- David Hanson (robotics designer)
-
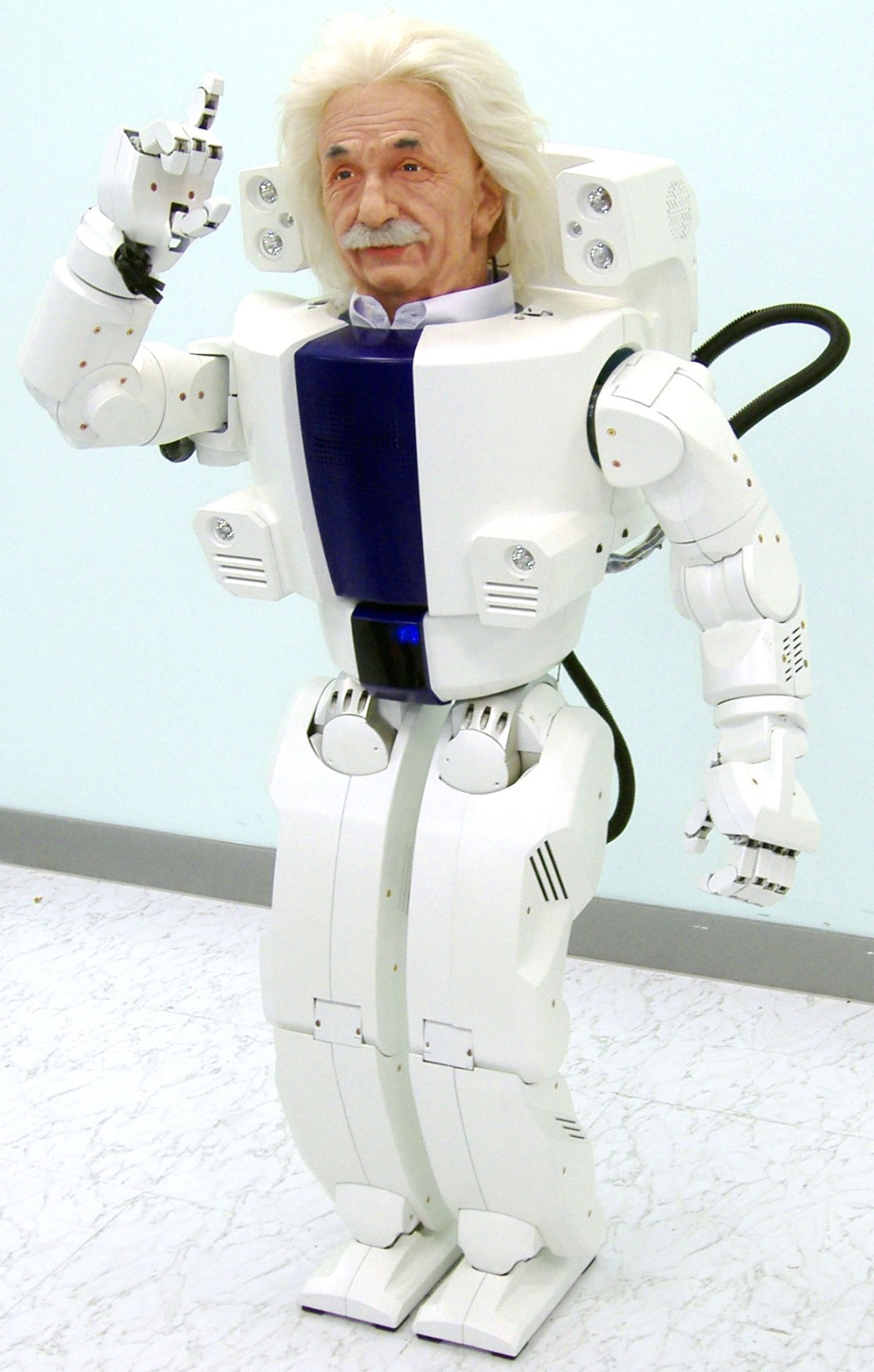
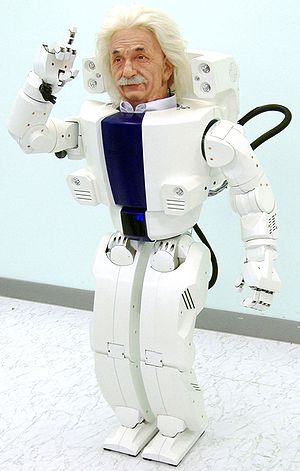 "Albert Hubo" a robot created by Hanson and the KAIST Hubo group
"Albert Hubo" a robot created by Hanson and the KAIST Hubo group
David Hanson is an American robotics designer and researcher, responsible for the creation of a series of realistic humanoid robots.[1]
Contents
Biography
Dr. David Franklin Hanson, Jr., develops human-like robots with realistic facial expressions and conversational abilities [Hanson et al., 2006]. He received a BFA from the Rhode Island School of Design in film/animation/video, while developing robots as art. Hanson later worked as a sculptor and a technical consultant at Walt Disney Imagineering. He received his Ph.D. from the University of Texas at Dallas in spring of 2007. Hanson currently serves as president and founder of Hanson Robotics.
Work
Hanson’s robots were shown first at the 2002 AAAI conference in Edmonton, Canada [Hanson, 2002] and in 2003, he showed the Kbot at the American Association for the Advancement of Science (AAAS) annual meeting [Ferber, 2003]. In 2005, Hanson and team received an AAAI award for their "intelligent conversational portrait" of Philip K. Dick [AI Magazine, Fall 2005]. First shown at the 2005 Nextfest, the robot incorporated thousands of pages of the writings of PKD, including journals and letters, into an LSA corpus and conversational system constructeandroid [Hanson et al., 2005].
In November 2005, Hanson demonstrated an expressive walking humanoid, a portrait of Albert Einstein, in collaboration with the KAIST Hubo group of Korea. KAIST built the walking body, and Hanson built the head using a flexible rubber like skin material he has created called Frubber [WIRED, 2006].
Hanson has also designed and built a series of Conversational Character Robots. These have heads incorporating Frubber, with varying levels of facial mobility and expressiveness, and are capable of responding to human speech. Projects include Joey Chaos, Jules (created for University of West England in Bristol, UK) and Alice (created for MIRALab in Geneva, Switzerland).
Publications
- (with Mathews, E., Olney, A., Zielke, M., Pereira, A.) (2005). Upending the uncanny valley, in AAAI conference proceedings.
- “Expanding the Design Domain of Humanoid Robots”, Proc. ICCS CogSci Conference, special session on Android Science, Vancouver, 2006.
- (with Jun-Ho O., Han I. Y., Kim J. K., Kim, W. S., Park, I.W.) “Design of Android type Humanoid Robot Albert HUBO”, Proc. IEEE/RJS IROS Robotics Conference, Beijing, 2006.
- “Expanding the Aesthetics Possibilities for Humanlike Robots”, Proc. IEEE '''Humanoid Robotics''' Conference, special session on the Uncanny Valley; Tskuba, Japan, December 2005.
- (with Olney A., Prilliman S., Mathews E., Zielke M., Hammons D., Fernandez R., Stephanou H.) "Upending the Uncanny Valley”, Proc. AAAI's National Conference, Pittsburgh, 2005.
- (with White V.) “Converging the Capabilities of ElectroActive Polymer Artificial Muscles and the Requirements of Bio-inspired Robotics”, Proc. SPIE’s Electroactive Polymer Actuators and Devices Conf., 10TH Smart Structures and Materials Symposium, San Diego, USA, 2004.
- (with Rus D., Canvin S., Scmeirer G.) “Applications of Bio-inspired Robotics”, Ch.10 of Biologically Inspired Intelligent Robots. Bar-Cohen, Y and Breazeal, C. (Ed.) SPIE Press, May 2003.
- "EAP Actuator Design for Biologically-inspired Face-Based Communication Robots". Proc. SPIE’s Electroactive Polymer Actuators and Devices Conf., 9th Smart Structures and Materials Symposium, San Diego, USA, 2003.
- “Bio-inspired Facial Expression Interface for Emotive Robots”, Proc. AAAI National Conference in Edmonton, CA, 2002.
References
- ^ Slagle, Matt (2 February 2004). "Can robots look all too human?". MSNBC. http://www.msnbc.msn.com/id/4137259/. Retrieved 26 August 2010.
External links
Categories:- Living people
- American sculptors
- Roboticists
- University of Texas at Dallas alumni
Wikimedia Foundation. 2010.