- Metacentric height
-
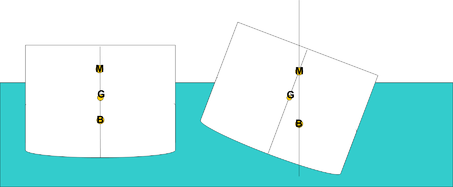 Ship Stability diagram showing centre of gravity (G), centre of buoyancy (B), and metacentre (M) with ship upright and heeled over to one side. Note that for small angles, G and M are fixed, while B moves as the ship heels, and for big angles - B and M are moving.
Ship Stability diagram showing centre of gravity (G), centre of buoyancy (B), and metacentre (M) with ship upright and heeled over to one side. Note that for small angles, G and M are fixed, while B moves as the ship heels, and for big angles - B and M are moving.
The metacentric height is a measurement of the static stability of a floating body. It is calculated as the distance between the centre of gravity of a ship and its metacentre (GM). A larger metacentric height implies greater stability against overturning. Metacentric height also has implication on the natural period of rolling of a hull, with very large metacentric heights being associated with shorter periods of roll which are uncomfortable for passengers. Hence, a sufficiently high but not excessively high metacentric height is considered ideal for passenger ships.
Contents
Metacentre
How quickly or slowly a boat rolls is like a pendulum or metronome, having a natural frequency. That frequency is determined (like with a metronome) by the amount of mass on some length of swing arm being pulled by gravity. Greater mass and/or arm length means a slower swing; and less mass and/or shorter arm length means a faster swing.
In a boat, the swing arm is a distance called "GM or metacentric height", being the distance between two points: "G" the center of gravity of the boat and "M" which is an imaginary point called the metacenter.
Metacenter is determined by a ratio of the inertia resistance of the boat divided by the volume of the boat. (The inertia resistance is a quantified description of how the waterline width of the boat resists overturning.) Wide and shallow or narrow and deep hulls have high transverse metacenters (relative to the keel), and the opposite have low metacenters; the extreme opposite is shaped like a log or round bottomed boat.
Ignoring the ballast, wide and shallow or narrow and deep means the ship is very quick to roll and very hard to overturn and is stiff. And log shaped round bottomed means slow rolls and easy to overturn and tender.
The bottom point of the swinging pendulum arm, "G", is the center of gravity. "GM", the swinging pendulum length of a boat, can be lengthened by lowering the center of gravity or changing the hull form (and thus changing the volume displaced and second moment of area of the waterplane.
An ideal boat strikes a balance. Very tender boats with very slow roll periods are at risk of overturning and have uncomfortable feel for passengers. However, vessels with a higher metacentric height are "excessively stable" with a short roll period resulting in high accelerations at the deck level.
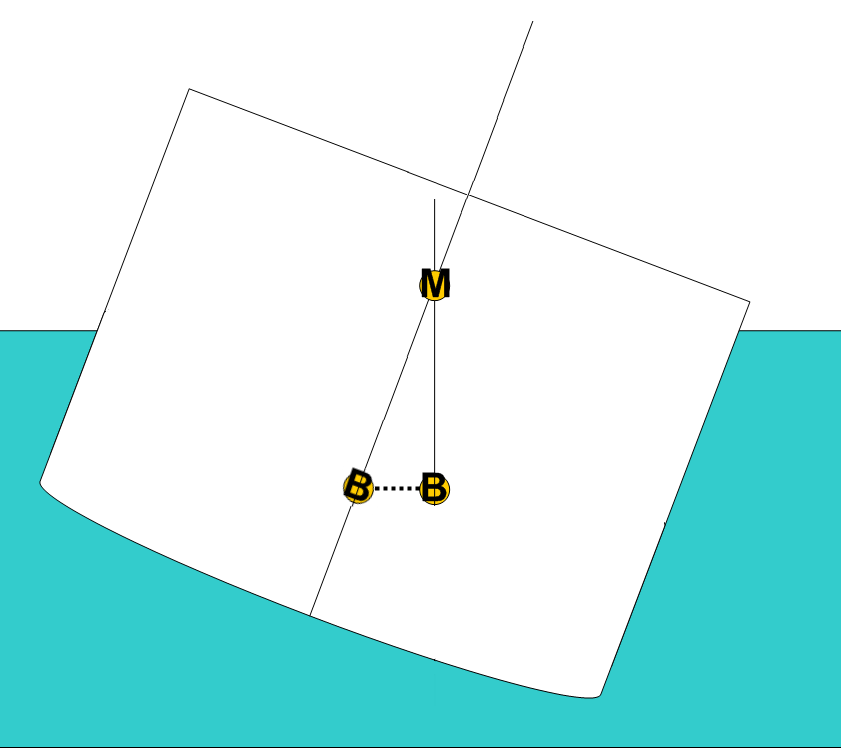
When a ship is heeled, the centre of buoyancy of the ship moves laterally. The point at which a vertical line through the heeled centre of buoyancy crosses the line through the original, vertical centre of buoyancy is the metacentre. The metacentre remains directly above the centre of buoyancy regardless of the tilt of a floating body, such as a ship. In the diagram to the right the two Bs show the centres of buoyancy of a ship in the upright and heeled condition, and M is the metacentre. The metacentre is considered to be fixed for small angles of heel; however, at larger angles of heel the metacentre can no longer be considered fixed, and other means must be found to calculate the ship's stability.
The metacentre can be calculated using the formulae:- KM = KB + BM

Where KB is the centre of buoyancy (height above the keel), I is the Second moment of area of the waterplane in metres4 and V is the volume of displacement in metres3. KM is the distance from the keel to the metacentre. [1]
Different centres
 Initially the second moment of area increases as the surface area increases, increasing BM, so Mφ moves to the opposite side, thus increasing the stability arm. When the deck is flooded, the stability arm rapidly decreases.
Initially the second moment of area increases as the surface area increases, increasing BM, so Mφ moves to the opposite side, thus increasing the stability arm. When the deck is flooded, the stability arm rapidly decreases.The centre of buoyancy, is the centre of the volume of water which the hull displaces. This point is referred to as B in naval architecture. The centre of gravity of the ship is commonly denoted as point G or VCG. When a ship is stable, the centre of buoyancy is vertically in line with the centre of gravity of the ship.[2]
The metacentre is the point where the lines intersect (at angle φ) of the upward force of buoyancy of φ ± dφ. When the ship is vertical the metacentre lies above the centre of gravity and so moves in the opposite direction of heel as the ship rolls. The metacentre is commonly designated as point MT in naval architecture.
The distance between the centre of gravity and the metacentre is called the metacentric height. This distance is also abbreviated as GM. As the ship heels over, the centre of gravity generally remains fixed with respect to the ship because it just depends upon position of the ship's weight and cargo, but the surface area increases, increasing BMφ. The metacentre, Mφ, moves up and sideways in the opposite direction in which the ship has rolled and is no longer directly over the centre of gravity.[3]
The righting force on the ship is then caused by gravity pulling down on the hull (effectively acting on its centre of gravity) and the buoyancy pushing the hull upwards (effectively acting along the vertical line passing through the centre of buoyancy and the metacentre above it). This creates a righting moment (a kind of torque) which rotates the hull upright again and is proportional to the horizontal distance between the centre of gravity and the metacentre. The metacentric height is important because the righting force is proportional to the metacentric height times the sine of the angle of heel.
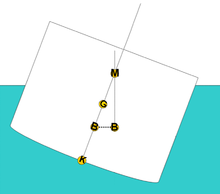
When setting a common reference for the centres, the molded (within the plate or planking) line of the keel (K) is generally chosen; thus, the reference heights are:
KB - Centre of Buoyancy
KG - Centre of Gravity
KMT - Transverse MetacentreRighting arm
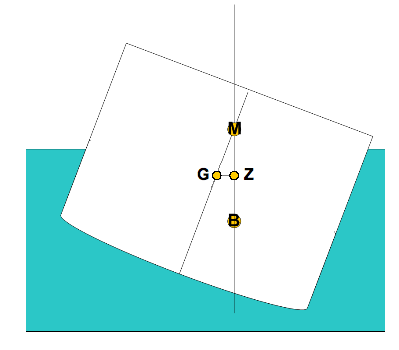
 Distance GZ is the righting arm: a notional lever through which the force of buoyancy acts.
Distance GZ is the righting arm: a notional lever through which the force of buoyancy acts.Sailing vessels are designed to operate with a higher degree of heel than motorized vessels and the righting moment at extreme angles is of high importance. This is expressed as the righting arm (known also as GZ — see diagram): the horizontal distance between the centre of buoyancy and the centre of gravity.[3]
GZ = GM sin φ [2]
Monohulled sailing vessels should be designed to have a positive righting arm (the limit of positive stability) to at least 120º of heel,[4] although some racing sailboats have stability limits down to 90º (masts flat to the surface). As the displacement of the hull at any particular degree of list is not proportional, calculations can be difficult, and the concept was not introduced formally into naval architecture until about 1970.[5]
Stability
GM and rolling period
Metacentre has a direct relationship with a ship's rolling period. A ship with a small GM will be "tender" - have a long roll period. An excessively low or negative GM increases the risk of a ship capsizing in rough weather, for example HMS Captain or the Vasa. It also puts the vessel at risk of potential for large angles of heel if the cargo or ballast shifts, such as with the Cougar Ace. A ship with low GM is less safe if damaged and partially flooded because the lower metacentric height leaves less safety margin. For this reason, maritime regulatory agencies such as the International Maritime Organization specify minimum safety margins for sea-going vessels. A larger metacentric height on the other hand can cause a vessel to be too "stiff"; excessive stability is uncomfortable for passengers and crew. This is because the stiff vessel quickly responds to the sea as it attempts to assume the slope of the wave. An overly stiff vessel rolls with a short period and high amplitude which results in high angular acceleration. This increases the risk of damage to the ship and to cargo. In contrast a "tender" ship lags behind the motion of the waves and tends to roll at lesser amplitudes. A passenger ship will typically have a long rolling period for comfort, perhaps 12 seconds while a tanker or freighter might have a rolling period of 6 to 8 seconds.
The period of roll can be estimated from the following equation[2]
Where g is the gravitational constant, k is the radius of gyration about the longitudinal axis through the centre of gravity and
 is the stability index.
is the stability index.Damaged Stability
If a ship floods, the loss of stability is caused by the increase in B, the centre of buoyancy, and the loss of waterplane area - thus a loss of the waterplane moment of inertia - which decreases the metacentric height.[2] This additional mass will also reduce freeboard (distance from water to the deck) and the ship's angle of down flooding (minimum angle of heel at which water will be able to flow into the hull). The range of positive stability will be reduced to the angle of down flooding resulting in a reduced righting lever. When the vessel is inclined, the fluid in the flooded volume will move to the lower side, shifting its centre of gravity toward the list, further extending the heeling force. This is known as the free surface effect.
Free surface effect
Further information: Free surface effectIn tanks or spaces that are partially filled with a fluid or semi-fluid (fish, ice or grain for example) as the tank is inclined the surface of the liquid, or semi-fluid, stays level. This results in a displacement of the centre of gravity of the tank or space relative to the overall centre of gravity. The effect is similar to that of carrying a large flat tray of water. When an edge is tipped, the water rushes to that side, which exacerbates the tip even further.
The significance of this effect is proportional to the square of the width of the tank or compartment, so two baffles separating the area into thirds will reduce the displacement of the centre of gravity of the fluid by a factor of 9. This is of significance in ship fuel tanks or ballast tanks, tanker cargo tanks, and in flooded or partially flooded compartments of damaged ships. Another worrying feature of free surface effect is that a positive feedback loop can be established, in which the period of the roll is equal or almost equal to the period of the motion of the centre of gravity in the fluid, resulting in each roll increasing in magnitude until the loop is broken or the ship capsizes.
This has been significant in historic capsizes, most notably the MS Herald of Free Enterprise.
Transverse and longitudinal metacentric heights
There is also a similar consideration in the movement of the metacentre forward and aft as a ship pitches. Metacentres are usually separately calculated for transverse (side to side) rolling motion and for lengthwise longitudinal pitching motion. These are variously known as
 and
and  , GM(t) and GM(l), or sometimes GMt and GMl .
, GM(t) and GM(l), or sometimes GMt and GMl .Technically, there are different metacentric heights for any combination of pitch and roll motion, depending on the moment of inertia of the waterplane area of the ship around the axis of rotation under consideration, but they are normally only calculated and stated as specific values for the limiting pure pitch and roll motion.
Measurement
The metacentric height is normally estimated during the design of a ship but can be determined by an inclining test once it has been built. This can also be done when a ship or offshore floating platform is in service. It can be calculated by theoretical formulas based on the shape of the structure.
The angle(s) obtained during the inclining experiment are directly related to GM. Prior to the inclining experiment, an accounting of the 'as-built' centre of gravity is done; knowing KM and KG, the metacentric height (GM) can be calculated.
See also
References
- ^ Ship Stability. Kemp & Young. ISBN 0853090424
- ^ a b c d Comstock, John (1967). Principles of Naval Architecture. New York: Society of Naval Architects and Marine Engineers. pp. 827. ISBN 670020738.
- ^ a b Harland, John (1984). Seamanship in the age of sail. London: Conway Maritime Press. pp. 43. ISBN 0851771793.
- ^ Rousmaniere, Edited by John; Technical Committee of the Cruising Club of America (1987). Desirable and Undesirable Characteristics of Offshore Yachts. New York, London: W.W.Norton. pp. 310. ISBN 0-393-03311-2.
- ^ U.S. Coast Guard Technical computer program support accessed 20 December 2006.
Ship measurements Length Breadth Depth Volume WorldwideSpecializedArchaicCapacity CurrentArchaicWeight Stability Limits Aframax · Capesize · Chinamax · Handymax/Supramax · Handysize · Malaccamax · Panamax and New Panamax · Q-Max (Qatar-max) · Seawaymax · Suezmax · VLCC and ULCCCategories:- Ship measurements
- Nautical terms
- Geometric centers



Wikimedia Foundation. 2010.