- Moving target indication
-
Moving target indication (MTI) is a mode of operation of a radar to discriminate a target against clutter. [1]
In contrast to another mode, stationary target indication, it takes an advantage of the fact that the target moves with respect to stationary clutter. The most common approach takes advantage of the Doppler effect. For a sequence of radar pulses the moving target will be at different distance from the radar and the phase of the radar return from the target will be different for successive pulses, while the returns from stationary clutter will arrive at the same phase shift. [1]
Radar MTI may be specialized in terms of the type of clutter and environment: airborne MTI (AMTI), ground MTI (GMTI), etc., or may be combined mode: stationary and moving target indication (SMTI).
Contents
Operation
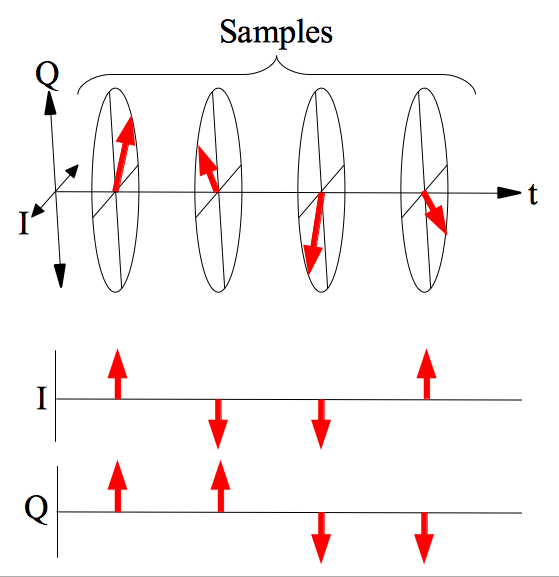
 Moving target indicator signal sampling process.
Moving target indicator signal sampling process.
Moving target indicator (MTI) begins with sampling for two pulses. This starts immediately after the radar transmit pulse ends and sampling continues until the next transmit pulse begins.
Sampling is repeated in the same locations after the next transmit pulse, and the sample taken at the same distance from the first pulse is rotated 180 degrees and added to this sample. This is called destructive interference.
If an object is moving in the location corresponding to both samples, then the signal reflected from the object will survive this process, otherwise the two samples will cancel and very little signal will remain if all objects are stationary at that distance.
High power microwave devices, like crossed-field amplifier, are not phase-stable. The phase of each transmit pulse is different from the previous and future transmit pulses. This phenomenon is called phase jitter.
In order for MTI to work, the initial phase of both transmit pulses must be sampled and the 180 degree phase rotation must be adjusted to achieve signal cancellation on stationary objects.
A secondary influence is that phase rotation is induced by Doppler, and that creates blind velocities. For example, an object moving at 75 m/s (170 mile/hour) will produce 180 degree phase shift each 1 millisecond at L band.
If the pulse repetition interval is 0.002s between transmit pulses, then the MTI process will produce 360o phase rotation. That is the same as a stationary object, which renders the system blind to objects traveling at this radial velocity.
MTI requires 3 or 4 pulses to reduce the effect of blind velocities. Multi-pulse strategies use staggered pulses with irregular pulse repetition intervals to prevent signal cancellation on moving objects. The summation process is slightly different to accommodate the additional samples.
Phase jitter, Doppler effects, and environmental influences limit MTI sub-clutter visibility Measure of Performance to about 25dB improvement. This allows moving objects about 300 times smaller to be detected in close proximity to larger stationary objects.
Pulse-Doppler signal processing is required to achieve greater sub-clutter visibility.
Characteristics
A target is traveling at velocity vp at a maximum range Rmax with elevation angle EL and azimuth AZ in respect to a bistatic MTI radar.
Probability of Detection (Pd)
The probability of detecting a given target at a given range any time the radar beam scans across it, Pd is determined by factors that include the size of the antenna and the amount of power it radiates. A large antenna radiating at high power provides the best performance. For high quality information on moving targets the Pd must be very high.
Target Location Accuracy
Location accuracy is a dependent on the certainty of the position of the radar, the radar-pointing accuracy, azimuth resolution, and range resolution. A long antenna or very short wave length can provide fine azimuth resolution. Short antennas tend to have a larger azimuth error, an error that increases with range to the target because signal-to-noise ratio varies inversely with range. Location accuracy is vital to tracking performance because it prevents track corruption when there are multiple targets and makes it possible to determine which road a vehicle is on if it is moving in an area with many roads.
The target location accuracy is proportional to the slant range, frequency and aperture length.
Target Range Resolution (High Range Resolution or HRR)
Target range resolution determines whether two or more targets moving in close proximity will be detected as individual targets. With higher performance radars, target range resolution—known as High Range Resolution (HRR)—can be so precise that it may be possible to recognize a specific target (i.e., one that has been seen before) and to place it in a specific class (e.g., “a T-80 tank”). This would allow more reliable tracking of specific vehicles or groups of vehicles, even when they are moving in dense traffic or disappear for a period due to screening.
Minimum Detectable Velocity MDV
The MDV comes from the frequency spread of the mainlobe clutter. MDV determines whether traffic will be detected. A GMTI radar must distinguish a moving target from ground clutter by using the target’s Doppler signature to detect the radial component of the target’s velocity vector (i.e., by measuring the component of the target’s movement directly along the radar-target line). To capture most of this traffic, even when it is moving almost tangentially to the radar (i.e., perpendicular to the radar-target line), a system must have the ability to detect very slow radial velocities. As the radial component of a target’s velocity approaches zero, the target will fall into the clutter or blind zone. This is calculated as:

Any target with a velocity less than this minimum (MDV) cannot be detected because there is not sufficient Doppler shift in its echo to separate it from the mainlobe clutter return.
Area Search Rate
The area coverage rate (measured in area per unit time) is proportional to system power and aperture size. Other factors which may be relevant include grid spacing, size of the power amp, module quantization, the number of beams processed and system losses.
Stand-off Distance
Stand-off distance is the distance separating a radar system from the area it is covering.
Coverage Area Size (breadth and depth)
Coverage area size is the area that the system can keep under continuous surveillance from a specific orbit. Well known design principles cause a radar’s maximum detection range to depend on the size of its antenna (radar aperture), the amount of power radiated from the antenna, and the effectiveness of its clutter cancellation mechanism. The earth’s curvature and screening from terrain, foliage, and buildings cause system altitude to be another key factor determining depth of coverage. The ability to cover an area the size of an army corps commander’s area of interest from a safe stand-off distance is the hallmark of an effective, advanced GMTI system.
Coverage Area Revisit Rate
This equates to the frequency with which the radar beam passes over a given area. Frequent revisits are very important to the radar’s ability to achieve track continuity and contribute to an increased probability of target detection by lessening the chance of obscuration from screening by trees, buildings, or other objects. A fast revisit rate becomes critical to providing an uncorrupted track when a target moves in dense traffic or is temporarily obscured, if only by trees along a road.
See also
References
- ^ a b Jerry C. Whitaker (2005) The Electronics Handbook, ISBN 0849318890, p. 1824
Categories:- Radar signal processing
- Targeting (warfare)

Wikimedia Foundation. 2010.