- Ultralight trike
-
An ultralight trike, also known as a flex-wing trike, weight-shift control aircraft, microlight trike, deltatrike[1] or motorized deltaplane,[2] is a type of powered hang glider using a high performance Rogallo wing coupled to a propeller-powered three-wheeled undercarriage. While many powered aircraft have three-wheeled landing gear, the term "trike" refers specifically to the form of aircraft described here. The principles of this page can generally be applied to the single place ultralight trike and the two place weight-shift control light-sport aircraft.

Contents
Control
Flight control in a trike is by weight-shift.[3] This is similar to controlling a hang glider, in which the aviator or pilot is suspended from the wing made from high-strength aluminium and fabric. The pilot controls the attitude of the wing by changing the aircraft centre of gravity - this is through pushing, pulling, and turning a frame (generally triangular) connected to the wing.
For instance, pushing the bar forward causes the center of gravity to move back. As a result the nose of the aircraft pitchs up, increasing the angle of attack and as a result the aircraft to flies slower. In contrast, pushing forward on the control stick of a traditional aircraft would cause that aircraft to dive.
 Detail of a Mainair Blade ultralight trike (in 2009)
Detail of a Mainair Blade ultralight trike (in 2009)
Turns are accomplished by rolling the wing in the direction of the intended turn. This is accomplished by moving the control bar to the left in order to enter a right hand turn. This causes the center of gravity—represented primarily by the weight of the undercarriage and pilot—to shift in the direction of the intended turn. This in itself does not cause the aircraft to turn, but it does cause the aircraft to bank, or tip, to the side. Some adverse yaw is also initially produced, which is soon damped by the natural yaw stability of the wing.
A banking maneuver becomes a turn because of the natural yaw stability of the wing. When a roll is applied, the aircraft begins to side slip towards the lower wing. Since the wing is yaw stable, a yaw is set up in the direction of the bank, thus coordinating the turn. A small anhedral effect may be built into the wing to aid roll response, where the side slip causes increased banking.
This is similar to the way in which a hang glider is controlled. In fact, trikes are essentially propeller-powered hang gliders with seats and wheels. Trikes have often employed wings designed for hang gliding; the Rogallo-winged trike Paresev 1B of NASA's 1960s experiments and Barry Hill Palmer's trike (Fleep inspired) modeled the wing that has evolved to contemporary trike wings. As weight and performance goals have increased purpose-built wings have become more commonplace. They are now long distance cross country machines as shown by record-breaking flights that echo the exploits of fixed-wing aviators in the 1920s and 1930s, e.g., the circumnavigation of the world.
Stability and equilibrium

Because trikes are most often used for recreational flying by part time pilots, a premium is placed on gentle behavior especially at the stall, natural pitch stability, and ease-of-operation.
Unlike a traditional aircraft with an extended fuselage and empennage for maintaining stability, trikes rely on the natural stability of their wings to return to equilibrium in yaw and pitch. Roll stability is generally set up to be near neutral. In calm air, a properly designed wing will maintain balanced trimmed flight though a slow spiral may build up in either direction.
In roll most trikes are set up with near-neutral roll due to side slip (some slightly negative, some slightly positive) and also near neutral spiral stability, often mildly unstable. Moderate negative roll due to side slip (anhedral effect) can be built in to improve roll response by weight shift.
The yaw axis, which represents the direction that the aircraft is facing relative to the wind, is stabilized through the sweep of the wings. Instead of having wings that extend almost straight out side-to-side as in many types of traditional light aircraft, trikes are provided with a swept back wing planform. The swept planform, when yawed out of the relative wind, creates more lift on the advancing wing and also more drag. The differential drag stabilizes the wing in yaw. The differential lift causes positive roll due to sideslip like dihedral would. Too much dihedral effect is undesirable because it opposes weight shift roll response; the aircraft will be too stable and won't manoeuver. The lateral and directional stability of the swept wing is proportional to angle of attack - at high speed, yaw and roll instability can become unacceptable, giving Dutch roll or wing walking oscillations. This is the primary reason for over sized rear undercarriage spats and wing lets on recent high performance machines.
Thus, if one wing advances ahead of the other it presents more area to the wind and causes more drag on that side. This causes the advancing wing to go slower and to fall back. The wing is at equilibrium when the aircraft is traveling straight and both wings present the same amount of area to the wind.
The third axis, represented by pitch, is also stabilized by the sweep of the wings. A combination of high lift airfoils with moderate pitching moment such as the UI 1720 and washout (tip trailing edge upwards twist) caused by loading of the sail produces a positive pitching tendency in the wing where increasing airspeed causes increasing pitch-up. The wing centre of gravity is close to the trike hang point and is located forward of the mean aerodynamic center of the wing at a distance known as the static margin. Therefore at some speed, called the trim speed, the positive pitching of the wing is balanced by the nose down moment caused by the aircraft weight times the static margin. At the trim speed the wing will fly hands off and return to trim when disturbed. The weight shift control system only works when the wing is positively loaded. A combination of very steep nose-up pitch attitude and very low airspeed is very hazardous because of the probability of a tail slide and violent nose down pitch rotation into an irrecoverable tumble. This is the primary area of the flight envelope trike pilots must always avoid.
 Pegasus Quantum 145-912 ultralight trike
Pegasus Quantum 145-912 ultralight trikeWhen the lift load is removed from the sail the washout disappears and the aircraft would not recover from a vertical dive or may even tuck upside down. To maintain a minimum safe amount of washout when the wing is unloaded or even negatively loaded, positive pitching devices such as reflex lines or washout rods are employed. These systems are normally tested by a truck based aerodynamic test.
There is no "pendulum" wing stabilizing effect of the trike at the trim speed because the trike is freely suspended in the pitch and roll axes. To fly at other speeds, the pilot applies a pitching moment to the wing by levering the trike mass around using the control bar connected directly to the wing. The bar is pushed on to rotate the wing more nose-up and so fly slower, vice-versa for high speed. A properly designed trike will always require increasing pilot force to be applied each side of the trim speed.
The free suspension of the trike means that the center of gravity (CG) position of the trike only affects the trike attitude and control range, not the hands off trim speed. From the pilot's point of view only the load carried has to remain within the aircraft limitations, no complicated CG calculations are required and it is nearly impossible to mis-load the aircraft, adding to the simplicity of operation. One great advantage of weight shift pitch apart from simplicity is that the wing lifting performance is not compromised by up elevon deflection as required for an aerodynamically controlled tailless machine, hence a lower landing speed can be achieved. Additionally, with a pitch stable wing it is also nearly impossible to overspeed the aircraft because it will simply trim in pitch at a limited speed with the bar held fully back.
Pitch control response is very direct, but satisfactory weight shift roll response becomes more difficult to achieve as the sail is tightened to improve performance. In the roll axis, the pilot, using the wing control bar and reacting his input by the mass of the trike, applies a rolling moment directly to the wing. The wing is built to flex differentially across the span in response to the pilot applied roll moment. For example, under a right roll input, the right wing trailing edge flexes up more than the left, allowing the right wing to drop. Special features are built in such as a floating keel, four-bar control frame linkage to get a longer effective control frame height, keel pocket - all to ease roll response. Judicious use of anhedral improves roll response by converting the adverse yaw generated by the roll input into a pro-roll bank. Too much anhedral can cause instability in roll at high speeds.
Furthermore, the fact that the wing is designed to bend and flex in the wind provides favorable dynamics analogous to a spring suspension. This allows the wing to be less susceptible to turbulence and provides a gentler flying experience than a similarly sized rigid-winged aircraft.
Engine placement
Because trikes do not require an empennage, the space directly behind the pilot is used to mount the engine and propeller. Engines range from between 25-40 hp for single-seaters and 50-100 hp for two-seaters. An aft engine placement allows exhaust to stay behind the pilot and enhances visibility. It also means that the turbulent vortex of air behind the propeller is not coming in contact with the wing.
History
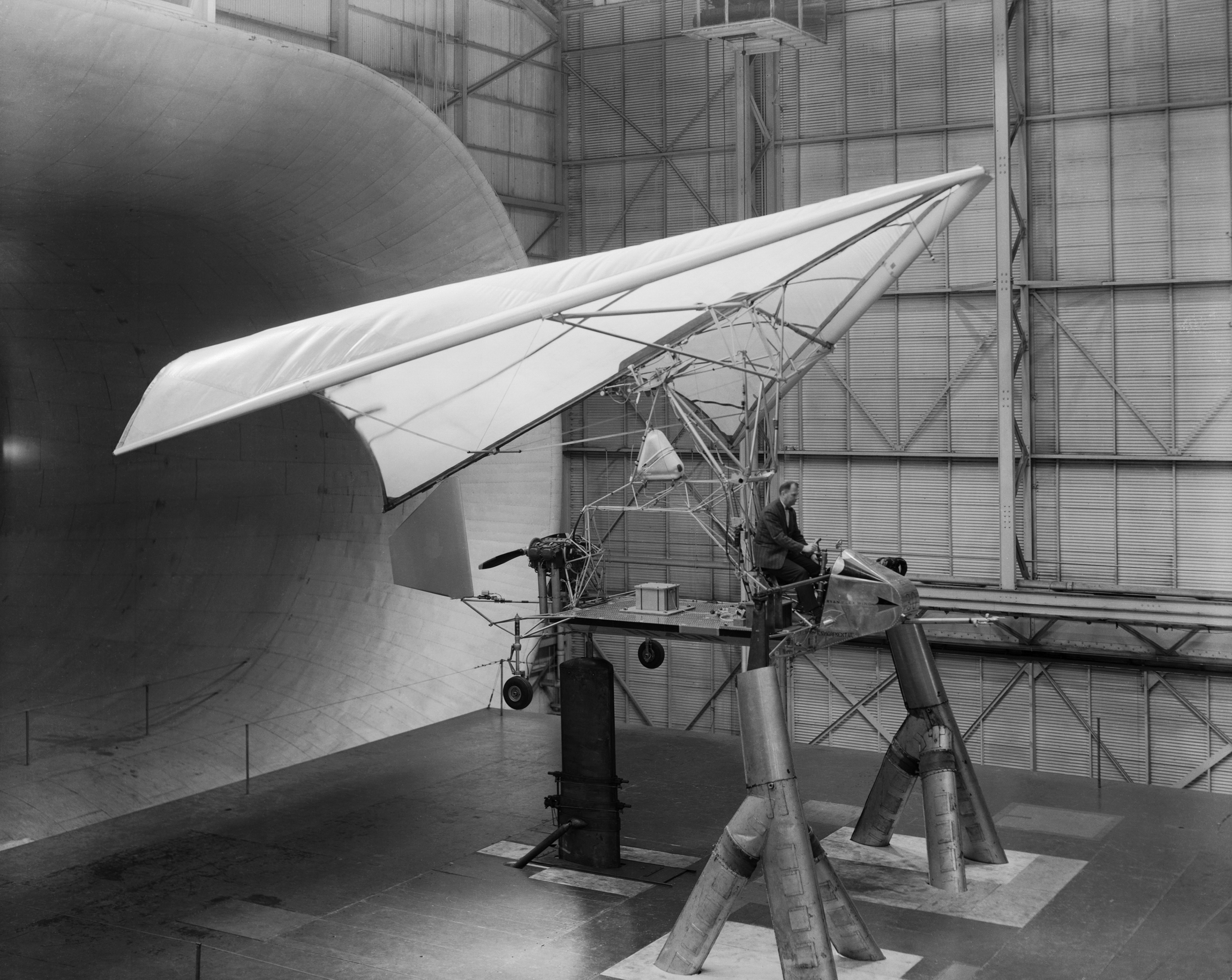
 First towing tests of NASA's Paresev glider (Para Wing Research Vehicle), March 1962.
First towing tests of NASA's Paresev glider (Para Wing Research Vehicle), March 1962.

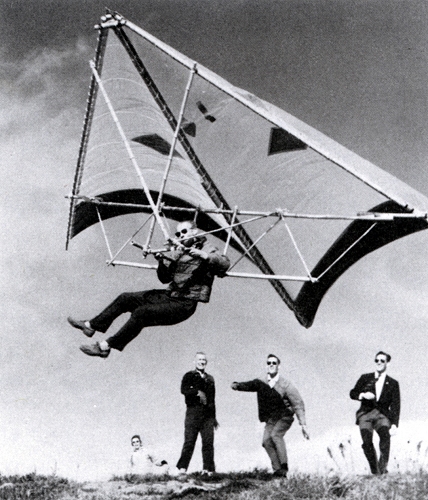
 'Standard' flexible wing hang glider, based on variants of the Rogallo wing aircraft, 1975.
'Standard' flexible wing hang glider, based on variants of the Rogallo wing aircraft, 1975.Trikes are referred to as "microlights" in Europe and have been extremely popular since the 1980s. The history of the trike is traced back to the invention by Francis Rogallo's flexible wing and subsequent development by the Paresev engineering team's innovations and then others. On 1948, engineer Francis Rogallo invented a self-inflating wing which he patented on March 20, 1951 [4] as the Flexible wing. It was on October 4, 1957 when the Russian satellite Sputnik shocked the United States and the space race caught the imagination of its government, causing major increases in U.S. government spending on scientific research, education and on the immediate creation of NASA. Rogallo was in position to seize the opportunity and released his patent to the government and with his help at the wind tunnels, NASA began a series of experiments testing Rogallo's wing -which was renamed Para Wing- in order to evaluate it as a recovery system for the Gemini space capsules and recovery of used Saturn rocket stages.[5][6] F. Rogallo's team adapted and extended the totally flexible principle into semi-rigid variants. This mainly involved stabilizing the leading edges with compressed air beams or rigid structures like aluminum tubes. By 1960 NASA had already made test flights of a heavily framed cargo powered aircraft called the Ryan XV-8 or Fleep (short for 'Flying Jeep')[7] and by March 1962, of a weight-shift experimental glider called Paresev. By 1967 all Para Wing projects were dropped by NASA in favor of using round parachutes without officially considering development of personal ultralight gliders, but the airfoil's simplicity of design and ease of construction, along with its capability of slow flight and its gentle landing characteristics, did not go unnoticed by hang glider enthusiasts. The challenge then, was to modify and fit a Rogallo flexible wing with an appropriate frame to allow it to be used as a hang glider.
Some modern Rogallo flexible winged aircraft
A crucial development toward the trike was the severe mechanical innovations developed by the Paresev and the Fleep engineers; they proved the Rogallo wing for free-flight gliding, powered and unpowered, for safe landing.
Publicity from the Fleep[8] and the Paresev tests sparked interest in the design among several tinkerers, first through Barry Palmer. An engineer, Mike Burns of Australia, developed and used the boat-towed Rogallo airfoiled SkiPlane from 1962 through the 1960s. A fellow countryman of Mike Burns, John W. Dickenson, made ski-kites and eventually partnered with Mike Burns to improve the ski-kite; he formatted a ski-kite that used what could be found in the 1929 George A. Spratt simple triangle control bar or A-frame with single-point pendulum weight-shift control.
An influence through John Dickenson's duplication of his device,[9][10] who named his flexible wing ski-kite the Ski Wing.[11] Dickenson fashioned a water ski kite airframe to fit on a Rogallo airfoil [10][12][13][14] where the pilot sat on a swinging seat while the control frame and wire bracing distributes the load to the wing as well as giving a frame to push/pull for weight-shift control.[15] Dickenson's Ski Wing turned out to be stable and controllable under tow,[16] unlike the flat manned kites used at water ski shows. The Ski Wing kite was first kited in public at the Grafton Jacaranda Festival in September 1963 by Rod Fuller while towed behind a motorboat. Australian manufacturers like Bill Bennett[17] and Bill Moyes,[18][19] actively developed and marketed Dickenson's innovations[20] to the world, which significantly fueled the hang glider revolution.
Although by the early 1970s many rigid wings were developed, none sold well, while dozens of flexible wing hang glider companies were springing up world-wide, building variants of Dickenson's Ski Wing. In 1972, Popular Mechanics and Popular Science magazines published articles on hang gliding which further increased its popularity,[21] as the Sky Raiders hang gliding movie released in 1975.[22]
Francis Rogallo, Barry Palmer, John Dickenson, and others never made any money out of their innovations.[10][23] Profit to manufacturers of hang gliders and Rogallo winged hang gliders came once organized and insured sporting events grew in popularity. Dickenson's adaptation and innovations eventually produced a foldable hang glider that dramatically reduced difficulty in control, storage, transport, assembly and repair. In addition, the flexible wing lends itself open to design changes for possible improvements.[24] The crucial developments put together by the Paresev engineers, Barry Palmer, John Dickenson, Bill Bennett, Bill Moyes, Richard Miller, and then hundreds of other innovators gave success to the flexible wing hang glider.[25]
First trikes

 Pierre Aubert, Switzerland, 1964
Pierre Aubert, Switzerland, 1964In 1961, Engineer Thomas Purcell built a towable Rogallo wing glider with an aluminum frame, wheels, a seat and basic control rods; soon he replaced the wheels for floats and motorized the aircraft.[26] In 1964, Swiss inventor Pierre Aubert saw a photo of NASA's Fleep and completed construction of a similar trike. Like with the Fleep, his Rogallo wing was fixed and did not allow for pendulum weight-shift control.[27]
In March 1967 aeronautical engineer Barry Palmer completed the earliest example of a true weight-shift powered trike: the Paraplane;[28][29] it was controlled by a single vertical control bar as the Paresev experimental glider that inspired him. The Paraplane used two West Bend-Chrysler 820 engines of 8 hp at 6000rpm, reduced to 4700rpm for about 6.5 hp each, for a total of 13 hp. Each engine had a direct drive to a 27in diameter two-blade propeller made of polyester and fiberglass. On March 24, 1967 Palmer registered the trike at the American FAA as the Palmer Parawing D-6, serial 1A, N7144; no restrictions were noted. The second Palmer trike, Skyhook (FAA registered N4411) in spite of its early date of origin, had most of the attributes of a modern ultralight, except it used a single cylinder snowmobile engine, as the two-stroke twin cylinders were not available yet. It was powered by a 17 hp at 5000rpm single cylinder JLO L297 two stroke engine, driving a composite propeller designed and built by Palmer himself and driven by a 2.1/1 reduction gearbox. The engine had electric start and the craft had fiberglass composite spring landing gear. Airframe construction was bolted 6061-T6 aluminum thin wall tube, with 6061 T-6 extruded angle. The craft took off, flew, and landed at around 30 mph.[30] Palmer's trikes were not developed further and remained in obscurity.
The commercial availability of Dikenson's hang glider made the Rogallo wing very popular, and prompted several builders during the 1970s to attempt motorization of their flexible wing aircraft [31] but unlike Barry Palmer -who placed the center of gravity well below the keel- most builders were mounting the engine to the wing, where a fine balance existed between applying too much power, causing the aircraft to overtake the pilot or not enough power for flight. It was not until Roland Magallon took a long look at the Motodelta ultralight [32] (a hybrid Rogallo wing designed by Jean-Marc Geiser had a 'fuselage' and rudder) and Magallon decided replace the Motodelta's 'fuselage' with a simple tubular framework pendulum and dispensing with the rudder.[33] Magallon is thus generally thought to have invented the trike because it was he who first marketed it. He called the first version 'Mosquito' and marketed it from October 1979 through 1981. The prototype had flown with a McCulloch MC-101A motor of 125 cc, delivering 10 hp at 8000 rpm to a direct-drive prop with ground adjustable pitch. Later he offered it with a Solo 210 engine which produced 15 hp (11 kW) at much less frantic RPM.[34]
The "trike", as it soon became known, quickly became popular in the UK and France where it had been reborn. Trike technology still shows its hang gliding origins, though the wings are no longer converted hang gliders, but are designed for power. In fact, none of the commercially available trike wings can be used as foot-launched hang gliders as they are too heavy and too fast.[35]
Regulation
In the United States, trikes are often referred to as "ultralight trikes" and are designed to operate under the designation of the Federal Aviation Regulations (FAR 103) that define an ultralight as a single seat vehicle with under 5 US gallons (19 L) of fuel capacity, an empty weight of less than 254 pounds (115 kg), a top speed of 55 knots (102 km/h), and a maximum stall speed that does not exceed 24 knots (45 km/h). Ultralights are only allowed to operate during daylight hours. FAR 103 makes further weight allowances for two-seat trainers(in which both persons are able to control the craft and thus definable as pilots), amphibious landing gear, and ballistic parachute systems.
A light sport aircraft (LSA) certification code has been produced for heavier and higher performance machines. This is an airworthiness code based on a consensus of industry experts, drawing from many years experience including the British BCAR-S requirements. The LSA initiative also includes similar consensus-based pilot licencing and maintenance requirements. It is proving popular, enabling more people to fly modern designs safely. Trike pilots may also obtain the private pilot certificate which permits them to fly at night, above 10,000 feet, and in other venues not permissible for ultralight or sport pilots.
Popularity
 Two ultralight trikes ready for take-off at the Aerosport airshow 2011
Two ultralight trikes ready for take-off at the Aerosport airshow 2011Due to their relatively low cost, low fuel consumption, light weight, ability to take off and land in very short distances, and ability to fly in somewhat turbulent conditions, trikes have become popular with recreational pilots. In particular, trikes have been used to fly across oceans, frozen tundra, barren deserts, and even into backyard landing strips. As with all types of aviation, regulations in the United States dictate where and how these aircraft are allowed to fly, especially with regard to avoiding other air traffic and populated areas. Notwithstanding, trikes continue to grow in popularity with those living in urban areas due to their portable nature and rapid assembly time. Most trikes may be transported on a very small trailer, stored in a standard garage, and assembled for flight in less than thirty minutes.
Manufacturers
There are around 56 manufacturers world-wide that build trikes.[citation needed] Some started out making hang glider wings and now provide both wing and undercarriage. Many produce only the undercarriage and procure their wings elsewhere. The majority of these companies are found in Europe with a number appearing in the United States. Manufacturers can also be found in India, South Africa, Australia, and elsewhere. At their most basic, manufacturers often sell single-place ultralight trikes at a price of around $5000–10000[36] Prices often depend on whether the wing is included. Two-person, high-performance trikes may cost from $15000-30000 and up. For instance, the two-seater Tanarg by AirCreation, can cost up-to $85000 when loaded with every available performance option.[37]
Records
On January 19, 2008 Mark Jackson from Altrincham, UK, flew over Kilimanjaro. In doing so he broke the record for the highest altitude attained in a microlight (24,262 feet) and the fastest climb to 20,000 feet (25 minutes). He also broke the British record for the fastest climb to 10,000 feet (19 minutes). He did the flight with Eve Jackson.[38]
See also
- Paragliding
- Hang gliding
- Powered hang glider
- Powered paraglider
- Ultralight aviation
- Ultralight aircraft (United States)
References
- ^ Deltacat ULM AVIATION: deltatrike
- ^ Motorized Delta plane term
- ^ Weight-Shift Control Aircraft Flying Handbook
- ^ Article: How to Fly Without a Plane by Robert Zimmerman, aerospace writer. [1]
- ^ SPACEFLIGHT REVOLUTION
- ^ On 1965 Jack Swigert, who would later be one of the Apollo 13 astronauts, softly landed a full-scale Gemini capsule using a Para Wing stiffened with inflatable tubes along the wing’s edges
- ^ The earliest photographic press release of a Rogallo flexible wing in record dates to August 14, 1961 by 'Aviation Week and Space Technology' magazine.
- ^ Press release of the XV-8 'Fleep': August 14, 1961 by Aviation Week and Space Technology magazine.
- ^ The Smithsonian National Air & Space Museum'
- ^ a b c Dickenson built a model based on the 'flexile wing' principle with a single hang point on an A-frame:[2]
- ^ Ski Wing
- ^ Article by Mark Woodhams, British Columbia Hang Gliding and Paragliding Association: [3]
- ^ Western Museum of Flight
- ^ The Australian Ultralight Federation -History
- ^ The swinging seat and control frame are two key control elements J. Dickenson 'imported' from ski kites into his successful Ski Wing kite/hang glider.
- ^ Stability and weight-shift control are flex-wing characteristics previously established and described by its inventor F. Rogallo and by NASA engineers in the Paresev and Fleep programs.
- ^ Bill Moyes Contributions by Bill Bennet as explained by the 'Smithsonian National Air & Space Museum': Delta Wing Phoenix VI [4], Delta Wing Phoenix VI:[5], Delta Wing Phoenix Mariah M-9: [6], Delta Wing Model 162: [7], Delta Wing Phoenix Viper 175: [8], Delta Wing Streak 130: [9].
- ^ Moyes' story: [10], The History of Moyes: [11]
- ^ ABC History -an interview with Moyes
- ^ On October/11/1963 Dickenson filed for a patent, and a provisional protection was awarded for his application number 36189/63 but the patent was not finally awarded; the claims were not officially reviewed for priority and validity. [12]
- ^ Hang gliding articles on Popular Mechanics and Popular Science magazines: [13]
- ^ The Swallowtail hang glider was featured in the 1976 movie Sky Riders (filmed in Greece during 1975) starring James Coburn, Robert Culp, Susannah York, and Charles Aznavour. After filming of the action was complete, the Wills Wing team toured Europe and stopped by in England to win the British Championships at Mere, Wiltshire, in August 1975.
- ^ Article by Mark Woodhams
- ^ Some modifications done to the Rogallo winged aircraft in order to change performance characteristics while remaining light and portable: Trailing luff (anti-dive) lines. 1974 - 1976: Increased nose angle. Deflexor cables mounted on the leading edges to stiffen and curve the wing for better flying performance and increased stability. 1977 - 1979: Multiple deflexors. 1978 - 1980: Enclosed keel and tip rods. 1980 - 1997: Preformed battens to shape wing camber. Floating cross bar. Cross bar enclosed within double surface (upper and lower wing skins). Variable wing geometry (VG). 1997 - to date: Topless (without king post).
- ^ "Order of Australia" award for contributions to aviation given in 1996
- ^ Thomas Pourcell
- ^ Pierre Aubert
- ^ Palmer's trike
- ^ Original video loaded in YouTube
- ^ Palmer's web site
- ^ Some early powered hang gliders
- ^ Motodelta - images
- ^ Rolland Magallon
- ^ Roland Magallon's trike
- ^ Aerial Pursuits
- ^ UL trikes general pricing
- ^ Tanarg Pricing
- ^ MEN news
Categories:- Ultralight aircraft
- Delta-wing aircraft
- Pusher aircraft
- Aeronautics
- Air sports










Wikimedia Foundation. 2010.