- Control moment gyroscope
-
A control momentum gyroscope (CMG) is an attitude control device generally used in spacecraft attitude control systems. A CMG consists of a spinning rotor and one or more motorized gimbals that tilt the rotor’s angular momentum. As the rotor tilts, the changing angular momentum causes a gyroscopic torque that rotates the spacecraft.
Contents
Mechanics
CMGs differ from reaction wheels. The latter applies torque simply by changing rotor spin speed, but the former tilts the rotor's spin axis without necessarily changing its spin speed. CMGs are also far more power efficient. For a few hundred watts and about 100 kg of mass, large CMGs have produced thousands of newton meters of torque. A reaction wheel of similar capability would require megawatts of power.
Design varieties
Single-gimbal
The most effective CMGs include only a single gimbal. When the gimbal of such a CMG rotates, the change in direction of the rotor's angular momentum represents a torque that reacts onto the body to which the CMG is mounted, e.g. a spacecraft. Except for effects due to the motion of the spacecraft, this torque is due to a constraint, so it does no mechanical work (i.e. requires no energy). Single-Gimbal CMGs exchange angular momentum in a way that requires very little power, with the result that they can apply very large torques for minimal electrical input.
Dual-gimbal
Such a CMG includes two gimbals per rotor. As an actuator it is more versatile than a single-gimbal CMG because it is capable of pointing the rotor's momentum vector in any direction. However, the torque caused by one gimbal's motion often must be reacted by the other gimbal on its way to the spacecraft, requiring more power for a given torque than a single-gimbal CMG. If the goal is simply to store momentum in a mass-efficient way, as in the case of the International Space Station, dual-gimbal CMGs are a good design choice. Instead, if a spacecraft requires large output torque per available input power, single-gimbal CMGs are a better choice.
Variable-speed
Most CMGs hold the rotor speed constant. Some academic research has focused on the possibility of spinning up and down the rotor as the CMG gimbals. These so-called variable-speed CMGs (VSCMGs) offer few practical advantages, mostly because the output torque from the rotor is likely orders of magnitude smaller than that caused by the gimbal motion. So, this effect adds nothing of practical value on the time scale of the motion typical of CMGs. However, thanks to the additional degree of freedom, the variable-speed CMG can be used to avoid the geometric singularity that is the most serious drawback of the conventional CMG. The VSCMG also can be used as a mechanical battery to store electric energy as kinetic energy of the flywheels.
Singularities
At least three single-axis CMGs are necessary for control of spacecraft attitude. However, no matter how many CMGs a spacecraft uses, gimbal motion can lead to relative orientations that produce no usable output torque along certain directions. These orientations are known as "singularities" and are related to the kinematics of robotic systems that encounter limits on the end-effector velocities due to certain joint alignments. Avoiding these singularities is naturally of great interest, and several techniques have been proposed. David Bailey and others have argued (in patents and in academic publications) that merely avoiding the "divide by zero" error that is associated with these singularities is sufficient.[1][2] Two more recent patents summarize competing approaches.[3][4]
International Space Station
 NASA personnel handle a single Control Moment Gyroscope for the International Space Station.
NASA personnel handle a single Control Moment Gyroscope for the International Space Station.
The ISS employs a total of four CMGs as primary actuating devices during normal flight mode operation. The objective of the CMG flight control system is to hold the space station at a fixed attitude relative to the surface of the Earth. In addition, it seeks a Torque Equilibrium Attitude (TEA), in which the combined torque contribution of gravity gradient, atmospheric drag, solar pressure, and geomagnetic interactions are minimized. In the presence of these continual environmental disturbances CMGs absorb momentum in an attempt to maintain the space station at a desired attitude. The CMGs may eventually saturate (absorbing momentum to the point where they can absorb no more), resulting in loss of effectiveness of the CMG array for control. Some kind of momentum management scheme (MMS) is necessary to allow the CMGs to hold a desired attitude and at the same time prevent CMG saturation. Since the CMGs are momentum-exchange devices, external control torques must be used to desaturate the CMGs, that is, bring the momentum back to nominal value. Some methods for unloading CMG momentum include the use of magnetic torques, reaction thrusters, and gravity gradient torque. For the space station, the gravity gradient torque approach is preferred because it requires no consumables or external hardware and because the gravity-gradient torque on the ISS can be very high.[5]
-

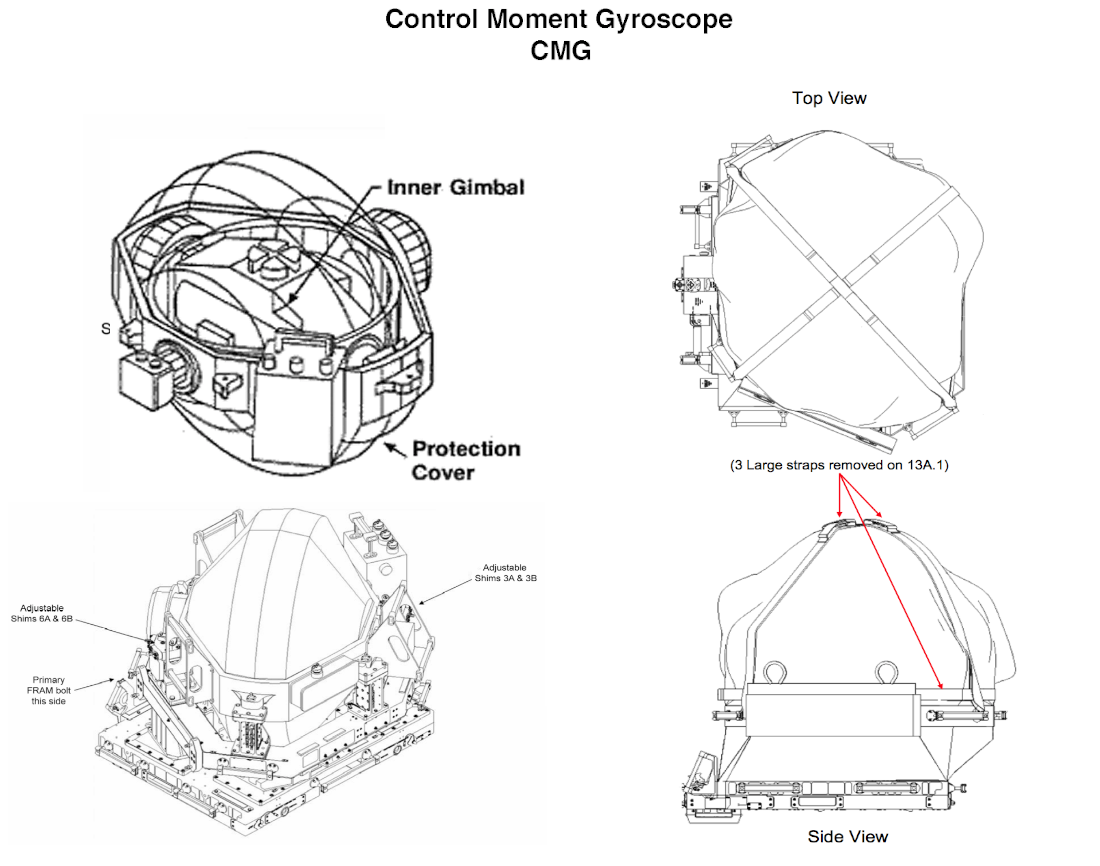
Control Moment Gyroscope (CMG)
-

CMG drawing (cover removed)
See also
- Momentum wheel
References
- ^ Orienting a satellite with controlled momentum gyros - US Patent 6154691
- ^ American Institute of Aeronautics and Astronautics - Electronic Library Search Results
- ^ US Patent 7246776
- ^ US Patent Application 20070124032
- ^ A. Pothiawala, M.A. Dahleh, Hoo OPTIMAL CONTROL FOR THE ATTITUDE CONTROL AND MOMENTUM MANAGEMENT OF THE SPACE STATION, MIT, Cambridge, MA 02139, URL=http://dspace.mit.edu/bitstream/1721.1/3208/1/P-1985-22200134.pdf
External links
CMG applications and fundamental research are undertaken at several institutions.
- Georgia Tech's Panagiotis Tsiotras has studied variable-speed CMGs in connection with flywheel energy storage and has built a spacecraft simulator based on them: faculty page
- Virginia Tech's Christopher Hall has built a spacecraft simulator as well: faculty page
- Texas A&M's John Junkins and Srinivas Vadali have written papers on VSCMGs for use in singularity avoidance: faculty page
- Cornell's Mason Peck is researching CMG-driven spaceborne robots CMG project page and has written about Honeywell's CMG-driven spacecraft simulator: faculty page
- Space Systems Group at the University of Florida under Prof. Norman Fitz-Coy have been researching on the development of CMGs for pico- and nano-satellites and on various steering logics for singularity avoidance SSG
- Professor Brij Agrawal at the Naval Postgraduate School has built two spacecraft simulators, at least one of which uses CMGs: [1]
- Honeywell Defense and Space Systems performs research in Control Moment Gyros They also have developed a spacecraft simulator driven by CMGs: CMG Testbed Video
- Naval Postgraduate School's Marcello Romano has studied variable-speed CMGs and has developed a mini single gimbal control moment gyro for laboratory experiment of spacecraft proximity maneuvers faculty page
CMG manufacturers
- Astrium (a small single-gimbal CMG whose rotor is provided by Teldix): Astrium CMG
- Honeywell Defense and Space Systems is the most prolific builder of CMGs for space applications. Their next-generation CMGs involve embedded control of multiple CMGs in a single momentum-control system and modular design, as described in Porter Davis's paper at the 2006 Guidance and Control Conference: 2006 AAS GNC Conference Program
- L-3 Communications (the ISS CMGs, which include two gimbals per rotor) DGCMG 4800/250
- Surrey Space Centre (a small CMG built for the Turkish BilSAT spacecraft): CMGs
- GDC Guidance Dynamics Corporation (non-flightworthy research-grade variable-speed CMGs used in some flight simulators):
- Model 750 Educational Control Products (non-flightworthy classroom-demo multi-gimbal CMG)
- Space Systems Group (University of Florida, CMGs for pico- and nano-satellites) SSG
- Seakeeper Inc. Offer CMGs designed to attenuate the roll amplitude of offshore boats: http://www.seakeeper.com/gyro.html
- Ship Dynamics Design and manufacture ship stabilisers that use CMGs to attenuate the roll motion of luxury yachts and monohulls over 20m.: http://www.shipdynamics.com
- Mitsubishi Heavy Industries Producer of the Mitsubishi Anti Rolling Gyro, a CMG developed for luxury yachts, fishing, commercial and research vessels. http://www.antirollinggyro.com
Categories:- Gyroscopes
-


Wikimedia Foundation. 2010.