- Nereus (underwater vehicle)
-

NereusCareer (USA) 
Name: Nereus Owner: Woods Hole Oceanographic Institution (WHOI) Operator: WHOI Builder: WHOI Acquired: 1995 Commissioned: 2009 In service: 2009 Homeport: Woods Hole, Massachusetts, United States General characteristics Type: remotely operated underwater vehicle Tonnage: 2,800kg Length: 3.0 meters Installed power: electrical (rechargeable Lithium-ion batteries) Speed: 3 knots Test depth: 10902 meters Complement: unmanned Sensors and
processing systems:side-scan sonar & LED search lights Nereus is a hybrid autonomous underwater vehicle (HROV, a type of remotely operated underwater vehicle) built by the Woods Hole Oceanographic Institution (WHOI). Constructed as a research vehicle to operate at depths of up to 36,000 feet (11,000 m), it was designed to explore Challenger Deep, the deepest surveyed point in the global ocean. Nereus, named for Greek sea titan Nereus (who has a man's torso and a fish-tail) through a nationwide contest of high school and college students, began its deep sea voyage to Challenger Deep in May 2009 and reached the bottom on May 31, 2009.[1][2][3]
On this dive the Nereus reached a depth of 35,768 feet (10,902 m), making the Nereus the world's second deepest-diving vehicle currently in operation, and the first since 1998 to explore the Mariana Trench, the deepest part of the ocean known.[2][4]
Contents
Hybrid design
Being a hybrid ROV means that the vehicle can operate untethered, when near the surface, in order to explore large areas. To descend to great depths, however, it is tethered with a thin optic fiber cable, operated by pilots aboard the ship. This enables it to make deep dives while being highly maneuverable.[4] The optic fiber tether has the approximate diameter of a human hair, and can bear only 4 kilograms (8.8 pounds). It is made up of a thin layer of plastic surrounding a slender glass fiber core. The vehicle carries approximately 40 kilometers (25 mi) of cable wound in two small canisters that play out the fiber as the vehicle descends. This slim tether is smaller, lighter, and more cost effective than cable.[4]
Nereus weighs approximately 3 tons in air and is about 4.25 meters (14 feet) long and 2.3 meters (8 feet) wide. Approximately 2,000 lithium-ion batteries provide its power. The vehicle makes use of two precisely designed ceramic spheres or hulls for flotation devices, rather than using the much heavier syntactic foam that is typically used for submersible vehicles. Each hull contains between 700 and 800 9-cm (3.5-inch) hollow spheres that are specifically designed to handle intense pressure. Nereus has a lightweight robotic manipulator arm to conduct the sample collecting that operates hydraulically and is able to perform under intense pressure.[5]
As an alternative to the tether, the Nereus can be switched to a free-swimming mode and operated as an autonomous vehicle and hover, similar to a helicopter, over the ocean floor.[4] In designing the vehicle, the design team relied on previous experience in developing autonomous underwater vehicles (AUVs) and tethered robots to build a hybrid vehicle that could both fly like an aircraft to explore large areas of the ocean floor, but would be easily converted into a remotely operated vehicle (ROV) able to hover over the small areas to conduct experiments or collect samples of rocks and sea life.[5]
Deepest dive
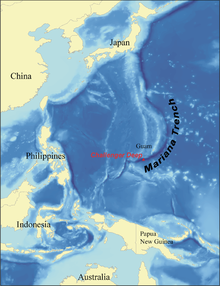
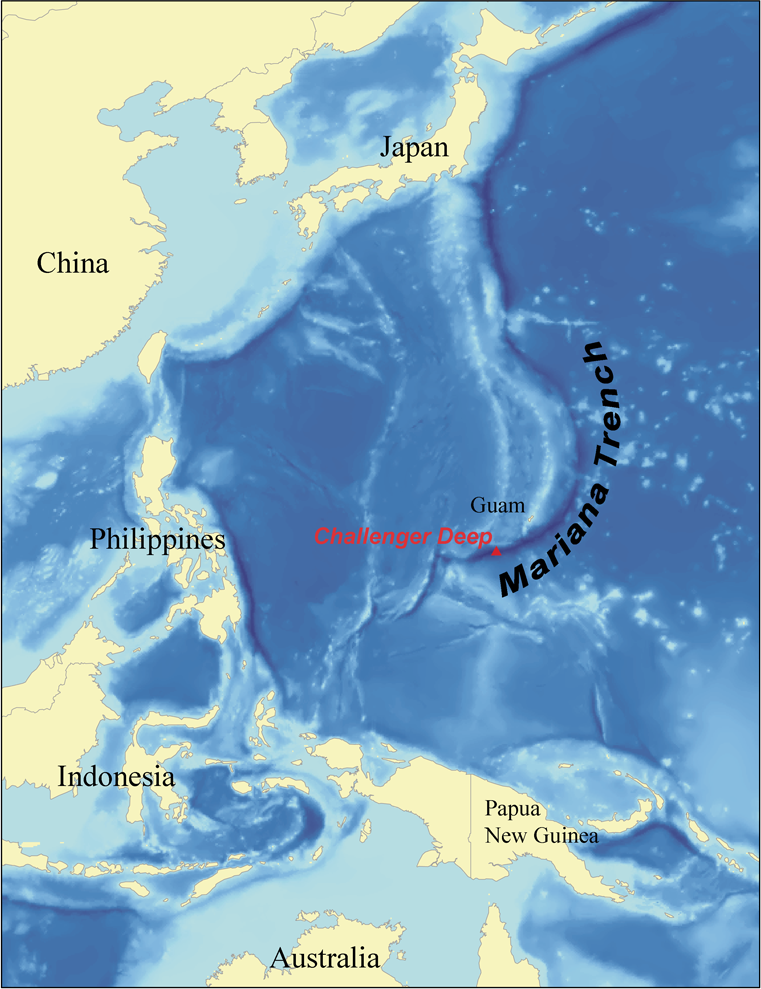
The Challenger Deep is located in the Western Pacific Ocean near the island of Guam in the Mariana Trench, the deepest known part of an ocean on earth, and the deepest known location on earth.[6] The May 2009 dive by the Nereus achieved a depth of 10,902 meters (6.8 miles), making it the world's deepest-diving vehicle currently in operation, and the first since 1998 to explore the Mariana Trench.[4] To accomplish this dive, the vehicle had to sustain pressures over 1,000 times the atmospheric pressure at the Earth's surface.[5] It hovered over the trench for more than 10 hours and sent back live video to the mother ship.[2]
Nereus is the third vehicle in the world to reach the bottom of the Pacific Ocean's Challenger Deep. The first was the manned Bathyscaphe Trieste, which carried U.S. Navy Lieutenant Don Walsh and Swiss engineer Jacques Piccard and made the voyage on January 23, 1960. This is the only manned voyage to the Challenger Deep on record. The Nereus dive aimed for the same spot. On 24 March 1995 a Japanese robotic deep-sea probe called Kaikō made the first unmanned trip to the Challenger Deep.[7]
Once at the bottom, Nereus collected liquid and rock specimens. Patricia Fryer, co-chief scientist of the expedition, said the following about the samples.
"We want to know how all of this relates to subduction around the globe, changes in the chemistry of the ocean in general and, therefore, potential effects those changes may have on ocean-atmosphere interactions and things like global climate change."[8]
Future missions
The Mariana Trench is part of the Pacific Ring of Fire, a 25,000 mile area that is the location of most of the volcanic eruptions and earthquakes in the world and is the boundary between two tectonic plates. Here, the Pacific Plate is subducted under the Mariana Plate. It is hoped that the Nereus missions will provide valuable information about plate tectonics. The principal developer of the Nereus, Andy Bowen of the Woods Hole Oceanographic Institution said, "The trenches are virtually unexplored, and I am absolutely certain Nereus will enable new discoveries. I believe it marks the start of a new era in ocean exploration."[2] He described the achievement of the Nereus in diving to such an extreme ocean depth as "the pinnacle of technical challenges".[5]
See also
References
- ^ Harlow, John (22 February 2009). "Old rivalries surface as US races to sea's deepest spot". London: The Sunday Times UK. http://www.timesonline.co.uk/tol/news/world/us_and_americas/article5780440.ece. Retrieved 2009-02-22.
- ^ a b c d "Robot sub reaches deepest ocean". BBC. 2009-06-03. http://news.bbc.co.uk/2/hi/science/nature/8080324.stm. Retrieved 2009-06-03.
- ^ Bates, Claire (2009-06-03). "Robot submarine dives to the deepest part of the ocean controlled by a 7-mile cable as thin as single human hair". Daily Mail (London). http://www.dailymail.co.uk/sciencetech/article-1190486/Robot-submarine-Nereus-dives-deepest-ocean-7-mile-cable-human-hair.html. Retrieved 2009-06-03.
- ^ a b c d e "Hybrid remotely operated vehicle 'Nereus' reaches deepest part of the ocean". www.physorg.com. http://www.physorg.com/news163167519.html. Retrieved 2009-06-11.
- ^ a b c d "Exploring the Deepest Part of the Ocean - Mariana Trench". geology.com. http://geology.com/press-release/deepest-part-of-the-ocean/. Retrieved 2009-06-11.
- ^ "The Mariana Trench". www.marianatrench.com. http://www.marianatrench.com/default.htm. Retrieved 2009-06-11.
- ^ Bates, Claire (2009-06-04). "Robot submarine Nereus dives to the deepest part of the ocean via 7-mile cable as thin as a human hair". London: www.dailymail.co.uk. http://www.dailymail.co.uk/sciencetech/article-1190486/Robot-submarine-Nereus-dives-deepest-ocean-7-mile-cable-human-hair.html. Retrieved 2009-06-11.
- ^ Altonn, Helen. "Robot sub helps collect deep-ocean specimens". Star-Bulletin. http://www.starbulletin.com/news/20090622_robot_sub_helps_collect_deep_ocean_specimens.html. Retrieved 2009-08-12.
External links
Ships of the Woods Hole Oceanographic Institution Ships: DSV: ROVs: ROV Jason • ROV Jason Jr. • ROV Medea • ROV Nereus • ROV ANGUS • ROV Argo • AUV:
List of research vessels of the United States
Categories:- Robotic submarines
- Autonomous underwater vehicles
- Woods Hole Oceanographic Institution

Wikimedia Foundation. 2010.