Differential wheeled robot
- Differential wheeled robot
-

A three wheeled differentially steered robot
A differential wheeled robot is a mobile robot whose movement is based on two separately driven wheels placed on either side of the robot body. It can thus change its direction by varying the relative rate of rotation of its wheels and hence does not require an additional steering motion.
More number of wheels (not driven) may be added to the robot for additional balance.
Details
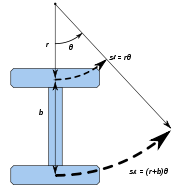
Path of wheels through a turn.
The wheels are not connected,
despite how it appears.
If both the wheels are driven in the same direction and speed, the robot will go in a straight line. Otherwise, depending on the speed of rotation and its direction, the centre of rotation may fall anywhere in the line joining the two wheels. Since the direction of the robot is dependent on the rate and direction of rotation of the two driven wheels, these quantities should be sensed and controlled precisely. This usually creates some problem. If both wheels are turned with equal speed in opposite directions, as it is clear from the diagram shown, the robot will rotate about the central point of the axis.
A differentially steered robot is similar to the differential gears used in automobiles in that both the wheels can have different rates of rotations, but unlike the differential gearing system,a differentially steered system will have both the wheels powered. Differential wheeled robots are used extensively in robotics, since their motion is easy to program and can be well controlled. Virtually all consumer robots on the market today use differential steering primarily for its low cost and simplicity.
Examples of differential wheeled robots
External links
Categories: - Differential wheeled robots
Wikimedia Foundation.
2010.
Look at other dictionaries:
Marvin (robot) — For the character from The Hitchhiker s Guide to the Galaxy, see Marvin the Paranoid Android. Mobile Autonomous Robot Vehicle for Indoor Navigation (Marvin) is a mobile robot developed at Robotics Lab at University of Kaiserslautern, Germany.… … Wikipedia
Khepera mobile robot — The Khepera is a small (5.5 cm) differential wheeled mobile robot that was developed at the LAMI laboratory of Prof. Jean Daniel Nicoud at EPFL (Lausanne, Switzerland) in the mid 90s. It was developed by Edo. Franzi, Francesco Mondada, André… … Wikipedia
S-bot mobile robot — The s bot is a small (15 cm) differential wheeled (with additional tracks) mobile robot developed at the LIS (Laboratory of Intelligent Systems [http://lis.epfl.ch/] ) at the EPFL in Lausanne, Switzerland between 2001 and 2004. Targeted to swarm… … Wikipedia
E-puck mobile robot — The e puck is a small (7 cm) differential wheeled mobile robot. It was originally designed for micro engineering education by Michael Bonani and Francesco Mondada at the ASL laboratory of Prof. Roland Siegwart at EPFL (Lausanne, Switzerland). The … Wikipedia
Topic outline of robotics — Robotics is the science and technology of designing, making, and applying robots, including theory from many contributing fields. A robot is a mechanical or virtual, artificial . It is usually an electromechanical system, which, by its appearance … Wikipedia
Dead reckoning — For other uses, see Dead reckoning (disambiguation). The navigator plots his 9am position, indicated by the triangle, and, using his course and speed, estimates his position at 9:30am and 10am. In navigation, dead reckoning (also ded (for… … Wikipedia
Mathematics and Physical Sciences — ▪ 2003 Introduction Mathematics Mathematics in 2002 was marked by two discoveries in number theory. The first may have practical implications; the second satisfied a 150 year old curiosity. Computer scientist Manindra Agrawal of the… … Universalium
Bicycle and motorcycle dynamics — A computer generated, simplified model of bike and rider demonstrating an uncontrolled right turn. An … Wikipedia
Military equipment of Turkey — The military equipment of Turkey includes a wide array of arms, artilleries, large surface vessels, cannons, armored vehicles, mortars, unmanned vehicles and many different equipments. Contents 1 Historical development 1.1 General 1.2 1923 1950 … Wikipedia
Timeline of computing hardware 2400 BC–1949 — History of computing Hardware before 1960 Hardware 1960s to present Hardware in Soviet Bloc countries Artificial intelligence Computer science Operating systems Programming languages … Wikipedia


