- Magnetic-particle inspection
-
Magnetic particle inspection (MPI) is a non-destructive testing (NDT) process for detecting surface and subsurface discontinuities in ferroelectric materials such as iron, nickel, cobalt, and some of their alloys. The process puts a magnetic field into the part. The piece can be magnetized by direct or indirect magnetization. Direct magnetization occurs when the electric current is passed through the test object and a magnetic field is formed in the material. Indirect magnetization occurs when no electric current is passed through the test object, but a magnetic field is applied from an outside source. The magnetic lines of force are perpendicular to the direction of the electric current which may be either alternating current (AC) or some form of direct current (DC) (rectified AC).
The presence of a surface or subsurface discontinuity in the material allows the magnetic flux to leak. Ferrous iron particles are applied to the part. The particles may be dry or in a wet suspension. If an area of flux leakage is present the particles will be attracted to this area. The particles will build up at the area of leakage and form what is known as an indication. The indication can then be evaluated to determine what it is, what may have caused it, and what action should be taken, if any.
Contents
Types of electrical currents used
There are several types of electrical currents used in MPI. For a proper current to be selected one needs to consider the part geometry, material, the type of discontinuity one is looking for, and how far the magnetic field needs to penetrate into the part.
- Alternating current (AC) is commonly used to detect surface discontinuities. Using AC to detect subsurface discontinuities is limited due to what is known as the skin effect, where the current runs along the surface of the part. Because the current alternates in polarity at 50 to 60 cycles per second it does not penetrate much past the surface of the test object. This means the magnetic domains will only be aligned equal to the distance AC current penetration into the part. The frequency of the alternating current determines how deep the penetration.
- Direct current (DC, full wave DC) is used to detect subsurface discontinuities where AC can not penetrate deep enough to magnetize the part at the depth needed. The amount of magnetic penetration depends on the amount of current through the part.[1] DC is also limited on very large cross-sectional parts how effective it will magnetize the part.
- Half wave DC (HWDC, pulsating DC) work similar to full wave DC, but allows for detection of surface breaking indications. HWDC is advantageous for inspection process because it actually helps move the magnetic particles over the test object so that they have the opportunity to come in contact with areas of magnetic flux leakage. The increase in particle mobility is caused by the pulsating current, which vibrates the test piece and particles.
Each method of magnetizing has its pros and cons. AC is generally always best for discontinuities open to the surface and some form of DC for subsurface.
Equipment
 A wet horizontal MPI machine with a 36 in (910 mm) coil
A wet horizontal MPI machine with a 36 in (910 mm) coil
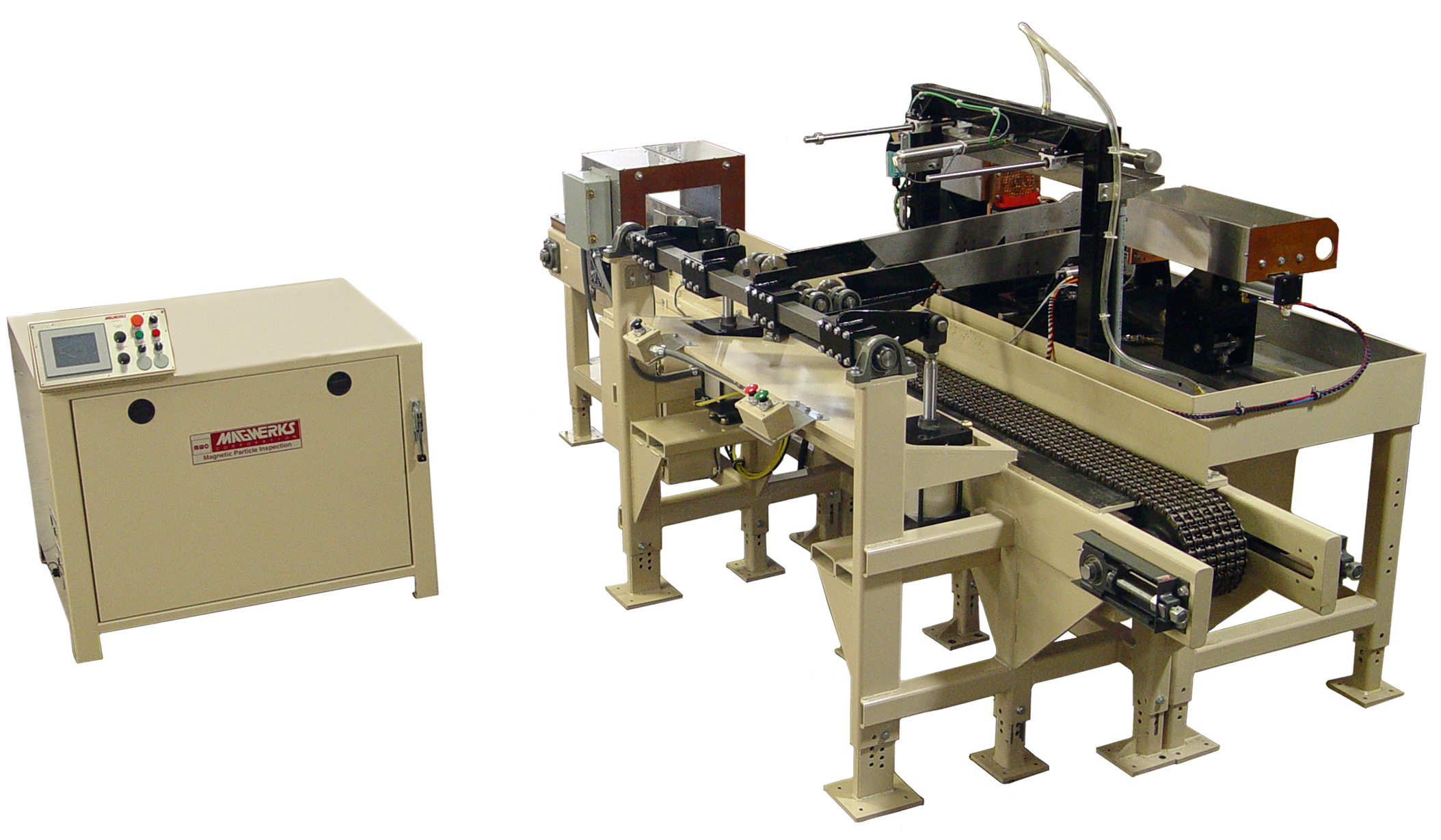
 An automatic wet horizontal MPI machine with an external power supply, conveyor, and demagnetizing system; its used to inspect engine cranks.
An automatic wet horizontal MPI machine with an external power supply, conveyor, and demagnetizing system; its used to inspect engine cranks.- A wet horizontal MPI machine is the most commonly used mass production inspection machine. The machine has a head and tail stock where the part is placed to magnetize it. In between the head and tail stock is typically an induction coil, which is used to change the orientation of the magnetic field by 90° from head stock. Most of the equipment is customized and built for a specific application.
- Mobile power packs are custom-built magnetizing power supplies used in wire wrapping applications.
- Magnetic yoke is a hand-held devices that induces a magnetic field between two poles. Common applications are for outdoor use, remote locations, and weld inspection. The draw back of magnetic yokes are they only induce a magnetic field between the poles so inspection is time consuming are on large parts. For proper inspection the yoke needs to be rotated 90 degrees for every inspection area to detect horizontal and vertical discontinuities. Yokes subsurface detection is limited. These systems used dry magnetic powders, wet powders, or aerosol cans.
Demagnetizing parts
 A pull through AC demagnetizing unit
A pull through AC demagnetizing unitAfter the part has been magnetized its needs to be demagnetized. This requires special equipment that works the opposite of magnetizing equipment. Magnetizing is normally done with high current pulse that very quickly reaches a peak current and instantaneously turns off leaving the part magnetized. To demagnetize a part the current or magnetic field needed, has to be equal or greater than the current or magnetic field used to magnetized the part, the current or magnetic field then is slowly reduced to zero leaving the part demagnetized.
- AC demagnetizing
- Pull through AC demagnetizing coils: seen in Fig 3 are AC powered devices that generate a high magnetic field where the part is slowly pulled through by hand or on a conveyor. The act of pulling the part through and away from coil's magnetic field slows drops the magnetic field in the part. Note many AC demagnetizing coils have power cycles of several seconds so the part must be passed through the coil and be several feet (meters) away before the demagnetizing cycle finishes or the part will have residue magnetism.
- AC step down demagnetizing: This is built in only a few MPI equipment, the process is where the part is subjected to equal or greater AC current, the current is reduced by X amps in several sequential pulses till zero current is reached. The number of steps required to demagnetizing a part is a function of amount current to magnetize the part.
- Reversing DC demagnetizing: The simply reverses the current flow of magnetizing pulse canceling the magnetic flow. Note: This is built in the MPI equipment by the manufacturer.
Magnetic particle powder
A common particle used to detect cracks is iron oxide, for both dry and wet systems.
- Wet system particle range in size from <0.5 to 10 micrometres for use with water or oil carriers. Particles used in wet systems have pigments applied that fluoresce at 365 nm ( Ultraviolet A) requiring 1000 µW/cm2 (10 W/m2) at the surface of the part for proper inspection. If the particles do not have the correct light applied in a Dark Room the particles can not be detected/seen. Its industry practices to use UV goggles/glasses to filter the UV light and amplify the visible light spectrum normally Green and Yellow created by the fluorescing particles. Green and Yellow fluorescence was chosen because the human eye reacts best to these colors.
- Dry particle powders range in size from 5 to 170 micrometres, designed to be seen in white light conditions. The particles are not designed to be used in wet environments. Dry powders are normally applied using hand operated air powder applicators
- Aerosol applied particles are similar to wet systems, sold in premixed aerosol cans similar to hair spray.
Magnetic particle carriers
It is common industry practices to use specifically designed oil and water-based carriers for magnetic particles. Deodorized kerosene, and mineral spirits have not been commonly used in the industry for 40 years. It is very dangerous to use kerosene or mineral spirits as a carrier to due to their low flash points, and inhalation of fumes by the operators.
Inspection
The following are general steps for inspecting on a wet horizontal machine:
- Part is cleaned of oil and other contaminants
- Necessary calculations done to know the amount of current required to magnetize the part. See ASTM E1444-05 for formulas.
- The magnetizing pulse is applied for 0.5 seconds during which the operator washes the part with the particle, stopping before the magnetic pulse is completed. Failure to Stop prior to end of the magnetic pulse will wash away indications.
- UV light is applied the operator looks for indications of defects that are 0 to +/- 45 degrees from path the current flowed through the part. Defects only appear that are 45 to 90 degrees the magnetic field. The easiest way to quickly figure out which way the magnetic field is running is grab the part with either hand between the head stocks laying your thumb against the part (do not wrap your thumb around the part) this is called either left or right thumb rule or right hand grip rule. The direction thumb points tell us the direction current is flowing, the Magnetic field will be running 90 degrees from the current path. On complex geometry like an engine crank the operator needs to visualize the changing direction of the current and magnetic field created. The current starts at 0 degrees then 45 degrees to 90 degree back to 45 degrees to 0 then -45 to -90 to -45 to 0 and repeats this for crankpin. So inspection can be time consuming to carefully look for indications that are only 45 to 90 degrees from the magnetic field.
- The part is either accepted or rejected based on pre-defined accept and reject criteria
- The part is demagnetized
- Depending on requirements the orientation of the magnetic field may need to be changed 90 degrees to inspect for defects that can not be detected from steps 3 to 5. The most common way is change magnetic field orientation is to a use Coil Shot. in Fig 1 a 36 inch Coil can be seen then steps 4, 5, and 6 are repeated
Standards
- ISO 3059, Non-destructive testing - Penetrant testing and magnetic particle testing - Viewing conditions
- ISO 9934-1, Non-destructive testing - Magnetic particle testing - Part 1: General principles
- ISO 9934-2, Non-destructive testing - Magnetic particle testing - Part 2: Detection media
- ISO 9934-3, Non-destructive testing - Magnetic particle testing - Part 3: Equipment
- ISO 17638, Non-destructive testing of welds - Magnetic particle testing
- ISO 23279, Non-destructive testing of welds - Magnetic particle testing of welds - Acceptance levels
- EN 1330-7, Non-destructive testing - Terminology - Part 7: Terms used in magnetic particle testing
- EN 1369, Founding - Magnetic particle inspection
- EN 10228-1, Non-destructive testing of steel forgings - Part 1: Magnetic particle inspection
- EN 10246-12, Non-destructive testing of steel tubes - Part 12: Magnetic particle inspection of seamless and welded ferromagnetic steel tubes for the detection of surface imperfections
- EN 10246-18, Non-destructive testing of steel tubes - Part 18: Magnetic particle inspection of the tube ends of seamless and welded ferromagnetic steel tubes for the detection of laminar imperfections
- American Society of Testing and Materials (ASTM)
- ASTM E1444-05
- ASTM A 275/A 275M Test Method for Magnetic Particle Examination of Steel Forgings
- ASTM A456 Specification for Magnetic Particle Inspection of Large Crankshaft Forgings
- ASTM E543 Practice Standard Specification for Evaluating Agencies that Performing Nondestructive Testing
- ASTM E 709 Guide for Magnetic Particle Testing Examination
- ASTM E 1316 Terminology for Nondestructive Examinations
- ASTM E 2297 Standard Guide for Use of UV-A and Visible Light Sources and Meters used in the Liquid Penetrant and Magnetic Particle Methods
- CSA W59
- AMS 2641 Magnetic Particle Inspection Vehicle
- AMS 3040 Magnetic Particles, Nonfluorescent, Dry Method
- AMS 3041 Magnetic Particles, Nonfluorescent,Wet Method, Oil Vehicle, Ready-To-Use
- AMS 3042 Magnetic Particles, Nonfluorescent, Wet Method, Dry Powder
- AMS 3043 Magnetic Particles, Nonfluorescent, Wet Method, Oil Vehicle, Aerosol Packaged
- AMS 044 Magnetic Particles, Fluorescent, Wet Method, Dry Powder
- AMS 3045 Magnetic Particles, Fluorescent, Wet Method, Oil Vehicle, Ready-To-Use
- AMS 3046 Magnetic Particles, Fluorescent, Wet Method, Oil Vehicle, Aerosol Packaged5
- AMS 5062 Steel, Low Carbon Bars, Forgings, Tubing, Sheet, Strip, and Plate 0.25 Carbon, Maximum
- AMS 5355 Investment Castings
- AMS I-83387 Inspection Process, Magnetic Rubber
- AMS-STD-2175 Castings, Classification and Inspection of AS 4792 Water Conditioning Agents for Aqueous Magnetic Particle Inspection AS 5282 Tool Steel Ring Standard for Magnetic Particle Inspection AS5371 Reference Standards Notched Shims for Magnetic Particle Inspection
- A-A-59230 Fluid, Magnetic Particle Inspection, Suspension
References
- ^ Betz, C. E. (1985), Principles of Magnetic Particle Testing, American Society for Nondestructive Testing, p. 234, ISBN 9780318214856, http://wiki.magwerks.com/wiki/images/c/c6/Waveform_to_Depth_Comparison.pdf.
Categories:- Nondestructive testing
- Casting (manufacturing)


Wikimedia Foundation. 2010.