- Course (navigation)
-
In navigation, a vehicle's course is the angle that the intended path of the vehicle makes with a fixed reference object (typically true north). Typically course is measured in degrees from 0° clockwise to 360° in compass convention (0° being north, 90° being east). Course is customarily expressed in three digits, using preliminary zeros if needed, e.g. 058°.
Contents
Determining the true course of a vessel
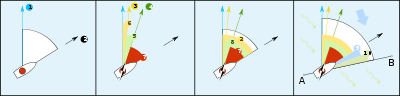
- Heading (2) is the angle of the vessel, aircraft or vehicle to an object (e.g. true north) (the heading of the ship shown in the image below is 058°).
- Any reading from a magnetic compass refers to compass north (4), which is supposed to contain a two-part compass error:
a) The Earth's magnetic field's north direction, or magnetic north (3), almost always differs from true north by magnetic variation (6), the local amount of which is given in nautical charts, and
b) ship's own magnetic field may influence the compass by so-called magnetic deviation (5).
Deviation only depends on the ship's own magnetic field and the heading, and therefore can be checked out and given as a deviation table or, graphically, as a Napier's diagram.
- The compass heading or compass course (7) has to be corrected first for deviation (the "nearer" error), wherefrom results the magnetic heading (8). Correcting this for variation yields true heading (2).
- In case of a crosswind (9), and/or tidal or other current (10), the heading will not meet the desired target, as the vessel will continuously drift sideways; it is necessary to point away from the intended course to counteract these effects.
Determining the track
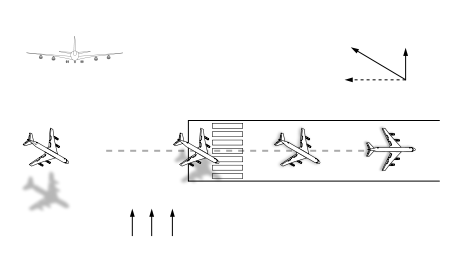
 Heading and Track (A to B)
Heading and Track (A to B)
The track or course over ground, is the actual path followed by the vessel from A to B. In the above given scheme, the corrections are shown that must be implemented to obtain the track of the vessel. Some ambiguity exists in the fact that the path a navigator intends to follow, after evaluating and counteracting possible effects of wind and current, is also called a track.
In real life, crosswinds and cross current occur which deflects the aircraft (or vessel) from its original heading (when this is not a headwind or a tailwind). The aircraft or vessel points more or less into the wind. The amount of this depends on the vehicle's speed, the wind's speed, and the angle of the wind in relation to the vehicle. To correct for these, the so-called wind correction angle and water flow correction angle is computed in advance and is frequently checked while "enroute". To correct for the water, often a correction of 20° is foreseen, while the correction for the wind is generally around 10°. Although these are the general values, the values for the correction are, of course, dependent on each individual vehicle; as such, the actual values are often found on a case-by-case method using trial and error. In the above scheme, the track would be (9) for wind from port side.
GPX is an XML schema for storing track logs.
Aircraft heading
An aircraft's heading is the direction that the aircraft's nose is pointing.
It is referenced by using either the magnetic compass or heading indicator, two instruments that most aircraft have as standard. Using standard instrumentation, it is in reference to the local magnetic north direction. True heading is in relation to the lines of meridian (north-south lines). The units are degrees from north in a clockwise direction. East is 90, south is 180 and west is 270 degrees.
 crosswindcrosswind
crosswindcrosswind
componentthrust vectorrunway
componenttouchdownAircraft performing a crosswind landingNote that, due to wind forces, the direction of movement of the aircraft, or track, is not the same as the heading. The nose of the aircraft may be pointing due west, for example, but a strong northerly wind will change its track south of west. The angle between heading and track is known as the drift angle or crab angle.
Instrumentation
Notes
- The above scheme shows a magnetic declination of 6° East, as is commonly encountered in areas of the Pacific Ocean, for instance, and a more-than-somewhat exaggerated deviation (taken from a fictitious deviation table for educational purpose) of +12°, for a compass heading of 040°. By conventional degaussing, deviation could usually be kept beyond 10°, and fluxgate compasses can be degaussed to almost D=0°.
- The possible influences of wind and current are maximized by presupposing a very slow boat in heavy wind and current.
- To increase readability of the scheme, all possible influences were given as positive, i.e. variation=East, + 12° deviation, wind and current from port side. The principle is the same for the opposite of any of the components.Initially a square symbol identifies a target in the beginning of acquisition and tracking phase. A line (vector) representing the target's relative direction of movement is displayed after 20 scans (usually less than one minute). Typically the square designator changes to a circle when steady state tracking is established after 60 scans. The end of the vector, representing target motion, predicts the position of the target after a time period between 0.5 and 30 minutes as selected by the operator. ARPA also shows pas positions of the target with a choice of 5,10 or 20 pas position dots at intervals of 0.5, 1,2,3, or 6 minutes. ARPA (Automatic Radar Plotting Aid) and ATA (Automatic Tracking Aid) have the ability to track 60 and 40 targets respectively at relative speeds of up to 150 knots. Tracked target data is output to other shipborne systems such as electronic chart systems (ECS). Targets may be acquired manually or by using the annular and polygonal automatic acquisition zones. The two conventional annular zones are of variable depth and provide protection over any arc up to and including a full circle around own ship. The polygonal zones can be drawn to virtually any shape and are particularly useful for shore-based or other static site applications. When target tracking, the operator is able to display full target data on any chosen target or CPA/TCPA data on six selected targets. The six targets may be selected manually by the operator or automatically by CPA or range.
See also
- Acronyms and abbreviations in avionics
- Navigation
- E6B
- Hodology
- Bearing (navigation)
- Breton plotter
References
- Pilot's Handbook of Aeronautical Knowledge; glossary and index[[[pt:Rumo (náutica)]]
Categories:- Aircraft instruments
- Navigation
- Tracking


Wikimedia Foundation. 2010.