- Nikolai Bernstein
-
Nikolai Aleksandrovich Bernstein (Russian: Николай Александрович Бернштейн) (1896 - 1966) was a Soviet neurophysiologist.
Contents
Life
Bernstein was largely self-taught, yet his work was respected by his colleagues.
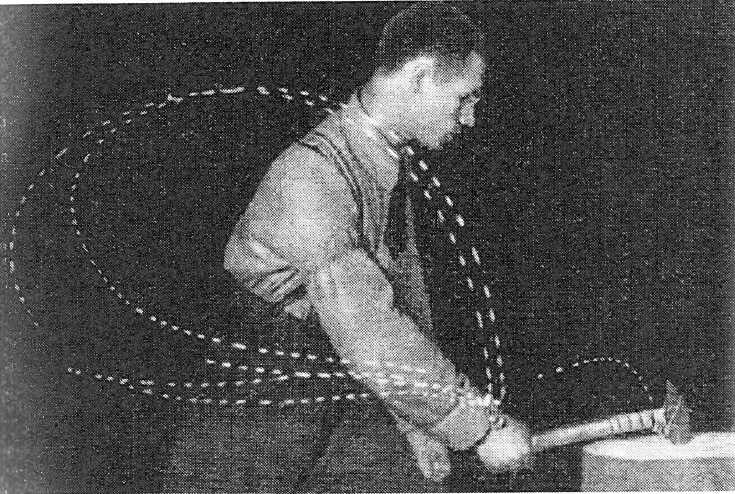
 A cyclogram of сutting metal with a chisel and hammer. Aleksei Gastev in the laboratory of the Central Institute of Labor
A cyclogram of сutting metal with a chisel and hammer. Aleksei Gastev in the laboratory of the Central Institute of Labor
His first scientific work was in 1922, when he, along with other researchers, were invited to study movement during manual labor in Moscow's Central Institute of Labor. The purpose of the study was to optimize productivity, and Bernstein's analysis focused on cutting metal with a chisel. He used cyclographic techniques to track human movement, a technique he would continue using for many of his experiments. His research showed that most movements, like hitting a chisel with a hammer, are composed of smaller movements. Any one of these smaller movements, if altered, affect the movement as a whole.
In 1926, Bernstein started a series of experiments that examined human walking. Originally, this work was to help with the engineering of pedestrian bridges. He studied the development of walking as humans matured and aged, and he also examined the gaits of those with brain damage.
In 1935, he received a Doctor of Science degree without submitting a thesis. He was also one of the first members of the USSR Academy of Medical Sciences, founded in 1944. In 1948, he was awarded the Stalin Prize for science.
Since he did his research behind the iron curtain of the USSR, his ideas only became known to Western scientists in the 1960s, when his seminal book, The Co-ordination and Regulation of Movements, was translated into English from Russian.
Work
Bernstein was one of the pioneers in the field of motor control and motor learning. The field of motor control basically studies how the Central Nervous System (CNS) controls posture and movement. Understanding how humans plan and control movement is a major challenge because of the large number of joints that provide the human musculoskeletal system with numerous kinematic degrees of freedom. Because the goal of most movement tasks, like moving a hand to a target, is defined in terms of a much smaller number of kinematic degrees of freedom, it can be achieved in an infinite number of different ways (also referred to as the 'inverse kinematics problem'). Furthermore, the number of muscles acting across a joint generally exceeds the number of kinematic degrees of freedom of that joint. As a result, a given movement can be realized with an infinite number of muscle activation patterns (also referred to as the 'inverse dynamics problem'). Even though a goal can be reached in an infinite number of ways, many studies have revealed very consistent and stereotypical patterns of kinematics and muscle activation. Evidently, the Central Nervous System (CNS) is capable of adequately controlling the many degrees of freedom. This question of how the CNS is capable of adequately controlling the many degrees of freedom of the musculoskeletal system was first addressed by Bernstein ([1]) and is now known as the 'Bernstein problem'.
Bernstein suggested that the CNS is capable of "functionally freezing degrees of freedom." As an analogy, controlling the four wheels of a car independently is very difficult. Yet, by functionally freezing degrees of freedom (the two rear wheels are only allowed to rotate around one shared horizontal axis, and the two front wheels are also allowed to rotate in parallel around a longitudinal axis, controlled by the steering wheel) a car becomes much easier to control. Bernstein also did major work with motor learning, creating models for stages of learning. His work in the 1950's and 1960's was remarkably insightful and is still valid and respected today.He was likely very much influenced by the work of John Hughlings Jackson, who posited a hierarchical organization of the nervous system.
American kinesiologist Karl Newell is one of many to be greatly influenced by Bernstein. Newell (1986) arranged constraints into three main groups: Individual(structural or functional), task, and environmental constraints. [2]
Bernstein also coined the term biomechanics, the study of movement through the application of mechanical principles.
See also
- Runbot, a "fast-walking" robot, whose movements and adaptability are based on Bernstein's theories.
Publications
- The co-ordination and regulation of movements. Oxford: Pergamon Press. 1967
- Bewegungsphysiologie, Leipzig 1982.
- On co-ordination and its development, Moskow 1991.
- Die Entwicklung der Bewegungsfertigkeiten, Leipzig 1996.
References
- ^ Bernstein, N.A. (1967). The co-ordination and regulation of movements. Oxford : Pergamon Press.
- ^ Newell, K.M. (1986). Constraints on the development of coordination. In M.G. Wade & H.T.A. Whiting (Eds.), Motor development in children: Aspects of coordination and control (pp. 341–361). Amsterdam: Nijhoff
Further reading
- Latash, Mark L. (ed.) Progress in Motor Control: Bernstein's Traditions in Movement Studies, Vol. 1
External links
- Nikolai Bernstein in the German National Library catalogue (German)
- Generalogie der Familien Eger und Bernstein
- History of the Study of Locomotion
Categories:- Russian physiologists
- Stalin Prize winners
- 1896 births
- 1966 deaths
- Russian scientist stubs
Wikimedia Foundation. 2010.