- Neo-Hookean solid
-
Continuum mechanics  LawsScientists
LawsScientistsA Neo-Hookean solid[1][2] is a hyperelastic material model, similar to Hooke's law, that can be used for predicting the nonlinear stress-strain behavior of materials undergoing large deformations. The model was proposed by Ronald Rivlin in 1948. In contrast to linear elastic materials, a the stress-strain curve of a neo-Hookean material is not linear. Instead, the relationship between applied stress and strain is initially linear, but at a certain point the stress-strain curve will plateau. The neo-Hookean model does not account for the dissipative release of energy as heat while straining the material and perfect elasticity is assumed at all stages of deformation.
The neo-Hookean model is based on the statistical thermodynamics of cross-linked polymer chains and is usable for plastics and rubber-like substances. Cross-linked polymers will act in a neo-Hookean manner because initially the polymer chains can move relative to each other when a stress is applied. However, at a certain point the polymer chains will be stretched to the maximum point that the covalent cross links will allow, and this will cause a dramatic increase in the elastic modulus of the material. The neo-Hookean material model does not predict that increase in modulus at large strains and is typically accurate only for strains less than 20%[3]. The model is also inadequate for biaxial states of stress and has been superseded by the Mooney-Rivlin model.
The strain energy density function for an incompressible neo-Hookean material is
where C1 is a material constant, and I1 is the first invariant of the left Cauchy-Green deformation tensor, i.e.,
where λi are the principal stretches. For a compressible neo-Hookean material the strain energy density function is given by
where D1 is a material constant,
 is the first invariant of the deviatoric part of the left Cauchy-Green deformation tensor, and
is the first invariant of the deviatoric part of the left Cauchy-Green deformation tensor, and  is the deformation gradient. Several alternative formulations exist for compressible neo-Hookean materials, for example [1]
is the deformation gradient. Several alternative formulations exist for compressible neo-Hookean materials, for example [1]For consistency with linear elasticity,
where μ is the shear modulus and κ is the bulk modulus.
Contents
Cauchy stress in terms of deformation tensors
Compressible neo-Hookean material
For a compressible Rivlin neo-Hookean material the Cauchy stress is given by
where
 is the left Cauchy-Green deformation tensor, and
is the left Cauchy-Green deformation tensor, andFor infinitesimal strains (
 )
)and the Cauchy stress can be expressed as
Comparison with Hooke's law shows that μ = 2C1 and κ = 2D1.
-
Proof: The Cauchy stress in a compressible hyperelastic material is given by
For a compressible Rivlin neo-Hookean material,
while, for a compressible Ogden neo-Hookean material,
Therefore, the Cauchy stress in a compressible Rivlin neo-Hookean material is given by
while that for the corresponding Ogden material is
If the isochoric part of the left Cauchy-Green deformation tensor is defined as
 , then we can write the Rivlin neo-Heooken stress as
, then we can write the Rivlin neo-Heooken stress asand the Ogden neo-Hookean stress as
The quantities
have the form of pressures and are usually treated as such. The Rivlin neo-Hookean stress can then be expressed in the form
while the Ogden neo-Hookean stress has the form
Incompressible neo-Hookean material
For an incompressible neo-Hookean material with J = 1
where p is an undetermined pressure.
Cauchy stress in terms of principal stretches
Compressible Neo-Hookean material
For a compressible neo-Hookean hyperelastic material, the principal components of the Cauchy stress are given by
Therefore, the differences between the principal stresses are
-
Proof: For a compressible hyperelastic material, the principal components of the Cauchy stress are given by
The strain energy density function for a compressible neo Hookean material is
Therefore,
Since J = λ1λ2λ3 we have
Hence,
The principal Cauchy stresses are therefore given by
Incompressible Neo-Hookean material
In terms of the principal stretches, the Cauchy stress differences for an incompressible hyperelastic material are given by
For an incompressible neo-Hookean material,
Therefore,
which gives
Uniaxial extension
Compressible neo-Hookean material
 The true stress as a function of uniaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.
The true stress as a function of uniaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.
For a compressible material undergoing uniaxial extension, the principal stretches are
Hence, the true (Cauchy) stresses for a compressible neo-Hookean material are given by
The stress differences are given by
If the material is unconstrained we have σ22 = σ33 = 0. Then
Equating the two expressions for σ11 gives a relation for J as a function of λ, i.e.,
or
The above equation can be solved numerically using a Newton-Raphson iterative root finding procedure.
Incompressible neo-Hookean material
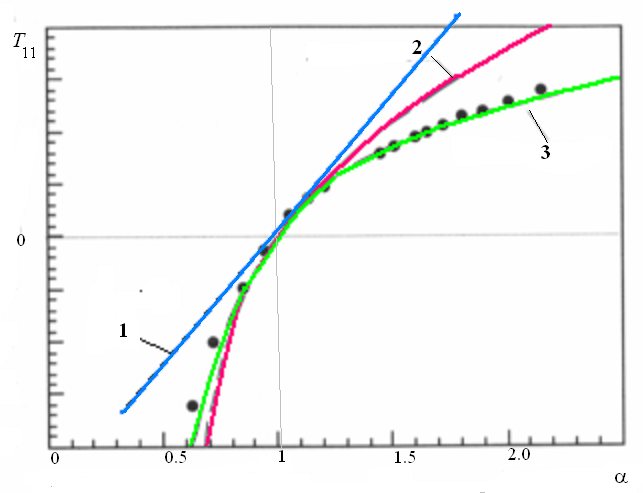
 Comparison of experimental results (dots) and predictions for Hooke's law(1), Neo-Hookean solid(2) and Mooney-Rivlin solid models(3)
Comparison of experimental results (dots) and predictions for Hooke's law(1), Neo-Hookean solid(2) and Mooney-Rivlin solid models(3)Under uniaxial extension,
 and
and  . Therefore,
. Therefore,Assuming no traction on the sides, σ22 = σ33 = 0, so we can write
where ε11 = λ − 1 is the engineering strain. This equation is often written in alternative notation as
The equation above is for the true stress (ratio of the elongation force to deformed cross-section). For the engineering stress the equation is:
For small deformations
 we will have:
we will have:- σ11 = 6C1ε = 3με
Thus, the equivalent Young's modulus of a neo-Hookean solid in uniaxial extension is 3μ.
Equibiaxial extension
Compressible Neo-Hookean material
 The true stress as a function of biaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.
The true stress as a function of biaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.In the case of equibiaxial extension
Therefore,
The stress differences are
If the material is in a state of plane stress then σ33 = 0 and we have
We also have a relation between J and λ:
or,
This equation can be solved for J using Newton's method.
Incompressible Neo-Hookean material
For an incompressible material J = 1 and the differences between the principal Cauchy stresses take the form
Under plane stress conditions we have
Pure dilation
For the case of pure dilation
Therefore, the principal Cauchy stresses for a compressible neo-Hookean material are given by
If the material is incompressible then λ3 = 1 and the principal stresses can be arbitrary.
The figures below show that extremely high stresses are needed to achieve large triaxial extensions or compressions. Equivalently, relatively small triaxial stretch states can cause very high stresses to develop in a rubber-like material. Note also that the magnitude of the stress is quite sensitive to the bulk modulus but not to the shear modulus.
 The true stress as a function of equi-triaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.
The true stress as a function of equi-triaxial stretch predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber. The true stress as a function of J predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.
The true stress as a function of J predicted by a compressible neo-Hookean material for various values of C1,D1. The material properties are representative of natural rubber.Simple shear
For the case of simple shear the deformation gradient in terms of components with respect to a reference basis is of the form [1]
where γ is the shear deformation. Therefore the left Cauchy-Green deformation tensor is
Compressible Neo-Hookean material
In this case
 . Hence,
. Hence,  . Now,
. Now,Hence the Cauchy stress is given by
Incompressible Neo-Hookean material
Using the relation for the Cauchy stress for an incompressible neo-Hookean material we get
Thus neo-Hookean solid shows linear dependence of shear stresses upon shear deformation and quadratic dependence of the normal stress difference on the shear deformation. Note that the expressions for the Cauchy stress for a compressible and an incompressible neo-Hookean material in simple shear represent the same quantity and provide a means of determining the unknown pressure p.
References
- ^ a b c Ogden, R. W. , 1998, Nonlinear Elastic Deformations, Dover.
- ^ C. W. Macosko, 1994, Rheology: principles, measurement and applications, VCH Publishers, ISBN 1-56081-579-5.
- ^ Gent, A. N., ed., 2001, Engineering with rubber, Carl Hanser Verlag, Munich.
See also
Categories:- Continuum mechanics
- Non-Newtonian fluids
- Rubber properties
- Solid mechanics










![\boldsymbol{\sigma} = \cfrac{2}{J}\left[\cfrac{1}{J^{2/3}}\left(\cfrac{\partial{W}}{\partial \bar{I}_1} + \bar{I}_1~\cfrac{\partial{W}}{\partial \bar{I}_2}\right)\boldsymbol{B} -
\cfrac{1}{J^{4/3}}~\cfrac{\partial{W}}{\partial \bar{I}_2}~\boldsymbol{B} \cdot\boldsymbol{B} \right] + \left[\cfrac{\partial{W}}{\partial J} -
\cfrac{2}{3J}\left(\bar{I}_1~\cfrac{\partial{W}}{\partial \bar{I}_1} + 2~\bar{I}_2~\cfrac{\partial{W}}{\partial \bar{I}_2}\right)\right]~\boldsymbol{\mathit{1}}](b/74b172f8e241a41aa805133430a6105a.png)


![\boldsymbol{\sigma} = \cfrac{2}{J}\left[\cfrac{1}{J^{2/3}}~C_1~\boldsymbol{B} \right] + \left[2D_1(J-1)-
\cfrac{2}{3J}~C_1\bar{I}_1\right]\boldsymbol{\mathit{1}}](2/3a2a99dd81713ab69718340320903a21.png)
![\boldsymbol{\sigma} = \cfrac{2}{J}\left[\cfrac{1}{J^{2/3}}~C_1~\boldsymbol{B} \right] + \left[2D_1(J-1)-\cfrac{2C_1}{J} -
\cfrac{2}{3J}~C_1\bar{I}_1\right]\boldsymbol{\mathit{1}}](2/a32e933fc36f5fc1be69b73e518e7bfb.png)
![\boldsymbol{\sigma} = \cfrac{2C_1}{J}\left[\bar{\boldsymbol{B}} - \tfrac{1}{3}\bar{I}_1\boldsymbol{\mathit{1}}\right] + 2D_1(J-1)\boldsymbol{\mathit{1}} = \cfrac{2C_1}{J}\mathrm{dev}(\bar{\boldsymbol{B}}) + 2D_1(J-1)\boldsymbol{\mathit{1}}](9/ea9b42f32d2b1ce8ce438c845fad0e25.png)
![\boldsymbol{\sigma} = \cfrac{2C_1}{J}\left[\bar{\boldsymbol{B}} - \tfrac{1}{3}\bar{I}_1\boldsymbol{\mathit{1}} -\boldsymbol{\mathit{1}} \right] + 2D_1(J-1)\boldsymbol{\mathit{1}} = \cfrac{2C_1}{J}\left[\mathrm{dev}(\bar{\boldsymbol{B}})-\boldsymbol{\mathit{1}}\right] + 2D_1(J-1)\boldsymbol{\mathit{1}}](a/04a2c8c7678424fea4e37791d74b01cc.png)




![\sigma_{i} = 2C_1\left[\cfrac{\lambda_i^2}{J^{5/3}}-\cfrac{I_1}{3J} \right] + 2D_1(J-1) ~;~~ i=1,2,3](1/9d141aa98837c17856acde79f6717b98.png)


![W = C_1(\bar{I}_1-3) + D_1(J-1)^2
= C_1\left[J^{-2/3}(\lambda_1^2+\lambda_2^2+\lambda_3^2)-3\right] + D_1(J-1)^2](0/e60e024c283fd4b82f0a8934e73ee359.png)
![\lambda_i\frac{\partial W}{\partial \lambda_i} =
C_1\left[-\frac{2}{3}J^{-5/3}\lambda_i\frac{\partial J}{\partial \lambda_i}(\lambda_1^2+\lambda_2^2+\lambda_3^2)
+2J^{-2/3}\lambda_i^2\right] + 2D_1(J-1)\lambda_i\frac{\partial J}{\partial \lambda_i}](b/19bc9973ff98ec20e4bdfc67b674867e.png)

![\begin{align}
\lambda_i\frac{\partial W}{\partial \lambda_i} & =
C_1\left[-\frac{2}{3}J^{-2/3}(\lambda_1^2+\lambda_2^2+\lambda_3^2)
+2J^{-2/3}\lambda_i^2\right] + 2D_1J(J-1) \\
& = 2C_1J^{-2/3}\left[-\frac{1}{3}(\lambda_1^2+\lambda_2^2+\lambda_3^2)
+\lambda_i^2\right] + 2D_1J(J-1)
\end{align}](1/e1152ee135dea7b2fc543dd47a0dcb99.png)
![\sigma_i = 2C_1\left[\cfrac{\lambda_i^2}{J^{5/3}}-\cfrac{I_1}{3J} \right] + 2D_1(J-1)](5/d353a2473108fa89122bee46c9a91da5.png)

















![\begin{align}
\sigma_{11} & = 2C_1\left[\cfrac{\lambda^2}{J^{5/3}} - \cfrac{1}{3J}\left(2\lambda^2+\cfrac{J^2}{\lambda^4}\right)\right] + 2D_1(J-1) \\
& = \sigma_{22} \\
\sigma_{33} & = 2C_1\left[\cfrac{J^{1/3}}{\lambda^4} - \cfrac{1}{3J}\left(2\lambda^2+\cfrac{J^2}{\lambda^4}\right)\right] + 2D_1(J-1)
\end{align}](0/8e05a17b0230989e4768c5d152d3ea49.png)


![2C_1\left[\cfrac{\lambda^2}{J^{5/3}} - \cfrac{1}{3J}\left(2\lambda^2+\cfrac{J^2}{\lambda^4}\right)\right] + 2D_1(J-1) = \cfrac{2C_1}{J^{5/3}}\left(\lambda^2 - \cfrac{J^2}{\lambda^4}\right)](d/fed9f904a5ff8b04d3a9c52a07b2130c.png)












Wikimedia Foundation. 2010.