- Diagonal
-
For the avenue in Barcelona, see Avinguda Diagonal.
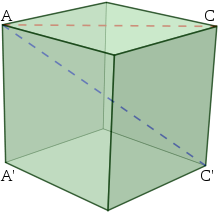 The diagonals of a cube with side length 1. AC' (shown in blue) is a space diagonal with length
The diagonals of a cube with side length 1. AC' (shown in blue) is a space diagonal with length
 , while AC (shown in red) is a face diagonal and has length
, while AC (shown in red) is a face diagonal and has length  .
.A diagonal is a line joining two nonconsecutive vertices of a polygon or polyhedron. Informally, any sloping line is called diagonal. The word "diagonal" derives from the Greek διαγώνιος (diagonios),[1] from dia- ("through", "across") and gonia ("angle", related to gony "knee"); it was used by both Strabo[2] and Euclid[3] to refer to a line connecting two vertices of a rhombus or cuboid,[4] and later adopted into Latin as diagonus ("slanting line").
In mathematics, in addition to its geometric meaning, a diagonal is also used in matrices to refer to a set of entries along a diagonal line.
Contents
Non-mathematical uses
 A stand of basic scaffolding on a house construction site, with diagonal braces to maintain its structure.
A stand of basic scaffolding on a house construction site, with diagonal braces to maintain its structure.In engineering, a diagonal brace is a beam used to brace a rectangular structure (such as scaffolding) to withstand strong forces pushing into it; although called a diagonal, due to practical considerations diagonal braces are often not connected to the corners of the rectangle.
Diagonal pliers are wire-cutting pliers whose cutting edges intersect the joint rivet at an angle or "on a diagonal".
A diagonal lashing is a type of lashing used to bind spars or poles together applied so that the lashings cross over the poles at an angle.
In association football, the diagonal system of control is the method referees and assistant referees use to position themselves in one of the four quadrants of the pitch.
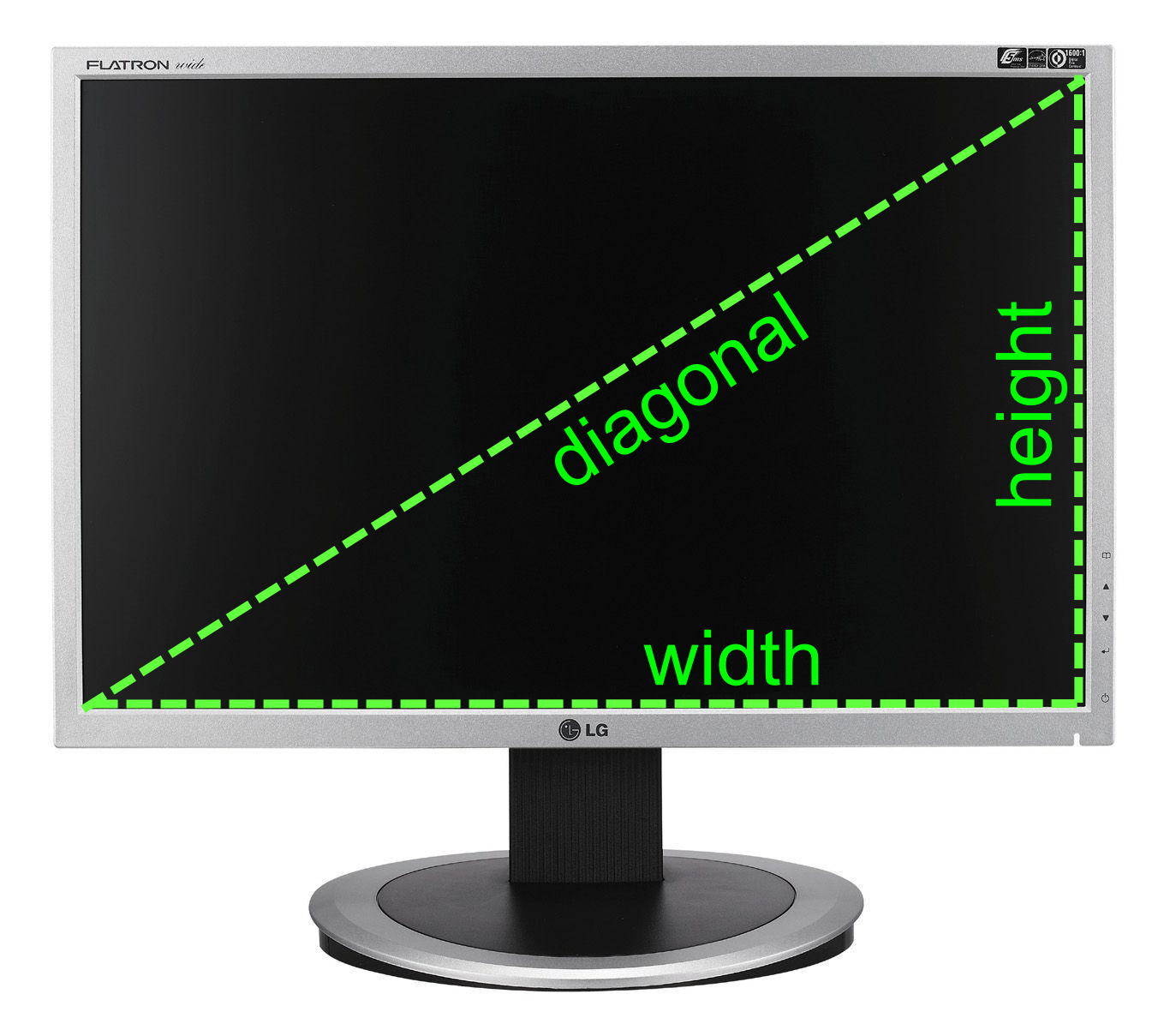
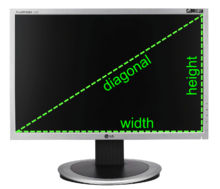 The diagonal is a common measurement of display size.
The diagonal is a common measurement of display size.Polygons
As applied to a polygon, a diagonal is a line segment joining any two non-consecutive vertices. Therefore, a quadrilateral has two diagonals, joining opposite pairs of vertices. For any convex polygon, all the diagonals are inside the polygon, but for re-entrant polygons, some diagonals are outside of the polygon.
Any n-sided polygon (n ≥ 3), convex or concave, has
diagonals, as each vertex has diagonals to all other vertices except itself and the two adjacent vertices, or n − 3 diagonals.
Sides Diagonals 3 0 4 2 5 5 6 9 7 14 8 20 9 27 10 35 Sides Diagonals 11 44 12 54 13 65 14 77 15 90 16 104 17 119 18 135 Sides Diagonals 19 152 20 170 21 189 22 209 23 230 24 252 25 275 26 299 Sides Diagonals 27 324 28 350 29 377 30 405 31 434 32 464 33 495 34 527 Sides Diagonals 35 560 36 594 37 629 38 665 39 702 40 740 41 779 42 819 Matrices
In the case of a square matrix, the main or principal diagonal is the diagonal line of entries running from the top-left corner to the bottom-right corner. For a matrix A with row index specified by i and column index specified by j, these would be entries Aij with i = j. For example, the identity matrix can be defined as having entries of 1 on the main diagonal and zeroes elsewhere:
The top-right to bottom-left diagonal is sometimes described as the minor diagonal or antidiagonal. The off-diagonal entries are those not on the main diagonal. A diagonal matrix is one whose off-diagonal entries are all zero.
A superdiagonal entry is one that is directly above and to the right of the main diagonal. Just as diagonal entries are those Aij with j = i, the superdiagonal entries are those with j = i + 1. For example, the non-zero entries of the following matrix all lie in the superdiagonal:
Likewise, a subdiagonal entry is one that is directly below and to the left of the main diagonal, that is, an entry Aij with j = i − 1. General matrix diagonals can be specified by an index k measured relative to the main diagonal: the main diagonal has k = 0; the superdiagonal has k = 1; the subdiagonal has k = − 1; and in general, the k-diagonal consists of the entries Aij with j = i + k.
Geometry
By analogy, the subset of the Cartesian product X×X of any set X with itself, consisting of all pairs (x,x), is called the diagonal, and is the graph of the identity relation. This plays an important part in geometry; for example, the fixed points of a mapping F from X to itself may be obtained by intersecting the graph of F with the diagonal.
In geometric studies, the idea of intersecting the diagonal with itself is common, not directly, but by perturbing it within an equivalence class. This is related at a deep level with the Euler characteristic and the zeros of vector fields. For example, the circle S1 has Betti numbers 1, 1, 0, 0, 0, and therefore Euler characteristic 0. A geometric way of expressing this is to look at the diagonal on the two-torus S1xS1 and observe that it can move off itself by the small motion (θ, θ) to (θ, θ + ε). In general, the intersection number of the graph of a function with the diagonal may be computed using homology via the Lefschetz fixed point theorem; the self-intersection of the diagonal is the special case of the identity function.
See also
References
- ^ Online Etymology Dictionary
- ^ Strabo, Geography 2.1.36–37
- ^ Euclid, Elements book 11, proposition 28
- ^ Euclid, Elements book 11, proposition 38
External links
- Diagonals of a polygon with interactive animation
- Polygon diagonal from MathWorld.
- Diagonal of a matrix from MathWorld.
Categories:- Elementary mathematics
- Greek loanwords





Wikimedia Foundation. 2010.