but remained unpublished in his notebooks. They were rediscovered by Guillaume Amontons (1699) and were further developed by Charles-Augustin de Coulomb (1785).[13]
Alternate definitions
Any list of simple machines is somewhat arbitrary; the central idea is that every mechanism that manipulates force should be able to be understood as a combination of devices on the list. Some variations that have been proposed to the classical list of six simple machines:
- Some exclude the wedge from the list of simple machines, as it is a moving inclined plane.[3]
- The screw, being a helical inclined plane,[14] is sometimes also excluded.[15] This position is less accepted because a screw converts a rotational force (torque) to a linear force.
- It has been said that the pulley, and wheel and axle can be viewed as unique forms of levers, leaving only the lever and the inclined plane as simple machines from which all others can be derived.[16][17][18][19]
- Hydraulic systems can also provide amplification of force, so some say they should be added to the list.[18][20][21]
Frictionless analysis
Although each machine works differently, the way they function is similar mathematically. In each machine, a force
 is applied to the device at one point, and it does work moving a load,
is applied to the device at one point, and it does work moving a load,  at another point.[22] Although some machines only change the direction of the force, such as a stationary pulley, most machines multiply (or divide) the magnitude of the force by a factor, the mechanical advantage, that can be calculated from the machine's geometry. For example, the mechanical advantage of a lever is equal to the ratio of its lever arms.
at another point.[22] Although some machines only change the direction of the force, such as a stationary pulley, most machines multiply (or divide) the magnitude of the force by a factor, the mechanical advantage, that can be calculated from the machine's geometry. For example, the mechanical advantage of a lever is equal to the ratio of its lever arms.Simple machines do not contain a source of energy,[23] so they cannot do more work than they receive from the input force.[22] A simple machine with no friction or elasticity is called an ideal machine.[24] Due to conservation of energy, in an ideal simple machine, the work output
 (that is done on the load) is equal to the work input
(that is done on the load) is equal to the work input  (from the applied force). The work is defined as the force multiplied by the distance it moves. So the applied force, times the distance the input point moves,
(from the applied force). The work is defined as the force multiplied by the distance it moves. So the applied force, times the distance the input point moves,  , must be equal to the load force, times the distance the load moves,
, must be equal to the load force, times the distance the load moves,  [19]:
[19]:So the ratio of output to input force, the mechanical advantage, of a frictionless machine is equal to the "distance ratio"; the ratio of input distance to output distance moved:[22][24]
 (Ideal Mechanical Advantage)
(Ideal Mechanical Advantage)
In the screw, which uses rotational motion, the input force should be replaced by the torque, and the distance by the angle the shaft is turned.
Friction and efficiency
All actual machines have some friction. When friction is included, the mechanical advantage of a simple machine is no longer equal to the "distance ratio"
 but also depends on the machine's efficiency.[24][25][26][27] Due to conservation of energy, in a machine with friction all the work done on the machine by the input force, Win goes into either moving the load Wout or is dissipated as heat by friction Wfric.
but also depends on the machine's efficiency.[24][25][26][27] Due to conservation of energy, in a machine with friction all the work done on the machine by the input force, Win goes into either moving the load Wout or is dissipated as heat by friction Wfric.The efficiency η of a machine is a number between 0 and 1 defined as the ratio of output work to input work
Work is defined as the force multiplied by the distance moved, so
 and
and  , and thus
, and thus (Actual Mechanical Advantage)
(Actual Mechanical Advantage)
So in all practical machines, the mechanical advantage is always less than the distance ratio, and equal to the distance ratio din/dout multiplied by the efficiency η.[26][27] So a real machine, with friction, will not be able to move as large a load as a corresponding ideal frictionless machine using the same input force.
Self-locking machines
In many simple machines, if the load force Fout on the machine is high enough in relation to the input force Fin, the machine will move backwards, with the load force doing work on the input force.[28][29] So these machines can be used in either direction, with the driving force applied to either input point. For example, if the load force on a lever is high enough, the lever will move backwards, moving the input arm backwards against the input force. These are called "reversible", "non-locking" or "overhauling" machines, and the backward motion is called "overhauling". However in some machines, if the frictional forces are high enough, no amount of load force can move it backwards, even if the input force is zero. This is called a "self-locking", "nonreversible", or "non-overhauling" machine.[26][29] These machines can only be set in motion by a force at the input, and when the input force is removed will remain motionless, "locked" by friction at whatever position they were left.
Self-locking occurs mainly in those machines which have large areas of sliding contact and therefore large frictional losses: the screw, inclined plane, and wedge:
- The most common example is a screw. In most screws, applying torque to the shaft can cause it to turn, moving the shaft linearly to do work against a load, but no amount of axial load force against the shaft will cause it to turn backwards.
- In an inclined plane, a load can be pulled up the plane by a sideways input force, but if the plane is not too steep and there is enough friction between load and plane, when the input force is removed the load will remain motionless and will not slide down the plane, regardless of its weight.
- A wedge can be driven into a block of wood by force on the end, such as from hitting it with a sledge hammer, forcing the sides apart, but no amount of compression force from the wood walls will cause it to pop back out of the block.
A machine will be self-locking if and only if its efficiency η is below 50%:[26][29]
Whether a machine is self-locking depends on both the friction forces (coefficient of static friction) between its parts, and the distance ratio din/dout (ideal mechanical advantage). If both the friction and ideal mechanical advantage are high enough, it will self-lock.
Derivation
When a machine moves in the forward direction from point 1 to point 2, with the input force doing work on a load force, from conservation of energy[30][31]
When it moves backward from point 2 to point 1 with the load force doing work on the input force, the work lost to friction Wfric is the same
When the input force is removed, the machine will self-lock if the work dissipated in friction is greater than the work done by the load force moving it backwards
From (1)
Compound machines
A compound machine is a machine made up of a number of simple machines connected in series, with the output force of each providing the input force for the next. For example a bench vise consists of a lever (the vise's handle) in series with a screw, and a car's transmission consists of a number of gears (wheels and axles) in series. The mechanical advantage of the compound machine MAcompound is defined as the output force applied to the load by the last machine, divided by the input force applied to the first machine. As the force propagates through the machine, each simple machine scales the force by its own mechanical advantage, so the mechanical advantage of the compound machine is equal to the product of the mechanical advantages of each simple machine of which it is composed
Proof:
Since the output force of each machine is the input of the next:
 , so
, soSimilarly, the efficiency of the compound machine is equal to the product of the efficiencies of the simple machines
References
- ^ Table of Mechanicks, from Ephraim Chambers (1728) Cyclopaedia, A Useful Dictionary of Arts and Sciences, Vol. 2, London, p.528, Plate 11.
- ^ Paul, Akshoy; Pijush Roy, Sanchayan Mukherjee (2005). Mechanical Sciences:Engineering Mechanics and Strength of Materials. Prentice Hall of India. p. 215. ISBN 8120326113. http://www.mtsu.edu/~pdlee/public2_html/simple_machines.html#sm#5.
- ^ a b c d Asimov, Isaac (1988). Understanding Physics. New York: Barnes & Noble. p. 88. ISBN 0880292512. http://books.google.com/books?id=pSKvaLV6zkcC&pg=PA88&dq=Asimov+simple+machine&cd=1#v=onepage&q&f=false.
- ^ Anderson, William Ballantyne (1914). Physics for Technical Students: Mechanics and Heat. New York, USA: McGraw Hill. pp. 112–122. http://books.google.com/books?id=Pa0IAAAAIAAJ&pg=PA112. Retrieved 2008-05-11.
- ^ "Compound Machines". University of Virginia Physics Department. http://galileo.phys.virginia.edu/outreach/8thgradesol/compoundmachine.htm. Retrieved 11 June 2010.
- ^ Wallenstein, Andrew (June 2002). "Foundations of cognitive support: Toward abstract patterns of usefulness". Proceedings of the 9th Annual Workshop on the Design, Specification, and Verification of Interactive Systems. Springer. p. 136. http://books.google.com/books?id=G9sZf7D24a8C&pg=PA136&vq=simple+machines&source=gbs_search_r&cad=1_1&sig=dynXLdHrC2AX55hDds_zGQRJv_U. Retrieved 2008-05-21.
- ^ a b Chiu, Y.C. Chiu (2010). An introduction to the History of Project Management. Delft: Eburon Academic Publishers. pp. 42. ISBN 9059724372. http://books.google.com/books?id=osNrPO3ivZoC&pg=PA42&dq=%22heron+of+alexandria%22++load+motion#v=onepage&q=%22heron%20of%20alexandria%22%20%20load%20motion&f=false.
- ^ Ostdiek, Vern; Bord, Donald (2005). Inquiry into Physics. Thompson Brooks/Cole. p. 123. ISBN 0534491685. http://books.google.com/books?id=7kz2pd14hPUC&pg=PA123. Retrieved 2008-05-22.
- ^ Usher, Abbott Payson (1988). A History of Mechanical Inventions. USA: Courier Dover Publications. pp. 98. ISBN 048625593X. http://books.google.com/books?id=xuDDqqa8FlwC&pg=PA196#v=snippet&q=wedge%20and%20screw&f=false.
- ^ Strizhak, Viktor; Igor Penkov, Toivo Pappel (2004). "Evolution of design, use, and strength calculations of screw threads and threaded joints". HMM2004 International Symposium on History of Machines and Mechanisms. Kluwer Academic publishers. p. 245. ISBN 1402022034. http://books.google.com/books?id=FqZvlMnjqY0C&printsec=frontcover&dq=%22archimedean+simple+machine%22&source=gbs_summary_r&cad=0. Retrieved 2008-05-21.
- ^ a b Krebs, Robert E. (2004). Groundbreaking Experiments, Inventions, and Discoveries of the Middle Ages. Greenwood Publishing Group. p. 163. ISBN 0313324336. http://books.google.com/books?id=MTXdplfiz-cC&pg=PA163&dq=%22mechanics+Galileo+analyzed%22#v=onepage&q=%22mechanics%20Galileo%20analyzed%22&f=false. Retrieved 2008-05-21.
- ^ Stephen, Donald; Lowell Cardwell (2001). Wheels, clocks, and rockets: a history of technology. USA: W. W. Norton & Company. pp. 85–87. ISBN 0393321754. http://books.google.com/books?id=BSfpFLV1nkAC&pg=PA86&dq=%22simple+machine%22+galileo#v=onepage&q=%22simple%20machine%22%20galileo&f=false.
- ^ Armstrong-Hélouvry, Brian (1991). Control of machines with friction. USA: Springer. pp. 10. ISBN 0792391330. http://books.google.com/books?id=0zk_zI3xACgC&pg=PA10&dq=friction+leonardo+da+vinci+amontons+coulomb#v=onepage&q=friction%20leonardo%20da%20vinci%20amontons%20coulomb&f=false.
- ^ Simple machine elements: The screw is basically an inclined plane wrapped around a cylinder
- ^ Carhart, Henry S.; Chute, Horatio N. (1917). Physics with Applications. Allyn & Bacom. pp. 159–160. http://books.google.com/books?id=4T0AAAAAYAAJ&pg=RA1-PA160. Retrieved 2008-05-20.
- ^ Isbell, Pam (2001). "Simple machines, or are they?". Grade 5–7 lesson plan. 2001 National Teacher Training Institute. http://www.myetv.org/education/ntti/lessons/2001_lessons/simplemachines.cfm. Retrieved 2008-05-13.
- ^ Clute, Willard N. (1917). Experimental General Science. Philadelphia: P. Blakiston's Son & Co.. pp. 188. http://books.google.com/books?id=OuFHAAAAIAAJ&pg=PA188. Retrieved 2008-05-20.
- ^ a b "Mechanical Advantage and Simple Machines". BNET Business Network. CNET. 2002. http://findarticles.com/p/articles/mi_gx5226/is_2002/ai_n19143765/pg_1. Retrieved 2008-05-21.
- ^ a b Beiser, Arthur (2004). Schaum's Outline of Applied Physics. McGraw-Hill. p. 145. ISBN 0071426116. http://books.google.com/books?id=soKguvJDgmsC&dq=Hydraulic+%22simple+machines%22&cad=0. Retrieved 2008-05-21.
- ^ This was first suggested by Blaise Pascal in the 17th century: Meli, Domenico Bertolini (2006). Thinking with Objects:The Transformation of Mechanics in the 17th Century. JHU Press. ISBN 0801884276. http://books.google.com/books?id=qbS_0qAB3_cC&dq=Hydraulic+%22simple+machines%22&cad=0. p.175
- ^ "Mechanical Advantage - Simple Machines". MCAT Exam preparation. Eduturca. January 7, 2008. http://www.eduturca.com/mcat-exam/mechanical-advantage-simple-machines-mcat.html. Retrieved 2008-05-21.
- ^ a b c Bhatnagar, V. P. (1996). A Complete Course in Certificate Physics. India: Pitambar Publishing. pp. 28–30. ISBN 8120908686. http://books.google.com/books?id=pb45yhuNltEC&pg=PA28&dq=%22simple+machine%22+%22mechanical+advantage%22#v=onepage&q=%22simple%20machine%22%20%22&f=false.
- ^ Simmons, Ron; Cindy Barden (2008). Discover! Work & Machines. USA: Milliken Publishing. pp. 29. ISBN 1429109475. http://books.google.com/books?id=geddKUGjI3cC&pg=PA30&dq=%22simple+machine%22+%22mechanical+advantage%22#v=onepage&q=%22simple%20machine%22%20%22mechanical%20advantage%22&f=false.
- ^ a b c Gujral, I.S. (2005). Engineering Mechanics. Firewall Media. pp. 378–380. ISBN 8170086361. http://books.google.com/books?id=JM0OG-XUyu0C&pg=PA382&dq=%22simple+machine%22+self-locking#v=onepage&q=%22simple%20machine%22%20self-locking&f=false.
- ^ Rajput, R.K. (2005). Elements of Mechanical Engineering. Firewall Media. pp. 389–392. ISBN 8170086361. http://books.google.com/books?id=CtT0fzwkMvUC&pg=PA389&dq=%22simple+machine%22+screw+efficiency#v=onepage&q=%22simple%20machine%22%20scr&f=false.
- ^ a b c d Darbyshire, Alan (2003). Mechanical engineering: BTEC national option units. Elsevier. pp. 58–59. ISBN 0750657618. http://books.google.com/books?id=fzfXLGpElZ0C&pg=PA68&dq=%22simple+machine%22+screw+efficiency#v=onepage&q=%22simple%20machine%22%20scr&f=false.
- ^ a b Dingle, Lloyd; Michael H. Tooley (2005). Aircraft Engineering Principles. UK: Butterworth-Heinemann. pp. 234–235. ISBN 075065015X. http://books.google.com/books?id=4GlgOUYnut8C&pg=PA237&dq=%22simple+machine%22+screw+efficiency#v=onepage&q=%22simple%20machine%22%20scr&f=false.
- ^ Darbyshire, Alan (2003). Mechanical engineering: BTEC national option units. Elsevier. pp. 68. ISBN 0750657618. http://books.google.com/books?id=fzfXLGpElZ0C&pg=PA68&dq=%22simple+machine%22+screw+efficiency#v=onepage&q=%22simple%20machine%22%20scr&f=false.
- ^ a b c Gujral, I.S. (2005). Engineering Mechanics. Firewall Media. pp. 382. ISBN 8170086361. http://books.google.com/books?id=JM0OG-XUyu0C&pg=PA382&dq=%22simple+machine%22+self-locking#v=onepage&q=%22simple%20machine%22%20self-locking&f=false.
- ^ Rao, S.; R. Durgaiah (2005). Engineering Mechanics. Universities Press. pp. 82. ISBN 8173715432. http://books.google.com/books?id=vRR4FKAkJl4C&pg=PA80&dq=%22simple+machine%22+%22mechanical+advantage%22#v=onepage&q=%22simple%20machine%22%20%22&f=false.
- ^ Goyal, M. C.; G. S. Raghuvanshi (2009). Engineering Mechanics. New Delhi: PHI Learning Private Ltd.. pp. 202. ISBN 8120337891. http://books.google.com/books?id=vRR4FKAkJl4C&pg=PA82#v=onepage&q&f=false.
Categories:


















Wikimedia Foundation. 2010.