- Topological sorting
-
"Dependency resolution" redirects here. For other uses, see Dependency (disambiguation).
In computer science, a topological sort or topological ordering of a directed graph is a linear ordering of its vertices such that, for every edge uv, u comes before v in the ordering. For instance, the vertices of the graph may represent tasks to be performed, and the edges may represent constraints that one task must be performed before another; in this application, a topological ordering is just a valid sequence for the tasks. A topological ordering is possible if and only if the graph has no directed cycles, that is, if it is a directed acyclic graph (DAG). Any DAG has at least one topological ordering, and algorithms are known for constructing a topological ordering of any DAG in linear time.
Contents
Examples
The canonical application of topological sorting (topological order) is in scheduling a sequence of jobs or tasks; topological sorting algorithms were first studied in the early 1960s in the context of the PERT technique for scheduling in project management (Jarnagin 1960). The jobs are represented by vertices, and there is an edge from x to y if job x must be completed before job y can be started (for example, when washing clothes, the washing machine must finish before we put the clothes to dry). Then, a topological sort gives an order in which to perform the jobs.
In computer science, applications of this type arise in instruction scheduling, ordering of formula cell evaluation when recomputing formula values in spreadsheets, logic synthesis, determining the order of compilation tasks to perform in makefiles, and resolving symbol dependencies in linkers.
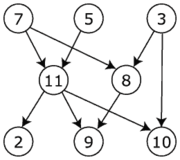
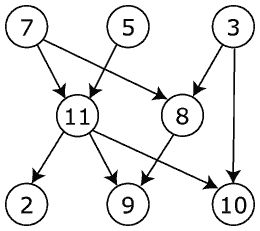
The graph shown to the left has many valid topological sorts, including: - 7, 5, 3, 11, 8, 2, 9, 10 (visual left-to-right, top-to-bottom)
- 3, 5, 7, 8, 11, 2, 9, 10 (smallest-numbered available vertex first)
- 3, 7, 8, 5, 11, 10, 2, 9
- 5, 7, 3, 8, 11, 10, 9, 2 (fewest edges first)
- 7, 5, 11, 3, 10, 8, 9, 2 (largest-numbered available vertex first)
- 7, 5, 11, 2, 3, 8, 9, 10
Algorithms
The usual algorithms for topological sorting have running time linear in the number of nodes plus the number of edges (
 ).
).One of these algorithms, first described by Kahn (1962), works by choosing vertices in the same order as the eventual topological sort. First, find a list of "start nodes" which have no incoming edges and insert them into a set S; at least one such node must exist in an acyclic graph. Then:
L ← Empty list that will contain the sorted elements S ← Set of all nodes with no incoming edges while S is non-empty do remove a node n from S insert n into L for each node m with an edge e from n to m do remove edge e from the graph if m has no other incoming edges then insert m into S if graph has edges then output error message (graph has at least one cycle) else output message (proposed topologically sorted order: L)If the graph were a DAG, a solution is contained in the list L (the solution is not necessarily unique). Otherwise, the graph has at least one cycle and therefore a topological sorting is impossible.
Note that, reflecting the non-uniqueness of the resulting sort, the structure S can be simply a set or a queue or a stack. Depending on the order that nodes n are removed from set S, a different solution is created. A variation of Kahn's algorithm that breaks ties lexicographically forms a key component of the Coffman–Graham algorithm for parallel scheduling and layered graph drawing.
An alternative algorithm for topological sorting is based on depth-first search. For this algorithm, the edges are examined in the opposite direction as the previous one (it looks for nodes with edges pointing to a given node instead of from it, which might set different requirements for the data structure used to represent the graph; and it starts with the set of nodes with no outgoing edges). The algorithm loops through each node of the graph, in an arbitrary order, initiating a depth-first search that terminates when it hits any node that has already been visited since the beginning of the topological sort:
L ← Empty list that will contain the sorted nodes S ← Set of all nodes with no outgoing edges for each node n in S do visit(n) function visit(node n) if n has not been visited yet then mark n as visited for each node m with an edge from m to n do visit(m) add n to LNote that each node n gets added to the output list L only after considering all other nodes on which n depends (all ancestor nodes of n in the graph). Specifically, when the algorithm adds node n, we are guaranteed that all nodes on which n depends are already in the output list L: they were added to L either by the preceding recursive call to visit(), or by an earlier call to visit(). Since each edge and node is visited once, the algorithm runs in linear time. Note that the simple pseudocode above cannot detect the error case where the input graph contains cycles. The algorithm can be refined to detect cycles by watching for nodes which are visited more than once during any nested sequence of recursive calls to visit() (e.g., by passing a list down as an extra argument to visit(), indicating which nodes have already been visited in the current call stack). This depth-first-search-based algorithm is the one described by Cormen et al. (2001); it seems to have been first described in print by Tarjan (1976).
Uniqueness
If a topological sort has the property that all pairs of consecutive vertices in the sorted order are connected by edges, then these edges form a directed Hamiltonian path in the DAG. If a Hamiltonian path exists, the topological sort order is unique; no other order respects the edges of the path. Conversely, if a topological sort does not form a Hamiltonian path, the DAG will have two or more valid topological orderings, for in this case it is always possible to form a second valid ordering by swapping two consecutive vertices that are not connected by an edge to each other. Therefore, it is possible to test in polynomial time whether a unique ordering exists, and whether a Hamiltonian path exists, despite the NP-hardness of the Hamiltonian path problem for more general directed graphs (Vernet & Markenzon 1997).
Relation to partial orders
Topological orderings are also closely related to the concept of a linear extension of a partial order in mathematics.
A partially ordered set is just a set of objects together with a definition of the "≤" inequality relation, satisfying the axioms of asymmetry (x ≤ y and y ≤x if and only if x = y) and transitivity (if x ≤ y and y ≤ z, then x ≤ z). A total order is a partial order in which, for every two objects x and y in the set, either x ≤ y or y ≤ x. Total orders are familiar in computer science as the comparison operators needed to perform comparison sorting algorithms. For finite sets, total orders may be identified with linear sequences of objects, where the "≤" relation is true whenever the first object precedes the second object in the order; a comparison sorting algorithm may be used to convert a total order into a sequence in this way. A linear extension of a partial order is a total order that is compatible with it, in the sense that, if x ≤ y in the partial order, then x ≤ y in the total order as well.
One can define a partial ordering from any DAG by letting the set of objects be the vertices of the DAG, and defining x ≤ y to be true, for any two vertices x and y, whenever there exists a directed path from x to y; that is, whenever y is reachable from x. With these definitions, a topological ordering of the DAG is the same thing as a linear extension of this partial order. Conversely, any partial ordering may be defined as the reachability relation in a DAG. One way of doing this is to define a DAG that has a vertex for every object in the partially ordered set, and an edge xy for every pair of objects for which x ≤ y. An alternative way of doing this is to use the transitive reduction of the partial ordering; in general, this produces DAGs with fewer edges, but the reachability relation in these DAGs is still the same partial order. By using these constructions, one can use topological ordering algorithms to find linear extensions of partial orders.
See also
- tsort, a Unix program for topological sorting
- Feedback arc set, a (possibly empty) set of arcs which, if removed from the graph, make it possible to topologically sort it. Useful for dealing with graphs with cycles.
References
- Cormen, Thomas H.; Leiserson, Charles E.; Rivest, Ronald L.; Stein, Clifford (2001), "Section 22.4: Topological sort", Introduction to Algorithms (2nd ed.), MIT Press and McGraw-Hill, pp. 549–552, ISBN 0-262-03293-7.
- Jarnagin, M. P. (1960), Automatic machine methods of testing PERT networks for consistency, Technical Memorandum No. K-24/60, Dahlgren, Virginia: U. S. Naval Weapons Laboratory.
- Kahn, A. B. (1962), "Topological sorting of large networks", Communications of the ACM 5 (11): 558–562, doi:10.1145/368996.369025.
- Tarjan, Robert E. (1976), "Edge-disjoint spanning trees and depth-first search", Algorithmica 6 (2): 171–185, doi:10.1007/BF00268499.
- Vernet, Oswaldo; Markenzon, Lilian (1997), "Hamiltonian problems for reducible flowgraphs", Proc. 17th International Conference of the Chilean Computer Science Society (SCCC '97), pp. 264–267, doi:10.1109/SCCC.1997.637099.
External links
- NIST Dictionary of Algorithms and Data Structures: topological sort
- Weisstein, Eric W., "TopologicalSort" from MathWorld.
Sorting algorithms Theory Exchange sorts Selection sorts - Selection sort
- Heapsort
- Smoothsort
- Cartesian tree sort
- Tournament sort
- Cycle sort
Insertion sorts Merge sorts Distribution sorts Concurrent sorts - Bitonic sorter
- Batcher odd–even mergesort
- Pairwise sorting network
Hybrid sorts - Timsort
- Introsort
- Spreadsort
- UnShuffle sort
- JSort
Quantum sorts Other - Bogosort
- Topological sorting
- Pancake sorting
Categories:- Graph algorithms
- Sorting algorithms
- Directed graphs
Wikimedia Foundation. 2010.