- Pseudospectral optimal control
Pseudospectral (PS) optimal control is a computational method for solving
optimal control problems. PS optimal controllers have beenextensively used to solve a wide range of problems such as those arising in UAV trajectory generation, missile guidance, control of robotic arms, vibration damping, lunar guidance, magnetic control, swing-up and stabilization of an inverted pendulum, orbit transfers, tether libration control, and ascent guidance. [Q. Gong, W. Kang, N. Bedrossian, F. Fahroo, P. Sekhavat and K. Bollino, Pseudospectral Optimal Control for Military and Industrial Applications, "46th IEEE Conference on Decision and Control", New Orleans, LA, pp. 4128-4142, Dec. 2007.]Overview
Pseudospectral (PS) optimal control is a powerful computational method for solving complex nonlinear control problems. Various pseudospectral
optimal control algorithms have been developed since the 1990s [Elnagar, J., Kazemi, M. A. and Razzaghi, M., The PseudospectralLegendre Method for Discretizing Optimal Control Problems,"IEEE Transactions on Automatic Control", Vol. 40, No. 10, 1995, pp.1793-1796] [F. Fahroo and I. M. Ross, Costate Estimation by a Legendre Pseudospectral Method, "Journal of Guidance, Control and Dynamics", Vol.24, No.2, March-April 2001, pp.270-277.] [I. M. Ross and F. Fahroo, Legendre PseudospectralApproximations of Optimal Control Problems, "Lecture Notes inControl and Information Sciences", Vol.295, Springer-Verlag, NewYork, 2003.] Q. Gong, W. Kang and I. M. Ross, A Pseudospectral Method for TheOptimal Control of Constrained Feedback Linearizable Systems,"IEEE Trans. Auto. Cont.", Vol.~51, No.~7, July 2006,pp.~1115-1129.] .The techniques have moved rapidly from mathematical theory to real-world applications; for example, on November 5, 2006, and March 3, 2007, by tracking an attitude trajectory developed with pseudospectral optimal control theory, theInternational Space Station (ISS) completed two large angle maneuvers without using any propellant [W. Kang and N. Bedrossian, Pseudospectral Optimal Control Theory Makes Debut Flight, "SIAM News", Volume 40, Number 7, September 2007.] . In addition to savingNASA $1.5 million in propellant cost, the historic zero-propellant maneuver could not have been implemented using the current ISS control algorithm. The success of pseudospectral methods is a result of recent advances in theory, algorithms, and computational power. These advances in algorithms and technologies make it possible to solve highly complicated nonlinear optimal control problems in real-life applications. The successful applications of pseudospectral optimal control are also largely been facilitated by software package DIDO [I. M. Ross, User's manual for DIDO: A MATLAB Application Package for SolvingOptimal Control Problems, "Elissar LLC.", "www.elissar.biz", 2007.] , which exclusively use PS methods for solving optimal control problems.Mathematical Description
Solving a problem of optimal control requires the approximation of three types of mathematical objects: the integration in the cost function, the differential equation of the control system, and the state-control constraints. An ideal approximation method should be efficient for all three approximation tasks. A method that is efficient for one of them, for instance an efficient ODE solver, may not be an efficient method for the other two objects. These requirements make PS methods ideal because they are efficient for the approximation of all three mathematical objects as proved in , J. S. Hesthaven, S. Gottlieb and D. Gottlieb, Spectral methods for time-dependent problems, "Cambridge University Press", 2007. ISBN 9780521792110] and Q. Gong, I. M. Ross, W. Kang and Fahroo, F., Connections between the covector mapping theorem and convergence of pseudospectral methods for optimal control, "Computational Optimization and Applications", Springer Netherlands, published online: 31 October 2007, to appear in Journal, 2008.] .
Approximation
In PS methods, the continuous functions are approximated at a set of carefully selected quadrature nodes. Typically, these nodes are Gauss points, Gauss-Radau points or Gauss-Lobatto points. The quadrature nodes are determined by the corresponding orthogonal polynomial basis used for the approximation. In PS optimal control, Legendre and
Chebyshev polynomials are commonly used. Mathematically, quadrature nodes are able to achieve high accuracy with few number of points. For instance, the interpolating polynomial of any smooth function (C) at Legendre-Gauss-Lobatto nodes converges in L2 sense at the so-called spectral rate, i.e., faster than any polynomial rate . In pseudospectral methods, integration is approximated by quadrature rules, which provide the bestnumerical integration result. For example, with just N nodes, Gauss quadrature integration achieves zero error for any polynomial integrand of degree less than or equal to 2N+1. In the PS discretization of the ODE involved in optimal control problems, a simple but highly accurate differentiation matrix is used for the derivatives. Because a PS method enforces the system at the selected nodes, the state-control constraints can be discretized straightforwardly. All these mathematical advantages make pseudospectral methods a straightforward discretization tool for continuous optimal control problems.Covector Mapping Theorem
In pseudospectral methods, the continuous optimal control problem is discretized into a sequence of finite dimensional optimization problems that are solved by spectral algorithms. One property of PS optimal control is that it permits discretization to commute with dualization. This commutation property is enunciated as the Covector Mapping Principle, [I. M. Ross, A Roadmap for Optimal Control: The Right Way to Commute, "Annals of the New York Academy of Sciences", Vol.~1065, New York, N.Y., January 2006.] illustrated in the following figure.
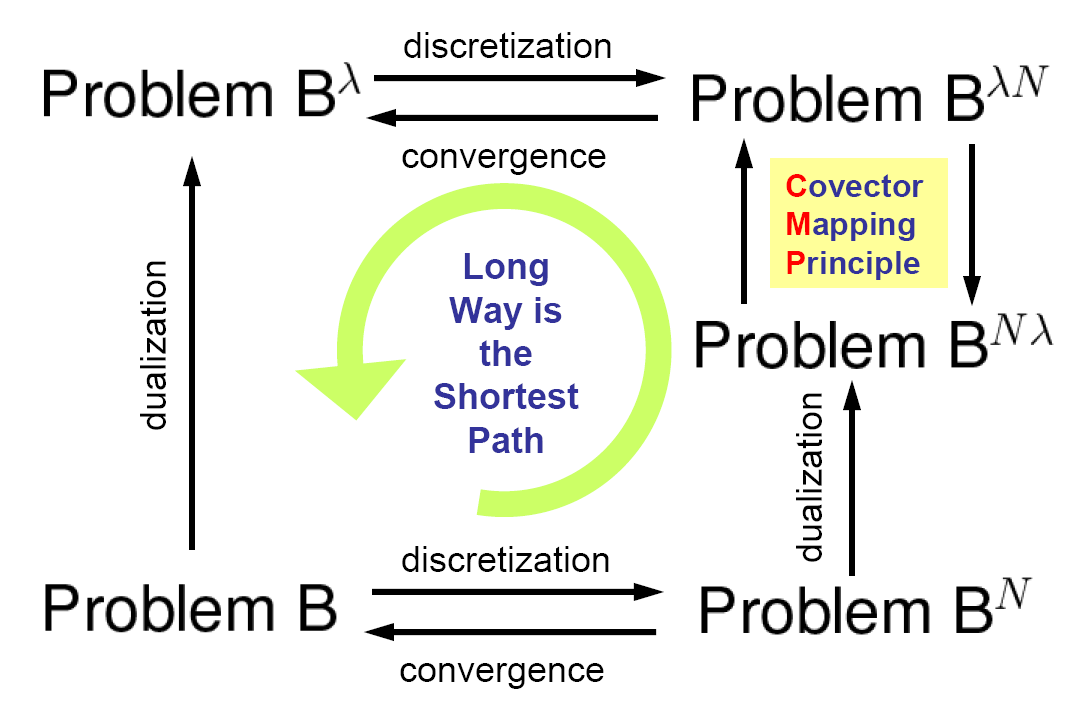
thumb|300px|center|Illustration of the Covector Mapping Principle (adapted from Ross and Fahroo [">I. M. Ross and F. Fahroo, A Perspective on Methods for Trajectory Optimization, "Proceedings of the AIAA/AAS Astrodynamics Conference", Monterey, CA, August 2002. Invited Paper No. AIAA 2002-4727.] .In this figure, the continuous optimal control problem is denoted as Problem B and the discretized finite dimensional optimization problem is denoted as Problem BN. Associated with Problem B, a set of necessary conditions (Problem B) can be obtained from an application ofPontryagin's Minimum Principle . The discretized optimization problem also admits a set of necessary conditions calledKarush-Kuhn-Tucker conditions (Problem B). The diagram shows that a putative optimal solution of the discretized problem (BN) must automatically satisfy the discretized necessary conditions (B). Solving optimal control problems by this approach is far simpler than developing and solving for the necessary conditions since solving for the necessary conditions requires solving amixed complementarity problem (see Problem B). The Covector Mapping Theorem provides the proper connection to commute dualization with discretization.References
Further reading
* Becerra, V.M., 2008, [http://www.scholarpedia.org/article/Optimal_control "Optimal control"] . [http://www.scholarpedia.org Scholarpedia] , 3(1):5354
Wikimedia Foundation. 2010.