- Inversive geometry
-
In geometry, inversive geometry is the study of those properties of figures that are preserved by a generalization of a type of transformation of the Euclidean plane, called inversion. These transformations preserve angles and map generalized circles into generalized circles, where a generalized circle means either a circle or a line (loosely speaking, a circle with infinite radius). Many difficult problems in geometry become much more tractable when an inversion is applied.
The concept of inversion can be generalized to higher dimensional spaces.
Contents
Circle inversion
Inverse of a point
-
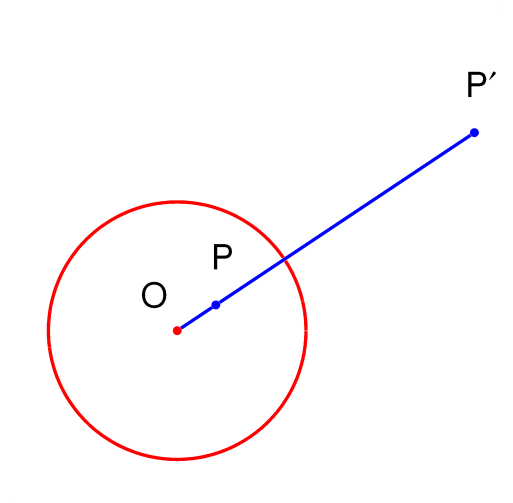
P' is the inverse of P with respect to the circle.
-

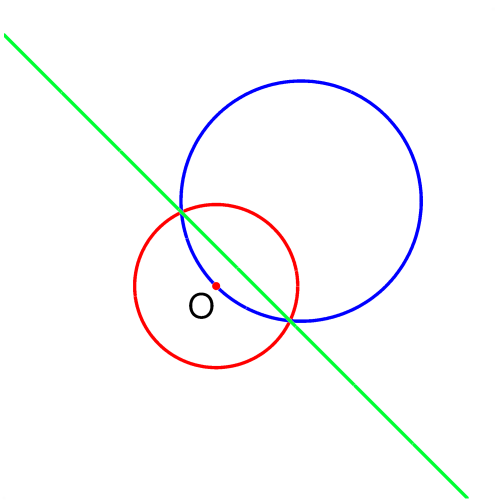
The inverse, with respect to the red circle, of a circle going through O (blue) is a line not going through O (green), and vice-versa.
-

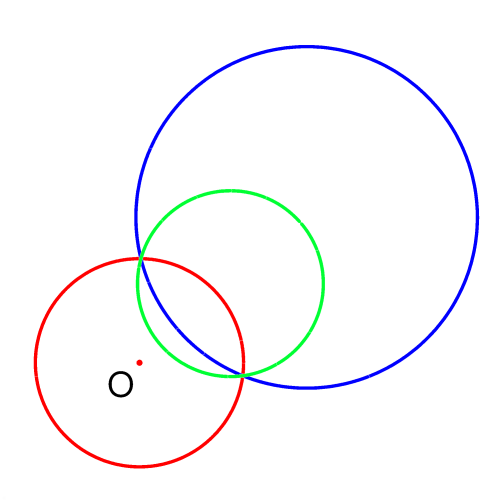
The inverse, with respect to the red circle, of a circle not going through O (blue) is a circle not going through O (green), and vice-versa.
-

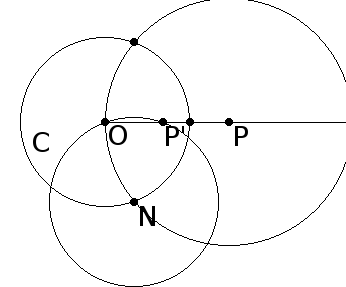
A procedure to construct the inverse P' of a point P outside a circle C. Let r be the radius of C. Since the triangles OPN and OP'N are similar, OP is to r as r is to OP'.
In the plane, the inverse of a point P with respect to a reference circle of center O and radius r is a point P', lying on the ray from O through P such that
The inversion taking any point P to its image P' also takes P' back to P, so the result of applying the same inversion twice is the identity transformation, making inversion an example of involution.
It follows from the definition that the inversion of any point inside the reference circle must lie outside it, and vice-versa, with the center and the point at infinity changing positions, whilst any point on the circle is unaffected. In summary, the nearer a point to the center, the further away its transformation, and vice versa.
Properties
The inversion of a set of points in the plane is the set of the inverse of each separate element with respect to the circle. The following properties are what make circle inversion important.
- A circle which passes through the center of the reference circle inverts to a line not passing through the center, and vice versa; whereas a line passing through the center of the reference circle is inverted into itself.
- A circle not passing through the center of the reference circle inverts to a circle meeting it at the same points whilst not passing through the center. A circle (or line) is unchanged by inversion if and only if it is orthogonal to the reference circle at the points of intersection.
Application
Note that the center of a circle being inverted and the center of the circle as result of inversion are collinear with the center of the reference circle. This fact could be useful in proving the Euler line of the intouch triangle of a triangle coincides with its OI line. The proof roughly goes as below:
Invert with respect to the incircle of triangle ABC. The medial triangle of the intouch triangle is inverted into triangle ABC, meaning the circumcenter of the medial triangle, that is, the nine-point center of the intouch triangle, the incenter and circumcenter of triangle ABC are collinear.
Any two non-intersecting circles may be inverted into concentric circles. Then the inversive distance (usually denoted δ) is defined as the natural logarithm of the ratio of the radii of the two concentric circles.
In addition, any two non-intersecting circles may be inverted into congruent circles, using circle of inversion centered at a point on the circle of antisimilitude.
The Peaucellier linkage is a mechanical implementation of inversion in a circle. It provides an exact solution to the important problem of converting between linear and circular motion.
Inversions in three dimensions
Circle inversion is generalizable to sphere inversion in three dimensions. The inversion of a point P in 3D with respect to a reference sphere centered at a point O with radius R is a point P' such that
 and the points P and P' are on the same ray going from O. As with the 2D version, a sphere inverts to a sphere, except that if a sphere passes through the center O of the reference sphere, then it inverts to a plane. Any plane not passing through O, inverts to a sphere touching at O.
and the points P and P' are on the same ray going from O. As with the 2D version, a sphere inverts to a sphere, except that if a sphere passes through the center O of the reference sphere, then it inverts to a plane. Any plane not passing through O, inverts to a sphere touching at O.Stereographic projection is a special case of sphere inversion. Consider a sphere B of radius 1 and a plane P touching B at the South Pole S of B. Then P is the stereographic projection of B with respect to the North Pole N of B. Consider a sphere B2 of radius 2 centered at N. The inversion with respect to B2 transforms B into its stereographic projection P.
Axiomatics and generalization
The axiomatic foundation and generalization of inversive plane geometry is the Möbius plane.
Relation to Erlangen program
According to Coxeter,[1] the transformation by inversion in circle was invented by L. I. Magnus in 1831. Since then this mapping has become an avenue to higher mathematics. Through some steps of application of the circle inversion map, a student of transformation geometry soon appreciates the significance of Felix Klein’s Erlangen program, an outgrowth of certain models of hyperbolic geometry
Dilations
The combination of two inversions in concentric circles results in a similarity, homothetic transformation, or dilation characterized by the ratio of the circle radii.
Reciprocation
When a point in the plane is interpreted as a complex number
 , with complex conjugate
, with complex conjugate  , then the reciprocal of z is
, then the reciprocal of z is  . Consequently the algebraic form of the inversion in a unit circle is
. Consequently the algebraic form of the inversion in a unit circle is .
.
Reciprocation is key in transformation theory as a generator of the Mobius group. The other generators are translation and rotation, both familiar through physical manipulations in the ambient 3-space. Introduction of reciprocation (dependent upon circle inversion) is what produces the peculiar nature of Mobius geometry, which is sometimes identified with inversive geometry (of the Euclidean plane). However, inversive geometry is the larger study since it includes the raw inversion in a circle (not yet made, with conjugation, into reciprocation). Inversive geometry also includes the conjugation mapping. Neither conjugation nor inversion-in-a-circle are in the Mobius group since they are non-conformal (see below). Mobius group elements are analytic functions of the whole plane and so are necessarily conformal.
Higher geometry
As mentioned above, zero, the origin, requires special consideration in the circle inversion mapping. The approach is to adjoin a point at infinity designated ∞ or 1/0 . In the complex number approach, where reciprocation is the apparent operation, this procedure leads to the complex projective line, often called the Riemann sphere. It was subspaces and subgroups of this space and group of mappings that were applied to produce early models of hyperbolic geometry by Arthur Cayley, Felix Klein, and Henri Poincaré. Thus inversive geometry includes the ideas originated by Lobachevsky and Bolyai in their plane geometry. Furthermore, Felix Klein was so overcome by this facility of mappings to identify geometrical phenomena that he delivered a manifesto, the Erlangen program, in 1872. Since then many mathematicians reserve the term geometry for the group of mappings of some space characterized by a group invariant, a measure, like distance or angle.
For example, Smogorzhevsky[2] develops several theorems of inversive geometry before beginning Lobachevskian geometry. First he defines two points as symmetric when they are images of each other under inversion in a circle. Then he writes of mutually orthogonal circles when the tangents to the circles, or their radii, at a point of intersection are perpendicular to each other.
- If a circle q passes through two distinct points A and A', symmetrical with respect to a circle k, then the circles k and q are mutually orthogonal.
- If the circles k and q are mutually orthogonal, then a straight line passing through the center O of k and intersecting q, does so at points symmetrical with respect to k.
- Given a triangle OAB in which O is the center of a circle k, and points A' and B' are symmetrical to A and B with respect to k, then
- A straight line not passing through the pole of inversion is transformed by inversion into a circle passing through the inversion pole.
- Inversion transforms a circle passing through the pole of inversion into a straight line not passing through the pole of inversion.
- Inversion transforms a circle not passing through the pole of inversion into a circle that likewise does not pass through the inversion pole.
- The points of intersection of two circles p and q orthogonal to a circle k, are symmetrical with respect to k.
- If M and M' are two points, symmetrical with respect to a circle k on two curves m and m', also symmetrical with respect to k, then the tangents to m and m' at the points M and M' are either perpendicular to the straight line MM' or form with this line an isosceles triangle with base MM'.
- Inversion leaves angles unaltered.
Inversion in higher dimensions
In the spirit of generalization to higher dimensions, inversive geometry is the study of transformations generated by the Euclidean transformations together with inversion in an n-sphere:
where r is the radius of the inversion.
In 2 dimensions, with r = 1, this is circle inversion with respect to the unit circle.
As said, in inversive geometry there is no distinction made between a straight line and a circle (or hyperplane and hypersphere): a line is simply a circle in its particular embedding in a Euclidean geometry (with a point added at infinity) and one can always be transformed into another.
A remarkable fact about higher-dimensional conformal maps is that they arise strictly from inversions in n-spheres or hyperplanes and Euclidean motions: see Liouville's theorem (conformal mappings).
Anticonformal mapping property
The circle inversion map is anticonformal, which means that at every point it preserves angles and reverses orientation (a map is called conformal if it preserves oriented angles) . Algebraically, a map is anticonformal if at every point the Jacobian is a scalar times an orthogonal matrix with negative determinant: in two dimensions the Jacobian must be a scalar times a reflection at every point. This means that if J is the Jacobian, then
 and
and  Computing the Jacobian in the case zi = xi/||x||2, where ||x||2 = x12 + ... + xn2 gives JJT = kI, with k = 1/||x||4, and additionally det(J) is negative; hence the inversive map is anticonformal.
Computing the Jacobian in the case zi = xi/||x||2, where ||x||2 = x12 + ... + xn2 gives JJT = kI, with k = 1/||x||4, and additionally det(J) is negative; hence the inversive map is anticonformal.In the complex plane, the most obvious circle inversion map (i.e., using the unit circle centered at the origin) is the complex conjugate of the complex inverse map taking z to 1/z. The complex analytic inverse map is conformal and its conjugate, circle inversion, is anticonformal.
Inversive geometry and hyperbolic geometry
The (n − 1)-sphere with equation
will have a positive radius so long as a12 + ... + an2 is greater than c, and on inversion gives the sphere
Hence, it will be invariant under inversion if and only if c = 1. But this is the condition of being orthogonal to the unit sphere. Hence we are led to consider the (n − 1)-spheres with equation
which are invariant under inversion, orthogonal to the unit sphere, and have centers outside of the sphere. These together with the subspace hyperplanes separating hemispheres are the hypersurfaces of the Poincaré disc model of hyperbolic geometry.
Since inversion in the unit sphere leaves the spheres orthogonal to it invariant, the inversion maps the points inside the unit sphere to the outside and vice-versa. This is therefore true in general of orthogonal spheres, and in particular inversion in one of the spheres orthogonal to the unit sphere maps the unit sphere to itself. It also maps the interior of the unit sphere to itself, with points outside the orthogonal sphere mapping inside, and vice-versa; this defines the reflections of the Poincaré disc model if we also include with them the reflections through the diameters separating hemispheres of the unit sphere. These reflections generate the group of isometries of the model, which tells us that the isometries are conformal. Hence, the angle between two curves in the model is the same as the angle between two curves in the hyperbolic space.
See also
- Inverse curve
- Circle of antisimilitude
- Duality (projective geometry)
- Möbius transformation
- Projective geometry
Notes
- ^ H.S.M. Coxeter (1961) Introduction to Geometry, Chapter 6: Circles and Spheres (pp.77–95), John Wiley & Sons.
- ^ A.S. Smogorzhevsky (1982) Lobachevskian Geometry, Mir Publishers, Moscow
References
- David E. Blair (2000). Inversion Theory and Conformal Mapping. American Mathematical Society. ISBN 0-8218-2636-0.
- Brannan, David A.; Esplen, Matthew F.; Gray, Jeremy J. (1998), Geometry (Chapter 5), Cambridge: Cambridge University Press, pp. 199–260, ISBN 0-521-59787-0
- Robin Hartshorne (2000). "Chapter 27: Circular Inversion". Geometry: Euclid and Beyond. Springer. ISBN 0-387-98650-2.
External links
- Inversion: Reflection in a Circle at cut-the-knot
- Wilson Stother's inversive geometry page
- IMO Compendium Training Materials practice problems on how to use inversion for math olympiad problems
- Weisstein, Eric W., "Inversion" from MathWorld.
- Visual Dictionary of Special Plane Curves Xah Lee
Categories:- Inversive geometry
- Functions and mappings
-







Wikimedia Foundation. 2010.