- Introduction to mathematics of general relativity
An understanding of
calculus anddifferential equation s is necessary for the understanding ofnonrelativistic physics . In order to understandspecial relativity one also needs an understanding oftensor calculus . To understand the general theory of relativity, one needs a basic introduction to the mathematics of curved spacetime that includes a treatment ofcurvilinear coordinates , nontensors, curved space,parallel transport ,Christoffel symbols ,geodesic s, covariant differentiation, thecurvature tensor ,Bianchi identity , and theRicci tensor . This article follows the basic treatment in the lecture series on the topic, intended for advanced undergraduates, given byPaul Dirac atFlorida State University . (Dirac 1996)All the mathematics discussed in this article were known before Einstein's general theory of relativity.
For an introduction based on the specific physical example of particles orbiting a large mass in
circular orbit s, seeNewtonian motivations for general relativity for a nonrelativistic treatment andTheoretical motivation for general relativity for a fully relativistic treatment.Mathematics of special relativity
Vectors
Interval between two points
Spacetime physics requires four coordinates for the description of a point in spacetime:
:
where c is the
speed of light and x, y, and z are spatial coordinates.A point very close to our original point is
:.
The square of the distance, or interval, between the two points is
:
and is invariant under coordinate transformations. Here we are using the
Minkowski metric .Coordinate transformations
Transformation of dx
If one defines a new coordinate system such that
:
then
:
where repeated indices are summed according to the
Einstein summation convention .The comma in the subscript of the last term indicates differentiation.
Transformation of a scalar
A scalar quantity transforms as
:.
Contravariant vectors
Quantities that transform in the same way as under a change of coordinates,
:,
form a
contravariant vector . The squared length of the vector is the invariant quantity:.
The term on the left is the notation for the
inner product of A with itself.Covariant vectors
The
covariant vector is defined as:.
It transforms as
:.
Inner product
The inner product of two vectors is written
:.
This quantity is also invariant under coordinate transformations.
Tensors
Definition
A rank-2 contravariant tensor can be constructed from the
outer product of vectors as:.
Contravariant tensor
The components of a rank 2 contravariant tensor transform in the same way as the quantities ,
:
Covariant and mixed tensors
Higher rank tensors are constructed similarly as are covariant and mixed tensors. For a rank 2 covariant tensor, the transformation is
:.
Oblique axes
The interval and the metric tensor
An oblique coordinate system is one in which the axis are not necessarily
orthogonal to each other. For oblique axes, the interval is:
where the coefficients , called the
metric tensor depend on the system of oblique axes.Determinant of the metric tensor
The determinant of is denoted and is always negative for any real coordinate axes.
Inner product
The inner product of any two vectors
:
is invariant.
Relation between covariant and contravariant tensors
Covariant tensors can be converted to and from contravariant tensors by
:
and
:
where is the cofactor of the corresponding
and
:.
Nontensors
A nontensor is a tensor-like quantity that behaves like a tensor in the raising and lowering of indices,
:
and
:,
but that does not transform like a tensor under a coordinate transformation.
Mathematics of general relativity
Curvilinear coordinates and curved spacetime
Curvilinear coordinates are coordinates in which the angles between axes can change from point-to-point. In other words, the metric tensor in curvilinear coordinates is no longer a constant, but depends upon the spacetime location of the metric tensor. The metric tensor is therefore a field quantity.Like the surface of a ball embedded in three-dimensional space, we can imagine four-dimensional spacetime as embedded in a flat space of a higher dimension. The coordinates on the surface of the ball are curvilinear, while the coordinates in three-dimensional space can be rectilinear. While the coordinates of four-dimensional, curved spacetime are curvilinear; the coordinates of four-dimensional spacetime are embedded in a larger, N-dimensional space of rectilinear (flat) coordinates.
Parallel transport
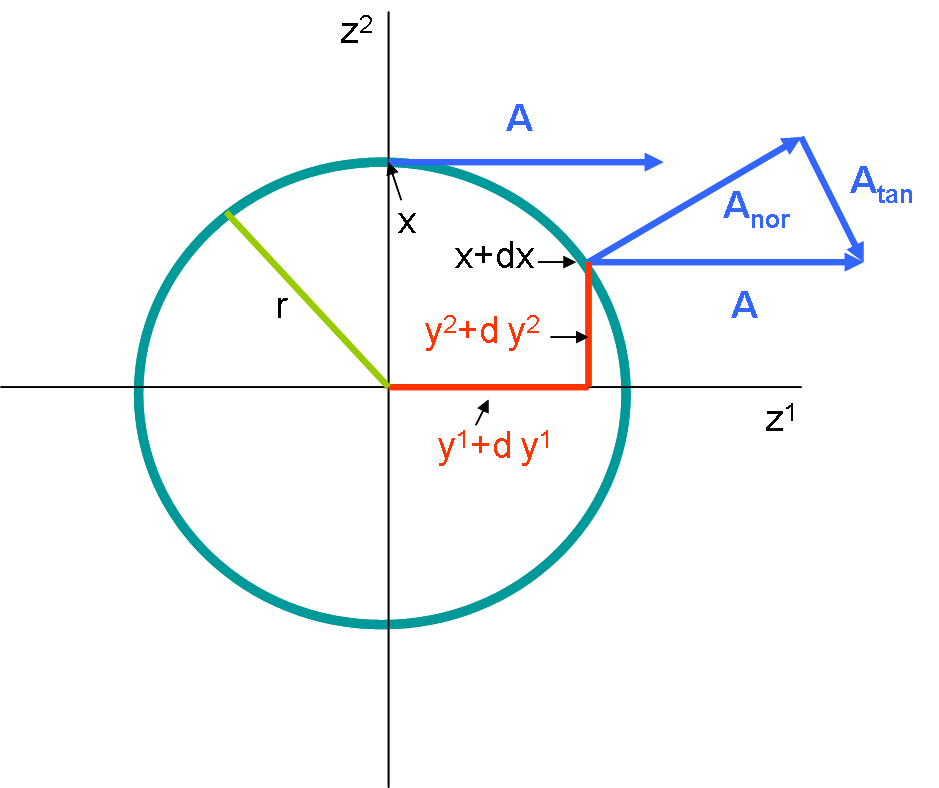
thumb|450px|right|Example: Parallel displacement along a circle of a three-dimensional ball embedded in two dimensions. The circle of radius r is embedded in a two-dimensional space characterized by the coordinates "> and . The circle itself is characterized by coordinates and in the two dimensional space. The circle itself is one-dimensional and can be characterized by its arc length x. The coordinate y is related to the coordinate x through the relation and . This givesand
.
In this case the metric is a scalar and is given by
.
The interval is then
.
The interval is just equal to the arc length as expected.
The interval in a high dimensional space
Imagine our four-dimensional, curved spacetime is embedded in a larger N dimensional flat space. Any true physical vector lies entirely in the curved physical space. In other words, the vector is
tangent to the curved physical spacetime. It has no component normal to the four-dimensional, curved spacetime.In the N dimensional flat space with coordinates the interval between neighboring points is
:
where is the metric for the flat space. We do not assume the coordinates are orthogonal, only rectilinear.
The relation between neighboring contravariant vectors: Christoffel symbols
The difference in for two neighboring points in the surface differing by is
:
where
:
The interval between two neighboring points in physical spacetime becomes
:
where
:
A contravariant vector at a point x in physical spacetime is related to the same contravariant vector at the same point in N-dimensional space by the relation
:
The vector lies in the surface of physical spacetime.
Now shift the vector to the point keeping it parallel to itself. In other words, we hold the components of the vector constant during the shift. The vector no longer lies in the surface because of curvature of the surface.
The shifted vector can be split into two parts, one tangent to the surface and one normal to surface, as
:.
Let be the components of in the "x" coordinate system. This transformation is given by:
:.
The normal vector is normal to every vector in the surface including the unit vectors that define the components of . Therefore
:.
This allows us to write
:
or
:
where
:
is a nontensor called the
Christoffel symbol of the first kind. It can be shown to be related to the metric tensor through the relation:.
Since the Christoffel symbol can be written entirely in terms of the metric in physical spacetime, all reference to the N-dimensional space has disappeared.
Christoffel symbol of the second kind
The Christoffel symbol of the second kind is defined as
:.
This operation is allowed for nontensors.
This allows us to write
:
and
:.
The minus sign in the second expression can be seen from the invariance of an inner product of two vectors
:.
The constancy of the length of the parallel displaced vector
From Dirac:
:
The constancy of the length of the vector follows from geometrical arguments. When we split up the vector into tangential and normal parts ... the normal part is infinitesimal and is orthogonal to the tangential part. It follows that, to the first order, the length of the whole vector equals that of its tangential part.
The covariant derivative
The partial derivative of a vector with respect to a spacetime coordinate is composed of two parts, the normal partial derivative minus the change in the vector due to parallel transport
:
It is relatively easy to prove that the
metric tensor is covariantly constant, i.e. for any choice of .The covariant derivative of a product is:
that is, the covariant derivative satisfies the
product rule (due toGottfried Leibniz ).Geodesics
Suppose we have a point that moves along a track in physical spacetime. Suppose the track is parameterized with the quantity . The "velocity" vector that points in the direction of motion in spacetime is
:
The variation of the velocity upon parallel displacement along the track is then
:
If there are no "forces" acting on the point, then the velocity is unchanged along the track and we have
:
which is called the geodesic equation.
Curvature tensor
Definition
The curvature K of a surface is simply the angle through which a vector is turned as we take it around an infinitesimal closed path. For a two dimensional Euclidean surface we have
:.
For a triangle on a spherical surface the angle is the excess (over 180 degrees) of the sum of the angles of the triangle. For a spherical surface of radius r, the curvature is
:.
The definition of curvature generalizes to
:
where is an arbitrary vector transported around a closed loop of area along the and directions. Here,
:
This expression can be reduced to the commutation relation
:
where
:.
In flat spacetime, the derivatives commute and the curvature is zero.
ymmetries of the curvature tensor
The curvature tensor is antisymmetric in the last two indices
:.
Also
:
:
and
:.
A consequence of the symmetries is that the curvature tensor has only 20 independent components.
Bianchi identity
The following differential relation, known as the
Bianchi identity is true.:
Ricci tensor and scalar curvature
The
Ricci tensor is defined as the contraction:.
A second contraction yields the
scalar curvature :.
It can be shown that consequence of the Bianchi identity is
:.
ee also
*
Riemannian geometry
*Differential geometry and topology
*List of differential geometry topics
*General Relativity References
*
*
*
*
*
Wikimedia Foundation. 2010.