- Nao (robot)
-
 A 2011 demonstration of Nao robots at Jaume I University, Spain.
A 2011 demonstration of Nao robots at Jaume I University, Spain.
Nao (pronounced "now") is an autonomous, programmable, medium-sized humanoid robot, developed by Aldebaran Robotics, a French startup company headquartered in Paris. Project Nao was launched in 2004. On August 15, 2007, Nao replaced Sony's robot dog Aibo as the robot used in the Robot Soccer World Cup (Robocup) Standard Platform League (SPL), an international robotics competition.[1] The Nao was used in RoboCup 2008 and 2009, and the NaoV3R was chosen as the platform for the SPL at RoboCup 2010.[2]
The Nao Academics Edition is available for universities and laboratories for research and education purposes, and is projected for public distribution by 2011. In October 2010, the University of Tokyo purchased 30 Nao robots for their Nakamura Lab, with hopes of developing the robots into active lab assistants.[3]
In the summer of 2010, Nao made global headlines with a synchronized dance routine at the Shanghai Expo in China.[4] In December 2010, a Nao robot was demonstrated doing a stand-up comedy routine,[5] and the latest version of the robot was released, featuring sculpted arms and improved motors.
Contents
Versions and availability
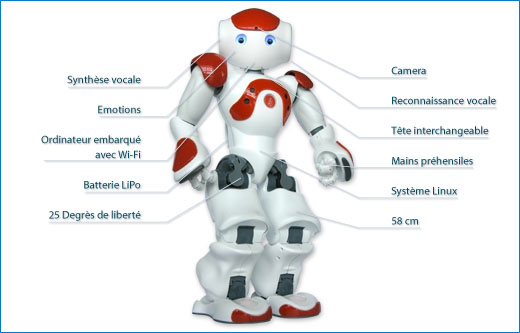
 A diagram of Nao's functions.
A diagram of Nao's functions.Six prototypes of Nao were designed between 2005 and 2007:
- January 2005 to March 2006: AL-01, AL-02 and AL-03
- September 2005 to July 2006: AL-04
- June 2006 to June 2007: AL-05.a
- May 2007 to December 2007: AL-05.b
On March 2008, the first finalized version of the robot, the Nao Robocup Edition, was released to the contestants of that year's Robocup.[6] The Nao Academics Edition was released to universities and education companies in late 2008.
In late 2010, the Nao Developer Program was launched[7] to allow developers to procure a Nao H25 Version 3.3, featuring longer arms, a new head and a new capacitive sensor on each hand.
In May 2011, Aldebaran announced it would release Nao's controlling source code to the public as open source.[8] In June 2011, Aldebaran raised US$13 million in a round of venture funding led by Intel Capital.[9]
A version of the robot for use by the general public is to be launched in late 2012.[10]
Specifications
Technical Specifications Height 58 cm Weight 4,3 kg Autonomy 90 min. (constant walking) Degrees of freedom 21 to 25 CPU x86 AMD Geode 500 MHz Built-in OS Linux Compatible OS Windows, Mac OS, Linux Programming languages C++, C, Python, Urbi, .Net Vision Two CMOS 640×480 cameras[11] Connectivity Ethernet, Wi-Fi The Nao Robocup Edition has 21 degrees of freedom (DOF), while the Academics Edition has 25 DOF, since it is built with two hands with gripping abilities. However, the figure of 25 for DOF is technically misleading, as each leg has a general "HipYawPitch" axis of movement that amounts to 1 DOF for the pelvis.
All versions feature an inertial measurement unit and four ultrasonic sensors that provide Nao with stability and positioning within space.
Nao also features a powerful multimedia system, including four microphones, two speakers and two CMOS cameras, for text-to-speech synthesis, sound localization and facial and shape recognition, amongst various other abilities.
The package includes a dedicated programming software called Aldebaran Choregraphe, and Nao is also compatible with Microsoft Robotics Studio, Cyberbotics Webots, and Gostai Urbi Studio.[12]
References
- ^ Nao robot replaces AIBO in RoboCup Standard Platform League, EnGadget.com, Aug 16, 2007
- ^ UK robots prepare for world cup
- ^ Le robot français Nao fait ses classes à l'Université de Tokyo
- ^ Robotic mascot entertains at Shanghai Expo
- ^ http://www.ted.com/talks/heather_knight_silicon_based_comedy.html
- ^ Standard Platform League, Tzi.de
- ^ Nao Developer Program
- ^ Aldebaran to Open Source NAO's code
- ^ Aldebaran raises $13million in round led by Intel Capital
- ^ Nao for private users
- ^ http://www.gizmag.com/nao-all-rounder-robot/13445/
- ^ Fiche produit de Nao Academics Edition v3.3, Aldebaran Robotics
External links
- Official website
- NaoForge (English) (French)
- Aldebaran's Youtube channel, showing latest research developments
Humanoid robots Legged MiniBioloid · Choromet · Coco · Evolta · FemiSapien · RoboSapien · Robosapien v2 · RS Media · HOAP · JO-ZERO · KHR-1 · KT-X · Nao · PALRO · PERSIA · PINO · Plen · QRIO · Robovie-PC · RX · SIGMOSmall / mediumHuman-sizedAtlas · ATOM-7xp · Honda E series · Honda P series · George · HRP-4 · IsaacRobot · Johnnie · Kiyomori · Kobian · Leonardo's robot · Manny · MAHRU / AHRA · Musa · Petman · SAM10 · SURALP · Surena · TOPIO · Wabian · Wabot · WASUBOT · WHL-11BigWheeled With tracks Upper torso Soccer robots Humanoid MiniNao · PERSIA (IAU)Small - mediumWheeled Other Categories:- Bipedal humanoid robots
- 2008 robots
- Robots of France
- Soccer robots

Wikimedia Foundation. 2010.