- Dual quaternion
-
The set of dual quaternions is an algebra that can be used to represent spatial rigid body displacements.[1] A dual quaternion is an ordered pair of quaternions  = (A, B) and therefore is constructed from eight real parameters. Because rigid body displacements are defined by six parameters, dual quaternion parameters include two algebraic constraints.
W. R. Hamilton introduced quaternions[2][3] in 1843 and by 1873 W. K. Clifford obtained a broad generalization of these numbers that he called biquaternions,[4][5] which is an example of what is now called a Clifford algebra.[6] At the turn of the 20th century, Aleksandr Kotelnikov[7] and E. Study[8] developed dual vectors and dual quaternions for use in the study of mechanics.
In ring theory, dual quaternions are a ring (mathematics) constructed in the same way as the quaternions, except using dual numbers instead of real numbers as coefficients. A dual quaternion can be represented in the form q = q0 + ε qε, where q0 and qε are ordinary quaternions and ε is the dual unit (εε = 0). Unlike quaternions they do not form a division ring.
Similar to the way that rotations in 3D space can be represented by quaternions of unit length, rigid motions in 3D space can be represented by dual quaternions of unit length. This fact is used in theoretical kinematics (see McCarthy), and in applications to 3D computer graphics, robotics and computer vision.[9]
In 1891 Eduard Study realized that this associative algebra was ideal for describing the group of motions of three-dimensional space. He further developed the idea in Geometrie der Dynamen in 1901. B. L. van der Waerden called the structure "Study biquaternions", one of three eight-dimensional algebras referred to as biquaternions.
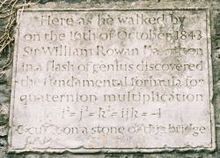 Plaque on Broom bridge (Dublin) commemorating Hamilton's invention of quaternions.
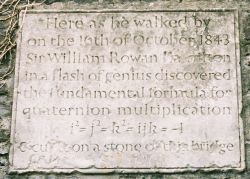
Plaque on Broom bridge (Dublin) commemorating Hamilton's invention of quaternions.
Contents
Formulas
In order to describe operations with dual quaternions, it is helpful to first consider quaternions.[10]
A quaternion is a linear combinations of the basis elements 1, i, j, and k. Hamilton's product rule for i, j, and k is often written as
Compute i(ijk)=-jk=-i, to obtain jk=i, and (ijk)k=-ij=-k or ij=k. Now because j(jk)=ji=-k, we see that this product yields ij=-ji, which links quaternions to the properties of determinants.
A convenient way to work with the quaternion product is to write a quaternion as the sum of a scalar and a vector, that is A = a0 + A, where a0 is a real number and A = A1i + A2j + A3k is a three dimensional vector. The vector dot and cross operations can now be used to define the quaternion product of A=a0+A and C=c0+C as
A dual quaternion is usually described as a quaternion with dual numbers as coefficients. A dual number is an ordered pair â=(a, b). Two dual numbers add componentwise and multiply by the rule âĉ=(a, b)(c, d) = (ac, ad + bc). Dual numbers are often written in the form â=a+εb, where ε is the dual unit that commutes with i, j, k and has the property ε2=0.
The result is that a dual quaternion is the ordered pair of quaternions Â=(A, B). Two dual quaternions add componentwise and multiply by the rule,
It is convenient to write a dual quaternion as the sum of a dual scalar and a dual vector, Â = â0 + A, where â0=(a, b) and A=(A, B) is the dual vector that defines a screw. This notation allows us to write the product of two dual quaternions as
Addition
The addition of dual quaternions is defined componentwise so that given,
and
then
Multiplication
Multiplication of two dual quaternion follows from the multiplication rules for the quaternion units i, j, k and commutative multiplication by the dual unit ε. In particular, given
and
then
Notice that there is no BD term, because the definition of dual numbers requires that ε2 = 0.
This gives us the multiplication table (note the multiplication order is row times column):Multiplication table for dual quaternion units × 1 i j k ε εi εj εk 1 1 i j k ε εi εj εk i i −1 k −j εi −ε εk −εj j j −k −1 i εj −εk −ε εi k k j −i −1 εk εj −εi −ε ε ε εi εj εk 0 0 0 0 εi εi −ε εk −εj 0 0 0 0 εj εj −εk −ε εi 0 0 0 0 εk εk εj −εi −ε 0 0 0 0 Conjugate
The conjugate of a dual quaternion is the extension of the conjugate of a quaternion, that is
As for quaternions, the conjugate of the product of dual quaternions, Ĝ = ÂĈ, is the product of their conjugates in reverse order,
It is useful to introduce the functions Sc(∗) and Vec(∗) that select the scalar and vector parts of a quaternion, or the dual scalar and dual vector parts of a dual quaternion. In particular, if  = â0 + A, then
This allows the definition of the conjugate of  as
or,
The product of a dual quaternion with its conjugate yields
This is a dual scalar which is the magnitude squared of the dual quaternion.
Norm
The norm of a dual quaternion |Â| is computed using the conjugate to compute |Â| = √(ÂÂ*). This is a dual number called the magnitude of the dual quaternion. Dual quaternions with |Â| = 1 are unit dual quaternions.
Dual quaternions of magnitude 1 are used to represent spatial Euclidean displacements. Notice that the requirement that ÂÂ* = 1, introduces two algebraic constraints on the components of Â, that is
Inverse
The inverse of a dual quaternion is defined as
This is the dual version of the inverse of a quaternion.
Dual quaternions and spatial displacements
A benefit of the dual quaternion formulation of the composition of two spatial displacements DB=([RB], b) and DA=([RA],a) is that the resulting dual quaternion yields directly the screw axis and dual angle of the composite displacement DC=DBDA.
In general, the dual quaternion associated with a spatial displacement D = ([A],d) is constructed from its screw axis S={S, V) and the dual angle (φ, d) where φ is the rotation about and d the slide along this axis, which defines the displacement D. The associated dual quaternion is given by,
Let the composition of the displacement DB with DA be the displacement DC=DBDA. The screw axis and dual angle of DC is obtained from the product of the dual quaternions of DA and DB, given by
That is, the composite displacement DC=DBDA has the associated dual quaternion given by
Expand this product in order to obtain
Divide both sides of this equation by the identity
to obtain
This is Rodrigues formula for the screw axis of a composite displacement defined in terms of the screw axes of the two displacements. He derived this formula in 1840.[11]
The three screw axes A, B, and C form a spatial triangle and the dual angles at these vertices between the common normals that form the sides of this triangle are directly related to the dual angles of the three spatial displacements.
Matrix form of dual quaternion multiplication
The matrix representation of the quaternion product is convenient for programming quaternion computations using matrix algebra, which is true for dual quaternion operations as well.
The quaternion product AC is a linear transformation by the operator A of the components of the quaternion C, therefore there is a matrix representation of A operating on the vector formed from the components of C.
Assemble the components of the quaternion C=c0+C into the array C=(C1, C2, C3, c0). Notice that the components of the vector part of the quaternion are listed first and the scalar is listed last. This is an arbitrary choice, but once this convention is selected we must abide by it.
The quaternion product AC can now be represented as the matrix product
The product AC can also be viewed as an operation by C on the components of A, in which case we have
The dual quaternion product ÂĈ = (A, B)(C, D) = (AC, AD+BC) can be formulated as a matrix operation as follows. Assemble the components of Ĉ into the eight dimensional array Ĉ = (C1, C2, C3, c0, D1, D2, D3, d0), then ÂĈ is given by the 8x8 matrix productAs we saw for quaternions, the product ÂĈ can be viewed as the operation of Ĉ on the coordinate vector Â, which means ÂĈ can also be formulated as,
More on spatial displacements
The dual quaternion of a displacement D=([A], d) can be constructed from the quaternion S=cos(φ/2) + sin(φ/2)S that defines the rotation [A] and the vector quaternion constructed from the translation vector d, given by D = d1i + d2j + d3k. Using this notation, the dual quaternion for the displacement D=([A], d) is given by
Let the Plucker coordinates of a line in the direction x through a point p in a moving body and its coordinates in the fixed frame which is in the direction X through the point P be given by,
Then the dual quaternion of the displacement of this body transforms Plucker coordinates in the moving frame to Plucker coordinates in the fixed frame by the formula
Using the matrix form of the dual quaternion product this becomes,
This calculation is easily managed using matrix operations.
Dual quaternions and 4x4 homogeneous transforms
It might be helpful, especially in rigid body motion, to represent dual quaternions as homogeneous matrices. As given above a dual quaternion can be written as:
 where r and d are both quaternions. The r quaternion is known as the real or rotational part and the d quaternion is known as the dual or displacement part. A 3 dimensional position vector,
where r and d are both quaternions. The r quaternion is known as the real or rotational part and the d quaternion is known as the dual or displacement part. A 3 dimensional position vector,can be transformed by constructing the dual-quaternion representation,
then a transformation by
 is given by
is given by .
.
The rotation part can be given by
where θ is the angle of rotation about axis
 . The rotation part can be expressed as a 3×3 orthogonal matrix by
. The rotation part can be expressed as a 3×3 orthogonal matrix byThe displacement can be written as
 .
.
Translation and rotation combined in one transformation matrix is:
Where the left upper 3×3 matrix is the rotation matrix we just calculated.
Eponyms
Since both Eduard Study and William Kingdon Clifford used, and wrote upon, the dual quaternions, at times authors refer to dual biquaternions as “Study biquaternions” or “Clifford biquaternions”. The latter eponym has also been used to refer to split-biquaternions. Read the article by Joe Rooney linked below for view of a supporter of W.K. Clifford’s claim. Since the claims of Clifford and Study are in contention, it is convenient to use the current designation dual quaternion to avoid conflict.
See also
- Screw theory
- Screw axis
- Quaternion
- Rational motion
- Quaternions and spatial rotation
- Biquaternion
- Conversion between quaternions and Euler angles
- Clifford algebra
- Olinde Rodrigues
References
- ^ A.T. Yang, Application of Quaternion Algebra and Dual Numbers to the Analysis of Spatial Mechanisms, Ph.D thesis, Columbia University, 1963.
- ^ W. R. Hamilton, "On quaternions, or on a new system of imaginaries in algebra," Philos. Mag. 18, installments July 1844 - April 1850, ed. by D. E. Wilkins (2000)
- ^ W. R. Hamilton, Elements of Quaternions, Longmans, Green & Co., London, 1866
- ^ W. K. Clifford, "Preliminary sketch of bi-quaternions, Proc. London Math. Soc. Vol. 4 (1873) pp. 381-395
- ^ W. K. Clifford, Mathematical Papers, (ed. R. Tucker), London: Macmillan, 1882.
- ^ J. M. McCarthy, An Introduction to Theoretical Kinematics, pp. 62–5, MIT Press 1990.
- ^ A. P. Kotelnikov, Screw calculus and some applications to geometry and mechanics, Annal. Imp. Univ. Kazan (1895)
- ^ E. Study, Geometrie der Dynamen, Teubner, Leipzig, 1901.
- ^ A. Torsello, E. Rodolà and A. Albarelli, Multiview Registration via Graph Diffusion of Dual Quaternions, Proc. of the XXIV IEEE Conference on Computer Vision and Pattern Recognition, pp. 2441-2448, June 2011.
- ^ O. Bottema and B. Roth, Theoretical Kinematics, North Holland Publ. Co., 1979
- ^ Rodrigues, O. (1840), Des lois géométriques qui régissent les déplacements d’un système solide dans l’espace, et la variation des coordonnées provenant de ses déplacements con- sidérés indépendamment des causes qui peuvent les produire, Journal de Mathématiques Pures et Appliquées de Liouville 5, 380–440.
- A.T. Yang (1963) Application of quaternion algebra and dual numbers to the analysis of spatial mechanisms, Ph.D thesis, Columbia University.
- A.T. Yang (1974) "Calculus of Screws" in Basic Questions of Design Theory, William R. Spillers, editor, Elsevier, pages 266 to 281.
- J.M. McCarthy (1990) An Introduction to Theoretical Kinematics, pp. 62–5, MIT Press [ISBN 0-262-13252-4].
- Dual Quaternions for Rigid Transformation Blending
- Joe Rooney William Kingdon Clifford, Department of Design and Innovation, the Open University, London.
- Joe Rooney (2007) "William Kingdon Clifford", in Marco Ceccarelli, Distinguished figures in mechanism and machine science, Springer.
- Eduard Study (1891) "Von Bewegungen und Umlegung", Mathematische Annalen 39:520.
- Martin Baker www.euclidianspace.com
Categories:- Machines
- Kinematics
- Quaternions
























![AC = [A^+] C =
\begin{bmatrix}
a_0 & -A_3 & A_2 & A_1 \\
A_3 & a_0 & -A_1 & A_2 \\
-A_2 & A_1 & a_0 & A_3 \\
-A_1 & -A_2 & -A_3 & a_0
\end{bmatrix}
\begin{Bmatrix} C_1 \\ C_2 \\ C_3 \\ c_0 \end{Bmatrix}.](9/3799bf4a0f30c8399b7d9d1565c51ac3.png)
![AC = [C^-] A = \begin{bmatrix}
c_0 & C_3 & -C_2 & C_1 \\
-C_3 & c_0 & C_1 & C_2 \\
C_2 & -C_1 & c_0 & C_3 \\
-C_1 & -C_2 & -C_3 & c_0
\end{bmatrix}
\begin{Bmatrix} A_1 \\ A_2 \\ A_3 \\ a_0 \end{Bmatrix}.](2/aa23f999773194f37f39652e3946eeb2.png)
![\hat{A}\hat{C} = [\hat{A}^+]\hat{C} = \begin{bmatrix} A^+ & 0 \\ B^+ & A^+ \end{bmatrix}\begin{Bmatrix} C \\ D\end{Bmatrix}.](6/8b6afc0152a8a11650be2d6bfbd215cd.png)
![\hat{A}\hat{C} = [\hat{C}^-]\hat{A} = \begin{bmatrix} C^- & 0 \\ D^- & C^- \end{bmatrix}\begin{Bmatrix} A \\ B\end{Bmatrix}.](9/5397412cbb588d425d39700ab7ab688f.png)



![\hat{X} =[\hat{S}^+][\hat{S}^-]^*\hat{x}.](1/6411300d5e4bdd1b7cc70e5f4219510b.png)




![[R|t] = \begin{pmatrix}
& & & \Delta x \\
& R & & \Delta y \\
& & & \Delta z \\
0 & 0 & 0 & 1 \\
\end{pmatrix}](e/b6ef2278c87918b07a2b146013af0ee5.png)
Wikimedia Foundation. 2010.