- Omnidirectional camera
-
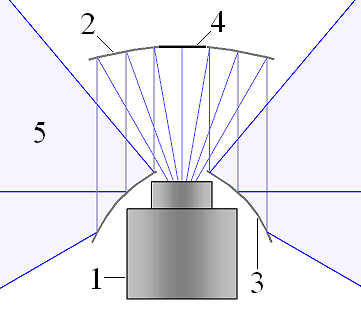
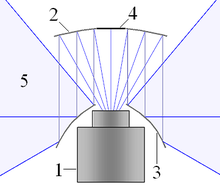 Schematic of an omnidirectional camera with two mirrors:
Schematic of an omnidirectional camera with two mirrors:
1. Camera
2. Upper Mirror
3. Lower Mirror
4. "Black Spot"
5. Field of View (light blue)In photography, an omnidirectional camera (from "omni", meaning all) is a camera with a 360-degree field of view in the horizontal plane, or with a visual field that covers (approximately) the entire sphere. Omnidirectional cameras are important in areas where large visual field coverage is needed, such as in panoramic photography and robotics.
Contents
Overview
 Omnidirectional Camera with two mirrors.
Omnidirectional Camera with two mirrors.
1. Camera
2. Lower Mirror
3. Aperture
4. Glass Housing
5. Cover and Upper Mirror (hidden)A camera normally has a field of view that ranges from a few degrees to, at most, 180°. This means that it captures, at most, light falling onto the camera focal point through a semi-sphere. In contrast, an ideal omnidirectional camera captures light from all directions falling onto the focal point, covering a full sphere. In practice, however, most omnidirectional cameras cover only almost the full sphere and many cameras which are referred to as omnidirectional cover only approximately a semi-sphere, or the full 360° along the equator of the sphere but excluding the top and bottom of the sphere. In the case that they cover the full sphere, the captured light rays do not intersect exactly in a single focal point.
Applications
Panoramic art
Traditional approaches to panoramic photography mainly consists of stitching shots taken separately into a single, continuous image. The stitching of images, however, is computationally intensive (for example using the RANSAC iterative algorithm, commonly used to solve the correspondence problem), and depending upon the quality and consistency of the shots used, the resulting image might contain a number of deficiencies which impair the quality of the resulting image. In contrast, an omnidirectional camera can be used to create panoramic art in real time, without the need for post processing, and will typically give much better quality products.
Robotics and computer vision
 A robot in the RoboCup Midsize league (2005), equipped with an omnidirectional camera.
A robot in the RoboCup Midsize league (2005), equipped with an omnidirectional camera.In robotics, omnidirectional cameras are frequently used for visual odometry and to solve the simultaneous localization and mapping (SLAM) problems visually.[1][2][3][4] Due to its ability to capture a 360-degree view, better results can be obtained for optical flow and feature selection and matching.
Miscellaneous
 Omnidirectional image of a corridor.
Omnidirectional image of a corridor.Applications of omnidirectional cameras also include surveillance, when it is important to cover an as large visual field as possible, teleconferencing, where it is of interest to include as many participants as possible in the same image.
An omnidirectional camera can be implemented in different ways, some of which are described below.
References
- ^ Scaramuzza, D.; Siegwart, R. (October 2008). "Appearance-Guided Monocular Omnidirectional Visual Odometry for Outdoor Ground Vehicles". IEEE Transactions on Robotics: 1–12. http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=4625958&isnumber=4359257. Retrieved 2008-10-20.
- ^ Ulrich, I.; Nourbakhsh, I. (2000). "Appearance-based place recognition for topological localization". Proc Ieee Int Conf Rob Autom 2: 1023–1029. http://www.cis.udel.edu/~cer/arv/readings/paper_ulrich.pdf. Retrieved 2008-07-15.
- ^ Kim, J.H.; Chung, M.J. (2003). "Slam with omni-directional stereo vision sensor". Intelligent Robots and Systems, 2003.(IROS 2003). Proceedings. 2003 IEEE/RSJ International Conference on. 1. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1250669.
- ^ Jogan, M.; Leonardis, A. (2000). "Robust localization using panoramic view-based recognition". 15th ICPR 4: 136–139. doi:10.1109/ICPR.2000.902882.
External links
Categories:- Cameras
- Image sensor technology in computer vision
- Omnidirectional cinema


Wikimedia Foundation. 2010.